詳細な説明
HIL CCSインターフェースの詳細な説明
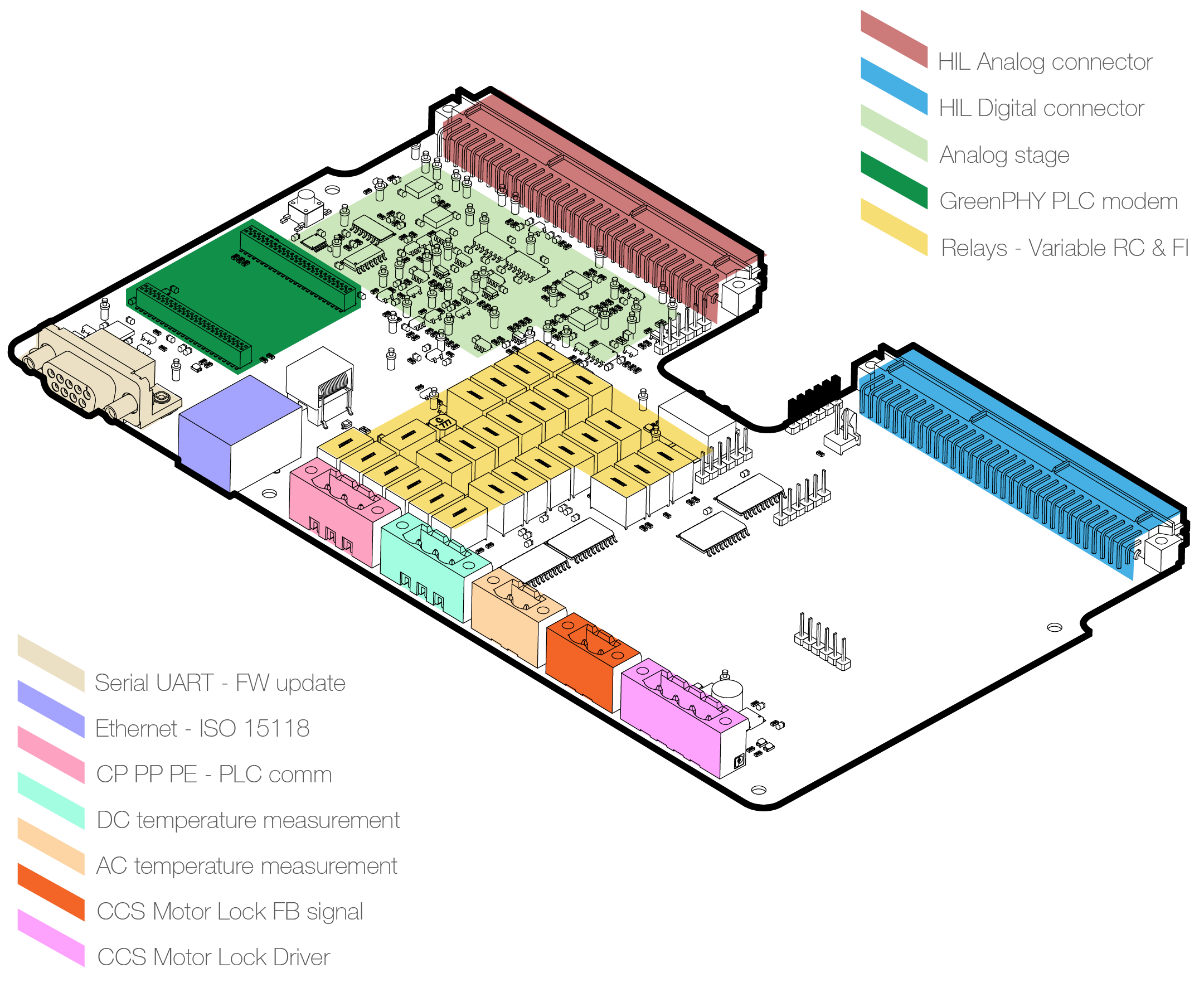
HIL CCSインターフェースレイアウト
図 1に示すように、ボードには次の主要なセクションがあります。
- HILアナログコネクタ
- HILデジタルコネクタ
- アナログステージ
- GreenPHYモジュール
- 抵抗器とコンデンサのエミュレーション
- ファームウェアアップデート用のUART
- 10/100 Mbps ファストイーサネット
- CCS CP-PP-PE信号
- DCピンの温度測定
- ACピン温度測定
- モーターロックフィードバック
- モーターロック制御ドライバー
物理的なインストール
GreenPHYモジュールはCCSインターフェースボードに既に搭載されています。これは、EVまたはEVSE向けに事前に要求された構成で出荷されます。構成をさらに変更したい場合は、Qualcomm Atheros Open Powerline Toolkitのplctoolライブラリを使用して、Ethernet経由で行うことができます。
通信接続
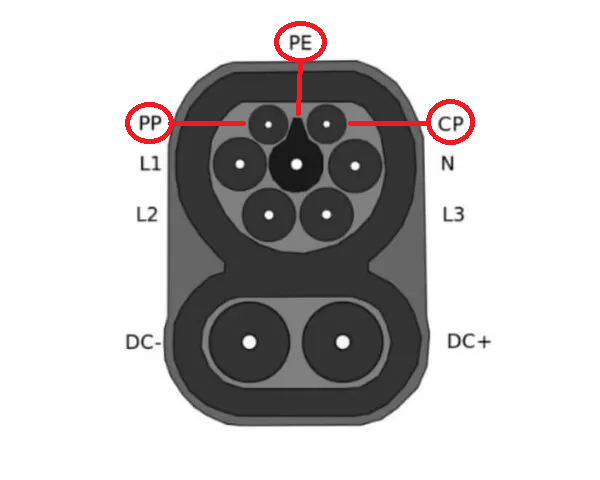
ISO 15118 車両とグリッド間の通信をテストするには、充電プラグの次の端子 (図 2など) を CCS インターフェイスの対応する CP PP PE - PLC コネクタに接続する必要があります。
- コントロールパイロット(CP)
- 近接パイロット(PP)
- 保護アース(PE)
以下の充電プラグへの接続がサポートされています。
- CCSコンボタイプ1
- CCSコンボタイプ2
- J1772
- メネケス型2
- スーパーチャージャー
イーサネット接続
変換された PLC 信号を Typhoon HIL シミュレータ デバイスに接続するために、RJ45 コネクタが GreenPHY モジュールの近くのインターフェース ボードに直接配置されます。
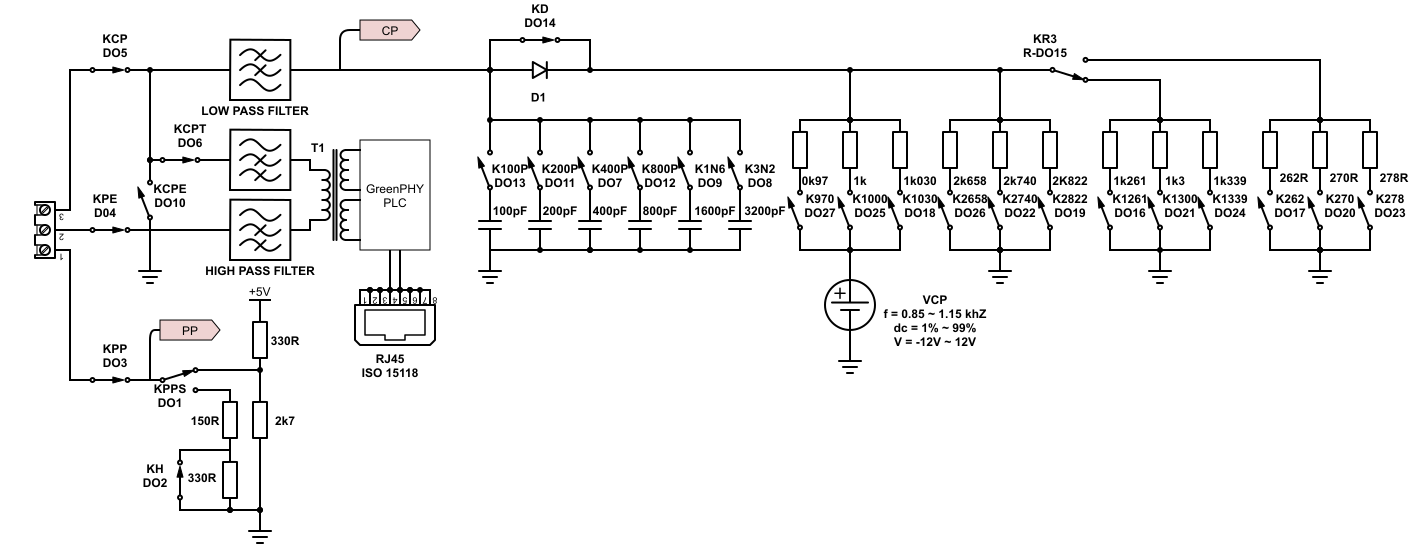
信号パスの切り替え
図3は、様々な信号経路とスイッチングオプションを示しています。Typhoon HIL CCSインターフェースには、電気自動車供給装置(EVSE)または電気自動車(EV)のいずれかをシミュレートする回路が搭載されています。これら2つの可能性を切り替えるには、該当するリレーを切り替えることで信号経路を設定する必要があります。リレーの回路図に付された番号は、HILデバイスからのどのデジタル出力がそれぞれのリレーに関連付けられているかを示しています。図に示されている位置は、HILデバイスからの刺激がないデフォルトの構成です。
