はじめに| IPG-Typhoon HIL協調シミュレーションの起源
HTWザールでのJulian Riedelの論文の一環として、Typhoon HILとIPG CarMakerの協調シミュレーションが開発されました。このコンテキストでは、Typhoon HIL HIL604リアルタイムシミュレーターがCAN通信を介してIPG CarMakerに接続され、電気自動車の全輪駆動シミュレーションモデルが作成されました。このシミュレーションモデルは、ラーフェンスブルク=ヴァインガルテン大学(RWU)の別の論文でさらに開発されました。詳細なバッテリーモデルとバッテリー管理システム(BMS)がHIL上のドライブトレインモデルに統合されました。さらに、システムに障害を導入するためのさまざまな方法が統合され、フォールトインジェクションテスト(FIT)が実行されました。IPG CarMakerとTyphoon HILの協調シミュレーションにより、Typhoon HILでシミュレートされた電気部品のリアルタイム応答を観察し、路上での車両の動的応答を分析することができます。さらに、車両のダイナミクス、ルート、環境の影響の検証が可能になり、ドライブトレインの障害が車両の挙動に与える影響を正確に分析できます。
ソリューション| 協調シミュレーションのセットアップ
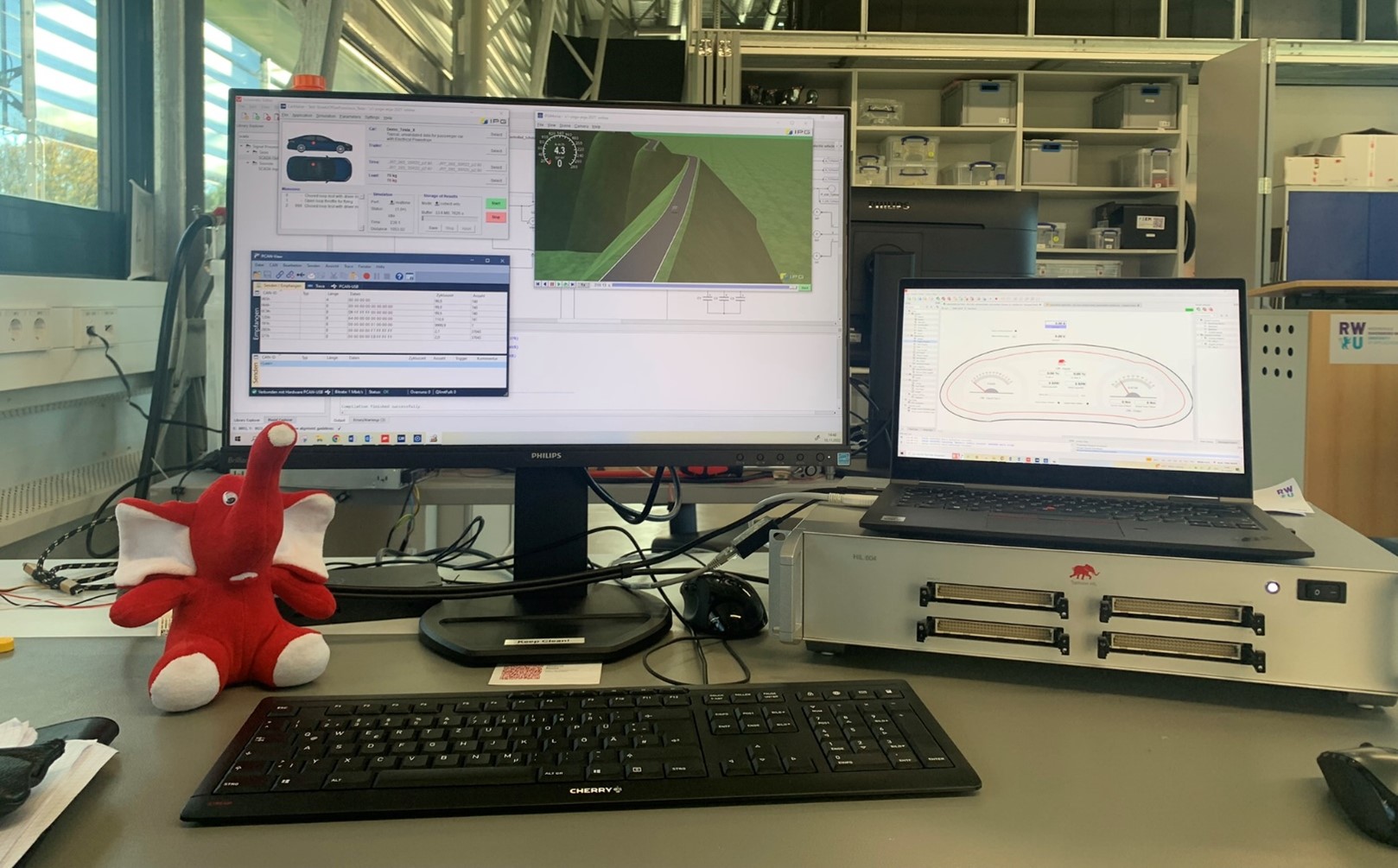
協調シミュレーションを実現するために、 HIL604ハードウェアデバイスと付属のTyphoon HIL Control Centerツールチェーンに加え、 IPG AutomotiveのCarMakerソフトウェアをホストコンピュータ上で実行します。2つのコンポーネント間の通信はCANを介して行われます。セットアップは図1に示されています。
この車両モデルは、車軸ごとに1つずつ非同期モーターを搭載した全輪駆動のバッテリー電気自動車(BEV)を表しています。モデル車両はTesla Model X 100Dをベースとしています。電気モーター、インバーター、コントローラー、バッテリー、バッテリー管理システムなど、すべてのドライブトレインコンポーネントは、Typhoon HILシステムでシミュレーションされます。路面、シャーシ、ドライバー、走行抵抗、そして車両ダイナミクスは、CarMakerシミュレーション環境でシミュレーションされます。これらのシミュレーションモデルを組み合わせることで、システムレベルでの包括的な車両シミュレーションが実現し、新たなテストの可能性が広がります。
