はじめに| マイクログリッド&DERコントローラーシンポジウム
2017年のマイクログリッド&DERコントローラシンポジウムでは、MITリンカーン研究所のエリック・リンペッカー氏の発明品である超高忠実度コントローラ「ハードウェア・イン・ザ・ループ(HIL)」が注目を集め、その魅力は目覚ましいものでした。出席したすべての電力技術者の心を掴みました。
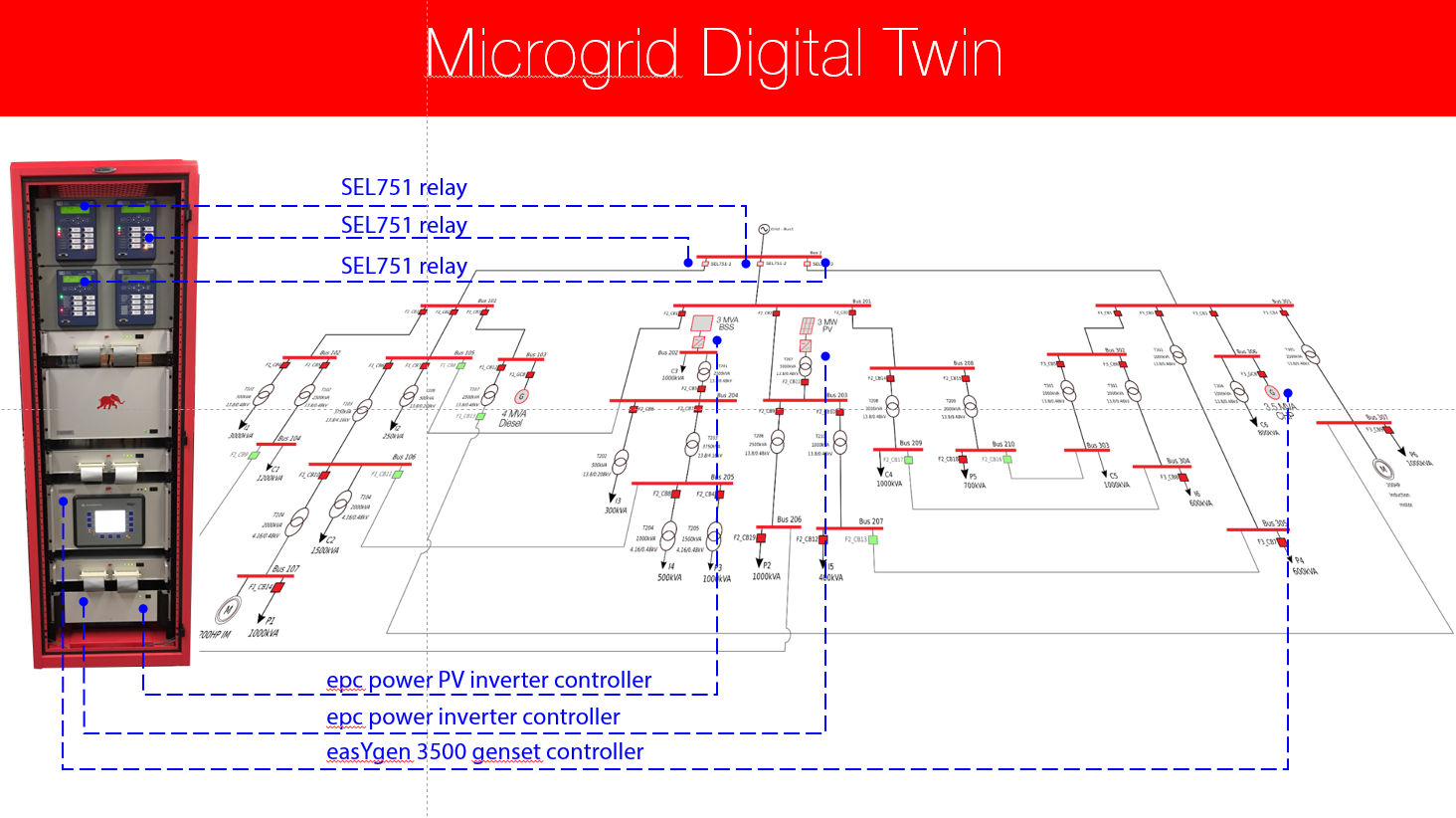
ワークショップの中央ステージでは、イートン、GE、SEL、シュナイダーエレクトリックの、本物の産業用マイクログリッドコントローラが稼働していました。これらのコントローラは、24本のバスを備えた3本のフィーダー、ディーゼル発電機1台、熱電併給天然ガス発電機1台、蓄電池、太陽光発電インバータ、そして多数の負荷で構成されるリアルタイムシミュレーションを実行するマイクログリッドコントローラ-HILテストベッドと直接インターフェースし、制御していました。
マイクログリッド コントローラは、さまざまな障害、放射照度プロファイル、負荷プロファイル、マイクログリッド コントローラへの配電管理システム (DMS) 要求 (有効電力/無効電力をアイランドにエクスポートするなど) などのさまざまな障害を含むさまざまな障害に対処する必要がありました。
シンポジウムのデモの準備としてマイクログリッド コントローラ ベンダーと協力しながら、私たちは将来の設計、テスト、検証、統合の負担を軽減するのに役立つ 6 つの重要な教訓を学びました。
- HIL を使用せよ。
- シンプルに始めましょう。
- HIL モデルとの通信を構成およびテストします。
- 実際のコントローラーをループ内でテストして、信頼を構築します。
- 徹底的にテストする。
- マイクログリッド コントローラーのサイバー セキュリティをテストします。
1. HILを使うべし
マイクログリッドコントローラの設計とテストは、それ自体が困難です。適切なツールがなければ、マイクログリッドコントローラの設計とテストはほぼ不可能です。現在、HILプラットフォームを持たないベンダーによるマイクログリッドコントローラの設計、テスト、およびコミッショニングは、次のような状況になっています。
- オフライン シミュレーター (通常は定常状態の電力フロー計算) を使用して電力ステージをシミュレートし、保護設定を取得します (限定された定常状態分析に基づく)。
- オフライン シミュレーションの結果を出発点として、マイクログリッド コントローラーをプログラムおよび構成します。
- 現場に行って、マイクログリッド コントローラーを動作させてみます。
- 現場での試運転中に、マイクログリッド コントローラと DER 間の通信に取り組みます。
- 基本的なコントローラーの機能と保護をテストし、マイクログリッドを試運転します。
- マイクログリッドがダウンしたという電話があまり早く来ないことを祈ります。
HIL マイクログリッド テストベッド コントローラーの設計とテストでは、プロセスは大きく異なります。
- マイクログリッド電力ステージ モデルを構築し、仮想 HIL またはオフライン シミュレータを使用して主要なマイクログリッド パラメータを取得します。
- 個々のDER(分散型電源装置)用のユニットテストHILモデルを使用して、マイクログリッドコントローラの通信を構成およびテストします。DERを1つずつ設定します。(しかも、快適なオフィスの暖かさを楽しみながら、これらすべてを実行できます。)
- マイクログリッドのリアルタイム HIL モデルを使用して、完全なマイクログリッド コントローラーをテストします (ループ内に実際のコントローラーは含まれません。コントローラーを含むマイクログリッド全体がシミュレートされるため)。