パラメータの刺激
PWM通信の刺激パラメータ(周波数、デューティサイクル、正制御パイロット電圧、負制御パイロット電圧)はアナログ出力を介して制御され、Typhoon HIL Control Centerのモデルから制御できます。すべてのPWMパラメータと近接接点の測定値は、アナログ入力として利用できます。あるいは、 PWMモジュレータコンポーネントを使用して、Typhoon HIL Control CenterからPWM信号を直接生成することもできます。これらの値はCCSボード内のアナログ回路によって測定され、表1に示すようにDC電圧値に変換されます。リレーはデジタル出力を介して制御可能です。
| 設定 | アナログ/デジタルIO | 読み書き | 実際の値(HIL IO) | 変換された値 |
|---|---|---|---|---|
| リレー機能 | DO1 … DO27 | W | 0 = 開いている、1 = 閉じている | -- |
| PP電圧測定 | アナログ入力6(AI6) | R | 0 ... 5V | -- |
| CP PWM周波数測定 | アナログ入力4(AI4) | R | 0.25V ... 2.5V ... 3V | 100Hz … 1000Hz … 1200Hz |
| CP PWMデューティサイクル測定 | アナログ入力5(AI5) | R | 0V ... 10V | |
| CP PWM高電圧測定 | アナログ入力1(AI1) | R | 0V ... 10V | |
| CP PWM低電圧測定 | アナログ入力2(AI2) | R | 0V ... 10V | |
| CP PWM周波数刺激 | アナログ出力4(AO4) | W | -10V ... 0V ... 10V | 850 Hz … 1000 Hz … 1160 Hz |
| CP PWMデューティサイクル刺激 | アナログ出力3(AO3) | W | -9.95V ... 0V ... 9.95V | 1.5% … 50% … 99% |
| CP PWM高電圧刺激 | アナログ出力2(AO2) | R | 0V … 5V … 10V | 0V … 5V … 15V |
| CP PWM低電圧刺激 | アナログ出力1(AO1) | R | 0V … 5V … 10V | -5V … -10V … -15V |
故障シミュレーション
CCS モジュールには、さまざまなエラー シミュレーションとパラメータ変動機能が備わっています。
