集中型から分散型マイクログリッドへ
現在、ほとんどのマイクログリッドは標準的なマスタースレーブアーキテクチャを用いた集中管理方式で制御されています。監視制御器である中央コントローラが、マイクログリッド内のすべてのDERにポイントツーポイント接続されています。
ARPA-Eの資金提供を受けたイリノイ大学アーバナ・シャンペーン校(UIUC)の研究者たちは、完全に分散化された制御アーキテクチャを開発しました。中央制御器の代わりに、複数のマイクロコントローラまたはノードが隣接するノードと通信し、合意形成を目指します。UIUCの電力・エネルギーシステムの博士課程学生であるオラオル・アジャラ氏は、ハードウェア・イン・ザ・ループ(HIL)マイクログリッド・テストベッドを用いて、この分散制御アーキテクチャの仕組みを説明しています。
ハードウェア・イン・ザ・ループ・マイクログリッド・テストベッド
分散型マイクログリッド制御デモは、分散型エネルギー資源(DER)の調整に使用されるインバータごとに1台ずつ、複数の分散型コントローラを備えたハードウェア・イン・ザ・ループ(HIL)テストベッドで構成されています。このデモでは、例として、基幹系統に提供される周波数調整サービスを示します。
このハードウェア・イン・ザ・ループ・テストベッドでは、独立したシステム運用者が2~4秒ごとにアグリゲータ(コンピュータ)に調整信号を送信します。アグリゲータはこの情報を用いて、タイライン・インターチェンジが調整信号に追従するために必要な発電量の変化量を決定します。そして、アグリゲータはこの変化量をオレンジ色のマイクロコントローラで示されるリーダーに伝えます。
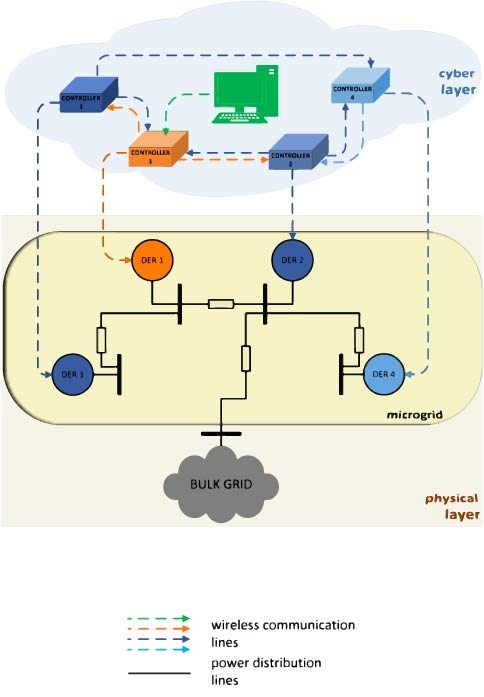
2つのマイクログリッドテストベッドレイヤー
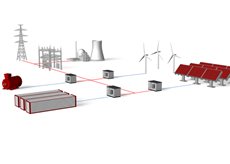
物理層はマイクログリッドで構成され、一連の連系線を介して基幹電力網に相互接続されています。マイクログリッドには4つのインバータインターフェース付き分散電源(DER)があり、それぞれが指定された有効電力と無効電力をシステムに供給するように制御されます。これらはすべて、Typhoon HIL402リアルタイムシミュレータでモデル化およびシミュレーションされています。Typhoon HIL402は、物理層の高忠実度モデリングとリアルタイムシミュレーションに使用されます。
サイバー層は、通信ネットワークを介して相互接続されたアグリゲータと4つの制御デバイスで構成されています。サイバー層の各制御デバイスは、物理層のDERを制御します。DERは、コンピュータ、4つのマイクロコントローラ、XBeeベースの無線通信ネットワークというハードウェアデバイスを使用して実装されています。

サイバー レイヤーは、次の 3 つの主要なタスクを実行します。
- マイクログリッドにおける総発電量の必要な変化を決定する。
- 各DERの発電量の変化に対する最適な貢献を分散的に計算し、
- 各 DER をローカルに制御し、それに応じて発電量を変更します。
分散通信ネットワーク
サイバーレイヤーには分散型通信・制御アーキテクチャが実装されています。このアーキテクチャは、通信リンク障害に対して堅牢な設計となっています。4台の制御デバイスはそれぞれ、Cat6ケーブルを介してマイクログリッド内のDERに接続され、Modbus TCP通信プロトコルを使用しています。
リーダーノードは直ちにこの情報を近隣ノードに伝達します。近隣ノードもさらに近隣ノードに伝達し、このプロセスは分散システムが漸近的に合意に達するまで、すべての制御デバイスによって繰り返されます。
すべての制御装置が、総発電量の必要な変化に対するDERの最適な寄与を計算した時点で合意に達します。合意に達するとすぐに、制御装置は制御対象のDERの発電量を調整します。
クレジット
著者| サマンサ・ブルース
ビジュアル| イリノイ大学アーバナ・シャンペーン校
編集者| デボラ・サント