図2は、Typhoon HIL HIL604でシミュレーションされたドライブトレインモデルの概要を示しています。このモデルは、HTWザールでの初期論文で開発された電気自動車のサンプルモデルをベースに、ラーフェンスブルク=ヴァインガルテン大学の詳細なバッテリーおよびバッテリー管理システム(BMS)モデルで拡張されています。3相インバータと非同期モーターは、Typhoon HILライブラリから取得したモデルです。図2に示されているコンポーネントに加えて、フィールド指向制御、CANトランシーバー、およびレシーバーもHILデバイス上に表現されています。
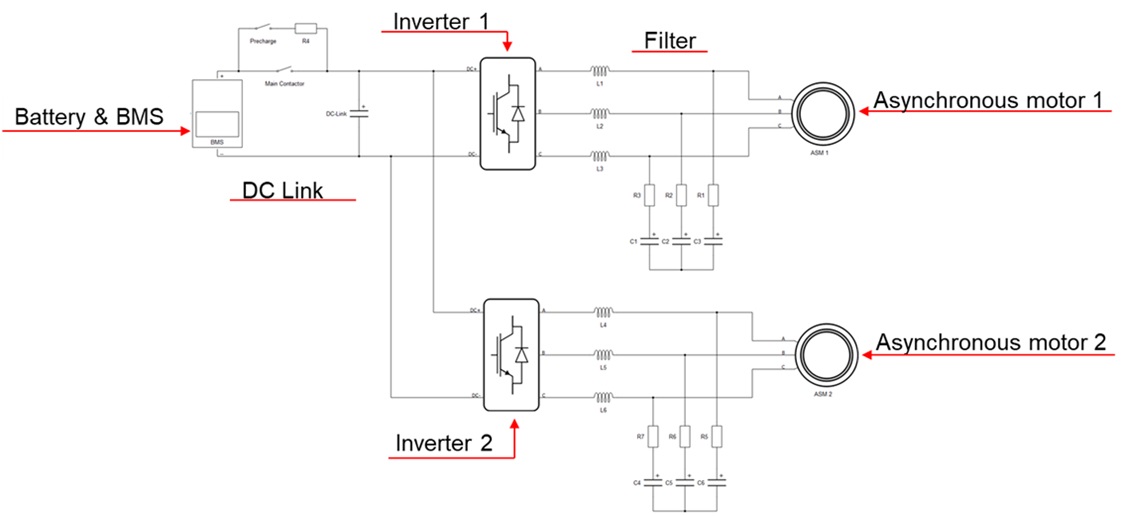
このバッテリーモデルは、 Typhoon HILバッテリーセルモデルを用いて、容量103.55 kWhの400Vリチウムイオンバッテリーを表しています。バッテリーは2つのストリングで構成され、各ストリングは3つのバッテリーモジュールで構成されています。各モジュールは、直列接続された32個のセルと並列接続された9個のセルで構成されています。さらに、個々のセルを変更する機能が2つのモジュールに統合されています。この機能は、後からバッテリーに障害を発生させ、CarMakerでバッテリー管理システム(BMS)と車両の応答をテストできるようにするために統合されています。
バッテリーマネジメントシステムはバッテリーを監視・制御し、各セルの電流、電圧、温度を常時監視します。これにより、深放電、過充電、過熱、短絡に対する保護が確保されます。さらに、BMSは車両の始動時に制御を行い、DCリンクコンデンサをプリチャージし、その後メインコンタクタを閉じます。
前述の通り、車両のダイナミクス、走行ルート、そしてドライバーのシミュレーションはIPG CarMakerで行われます。CarMakerは、実車とその周囲の物理特性を含む仮想的な運転シナリオの表現を容易にするシミュレーションソフトウェアです。さらに、仮想的な運転テストを実行し、様々な状況における車両の動的挙動を評価することも可能にします。IPG Movie機能は、路上における車両の挙動を視覚化します。図3は、IPG Movieで合成道路を走行するテスト車両の様子を示しています。

協調シミュレーションを実現するために、CarMakerで2つの電動マシンを備えた電動パワートレインを使用し、対応する代替モデルを作成しました。電動パワートレインはHIL(Hardware-in-the-Loop)システム上でシミュレーションされるため、この代替モデルにはリアルタイムシミュレータとの通信機能が含まれており、現在のモーター速度と負荷要求がHILに送信されます。各モーターのトルクはHIL上で計算され、CAN経由でCarMakerに送信されます。さらに、CarMakerは、前面面積、車両重量、抗力係数、タイヤタイプなど、車体に関するすべてのデータを定義します。