- 断線シミュレーション
- 制御パイロット(CP)と保護接地(PE)間の短絡のシミュレーション
- PWM周波数、PWMデューティサイクル、PWMハイレベルとローレベルの変動
- 容量性負荷の変動
- 抵抗器の最小値、最大値、公称値間の変動
パラメータと値の変化範囲については、 「技術データ」セクションをご覧ください。短絡や断線、抵抗値の変化、容量性負荷のシミュレーションはリレーによって行われます。必要なリレー設定は図3をご覧ください。
CCSボードLED
アプリケーションボードには合計3つのLEDがあります。そのうち2つは電源の状態(+15Vと-15V)を示し、ボードが動作しているかどうかを示します。3つ目のLEDは、緑色のPHYモジュールとDB9コネクタの間にあり、ACTと名付けられています。ACT LEDが点灯しているときは、SLACプロトコルが動作しており、SECCとEVCCの間にイーサネットネットワーク接続があることを意味します。ACT LEDは、HILデバイスがISO 15118パケットを送受信するたびに点滅します。
コネクタと主要コンポーネント
図1はCCSインターフェースボードの主要コンポーネントを示しています。このボードはHILデバイスのIO端子に接続する必要があります。これにより、適切な電源供給と、計測、刺激、そしてコントロールパイロット、近接パイロット、リレーのスイッチングのための接続が提供されます。
CP PE PP - PLC通信プラグは、 「通信接続」セクションの説明に従って、テスト対象デバイス(EVCCまたはSECC)に接続する必要があります。RJ45 Ethernetコネクタは、下部のHIL Ethernetポートに接続します。UARTコネクタはオプションで、ファームウェアのアップデートとGreenPHYマイクロコントローラのフラッシュ書き込みに使用します。
技術データ
| パラメータ | 分 | マックス |
|---|---|---|
| 供給電圧(HILデバイスIOコネクタ経由) | 0 V | 5 V |
| 近接接触測定 | 0 V | 5 V |
| コントロールパイロットPWM刺激 | ||
| 電圧 | -15 V | +15 V |
| 頻度 | 850 Hz | 1160 Hz |
| デューティサイクル | 1.5% | 99% |
| 制御パイロットPWM測定 | ||
| 電圧 | -15 V | +15 V |
| 頻度 | 100 Hz | 1200 Hz |
| デューティサイクル | 1% | 99% |