- ループにコントローラーを1つずつ追加し、テストを継続します。コントローラーの基本的な機能と保護機能から、複雑なモード切り替えなどまで、テストを進めます。
- 気軽にマイクログリッド サイトにアクセスし、サイト コントローラーにコントローラー ファームウェアをダウンロードして、自信を持ってマイクログリッド コントローラーの試運転を完了します。

2.シンプルに始める
マイクログリッドは複雑なシステムです。マイクログリッドコントローラと分散電源(DER)およびリレー間の通信は複雑(複数の通信プロトコル)で標準化が不十分であり、一方で発電機や負荷の動的な動作が複雑なシステム動作を引き起こします。
したがって、制御の設計とテストを行う際には、まず単一のDERモデル(例:蓄電池、発電機など)から始め、通信のテスト、測定値のキャリブレーション、設定基準値のテスト、およびトグル状態のテストを実施する必要があります。その後、同じシンプルなビルドレベル0のユニットテストを用いて、ダイナミクスのテストに移行します。
3. HILモデルとの通信を設定およびテストする
マイクログリッドの構成要素(DERやリレーの動的モデルを含む)については、検証済みの超高忠実度モデルが不可欠です。超高忠実度シミュレーションモデルには、2つの側面があります。
- コミュニケーションモデルの忠実度、そして
- 動的モデルの忠実度。
4.実際のコントローラーをループ内でテストして自信をつける
すべてのユニット テストが完了し、通信プロトコルが稼働し、完全に検証されたら、ビルド レベル 1 (BL1) モデルに進みます。
ビルドレベル1とは、シミュレーションのループに実際のコントローラが組み込まれていることを意味します。例えば、ループに実際のリレー、実際のインバータコントローラ、実際の発電機コントローラなどを含めることができます。
5.徹底的にテストする
ビルド レベル 0 およびビルド レベル 1 モデルを使用してマイクログリッド コントローラーを構築およびテストしたら、包括的なシステム レベルのテストに進む準備が整います。
このフェーズでは、障害シナリオ、さまざまなシステム障害、さまざまな負荷および放射照度プロファイルを含む自動テスト シーケンスのライブラリの構築を開始します。
6.マイクログリッドコントローラのサイバーセキュリティをテストする
試運転前の最終段階は、マイクログリッドコントローラーと通信サイバーセキュリティのテストです。コントローラーハードウェアインザループは、サイバーセキュリティとセキュリティ侵害の潜在的な影響をテスト・検証するのに最適なテストベッドです。
実際、すべてのコントローラがループ内にあるため、通信および制御アーキテクチャは最終的なハードウェア実装と同一です。したがって、コントローラHILはサイバーセキュリティのテストと検証に最適なサンドボックスを提供します。
結論| 興味深い時代に生きられますように
私たち文明は、電気エネルギーの生産、配給、そして利用の方法を根本から見直す、大規模な変革の始まりに過ぎません。実際、私たちは分散型エネルギー資源の統合、再生可能エネルギー発電の導入、そして高度な分散制御と調整を通じて、エネルギーネットワークをより回復力があり、より柔軟で、より持続可能なシステムへと変革しつつあります。
これらの目標を達成する唯一の方法は、超高忠実度ハードウェア・イン・ザ・ループ (HIL) リアルタイム シミュレーションを含む新しい電子設計自動化 (EDA) ツールを迅速に導入することです。
クレジット
著者| イヴァン・チェラノヴィッチ
ビジュアル| 台風HIL
編集者| デボラ・サント