協調シミュレーションは、両システムの利点を組み合わせます。Typhoon HILのドライブトレインモデルは、電気部品の高精度リアルタイムシミュレーションを可能にします。CarMakerは、ドライバー、環境、そして車両のダイナミクスを精密にシミュレーションし、 IPG Movie NXで表示します。
ラーフェンスブルク=ヴァインガルテン大学の学位論文の一環として、協調シミュレーションとその利点を活用したフォールトインジェクションテストが実施されました。道路車両の安全関連電気/電子システムに関するISO 26262によれば、重大なエラーに対するシステムの応答を理解し評価することが重要です。そのため、3つの異なる障害を車両モデルに意図的に導入し、システムの障害に対する反応を評価しました。ドライブトレインの電気部品の応答と、さまざまな運転条件下での車両の動的応答がテストおよび分析されました。HIL SCADAを使用すると、組み込まれた障害をワンクリックで有効化または無効化し、監視できます。たとえば、バッテリー内のセルの温度を変更し、この温度変化に対するバッテリー管理システム(BMS)の応答をテストできます。詳細な障害シナリオと分析については、参考文献をご覧ください。
このように、Typhoon HILとIPG CarMakerの協調シミュレーションとフォールトインジェクションテストを組み合わせることで、ISO 26262に準拠した機能安全に貢献できることが実証されています。この方法は、電動ドライブトレインの評価と最適化の新たな可能性を切り開くだけでなく、さまざまなテスト構成とエッジケースのリアルタイムテスト、評価、視覚化を可能にし、車両の開発と検証に新たな機会をもたらします。
参考文献
- Riedel, J.、「Aufbau und Implementierung einer echtzeitfähigen SiL Co-Simulation eines Batteryelektrischen Fahrzeugmodells」修士論文、HTW ザール、2022 年。
- Konzept, A.、「BEVフォールトインジェクションテストのためのHILベースのリアルタイム協調シミュレーション」、SAEテクニカルペーパー2023-24-0181、2023年、https://doi.org/10.4271/2023-24-0181
クレジット
著者| アンジャ・コンセプト
ビジュアル|アニャ・コンツェプト、カール・ミッケイ
編集者| デボラ・サント