誤作動防止機能付き距離保護リレー
障害注入を使用して 2 つのグリッドを接続する距離保護リレーのシミュレーション。
導入
距離リレーは、送電線保護に最もよく用いられる保護リレーの一種です。距離リレーは、設置側から故障箇所までのインピーダンスを測定し、測定電流と測定電圧の比の変化に応じて動作します。リレーの特性は複素Z平面で表され、送電線の特性はRX平面の原点を通る直線で表されます(図1を参照)。
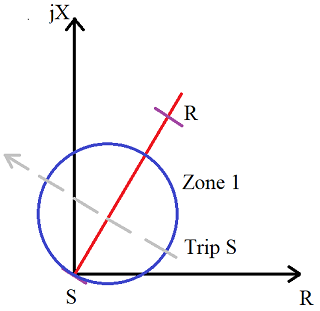
距離保護リレーにとって困難な状況の 1 つは、電力システムが大きな電力変動の影響を受ける場合です。電力変動とは、送電線上の有効電力と無効電力の変動であり、結果として故障などの大きな障害を引き起こす可能性があります。皮相電力とバス電圧の変動は、リレーによって RX プレーン上のインピーダンス変動として観測されます。インピーダンスの軌跡がリレーゾーンに入り、十分な時間そこに留まると、リレーはトリップコマンドを発行します。ソースのインピーダンスが高いほど、RX プレーン内の円が大きくなり、抵抗許容範囲が広くなります。故障箇所に抵抗が存在するだけでも距離リレーの動作に問題が生じるため、電力変動の検出は数学的形態学を適用することで解決されます。
モデルの説明
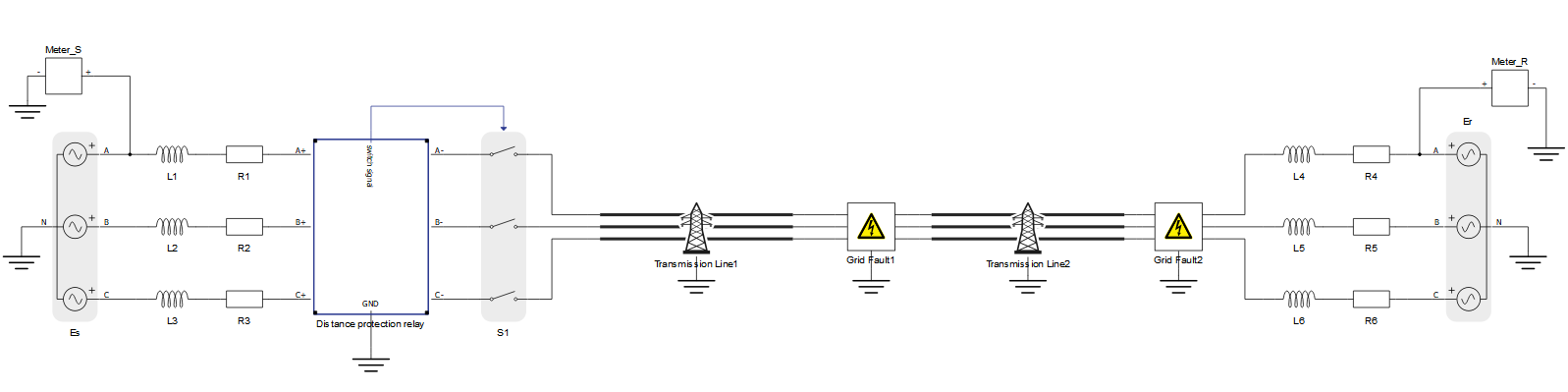
モデルの電気部分を図2に示します。図の両側には、RLインピーダンスを持つ3相グリッドが配置されています。グリッドのパラメータは、V = 230 V、f = 60 Hzです。グリッドは、長さ100 kmの送電線で接続されています。送電線には、中央の3相故障と送電線端の単相故障の2つの故障箇所があります。左側のグリッドと送電線の間には、隣接する接触器を制御する距離保護リレーが設置されています。
距離保護リレーブロックに実装されている保護ロジックには、閉路開路差演算(CODO)アルゴリズムと、トリップロジックへの入力となる測定用の故障検出機能が含まれています。詳細は図3に示されています。
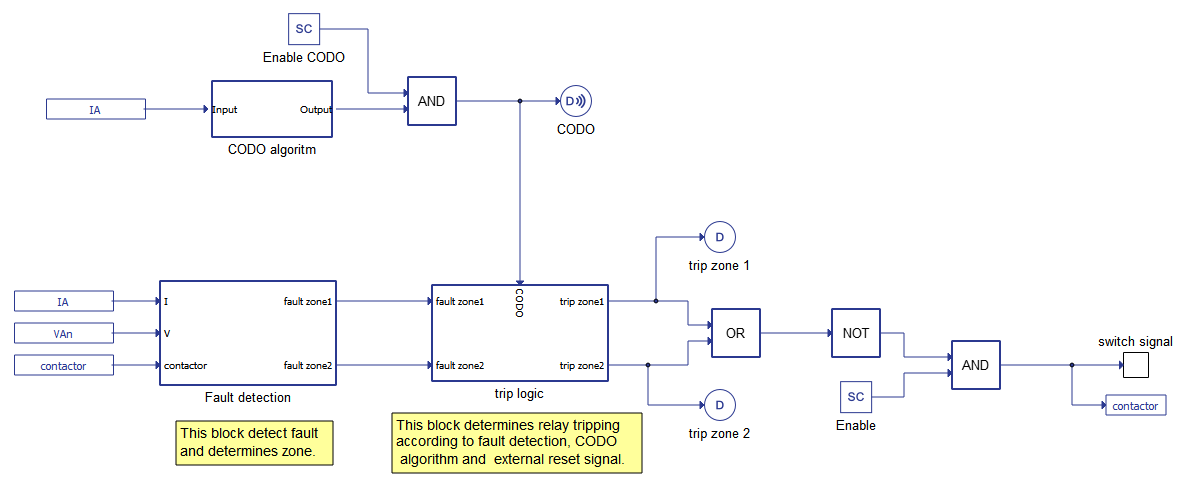
故障検出ブロックは、送電線路の故障を検出し、故障がゾーン1、ゾーン2、あるいはその両方に存在しているかどうかを判定します。故障検出ブロックは、A相の電圧と電流に基づいて故障インピーダンスを測定します。
どこ はリレーによって観測されるインピーダンスであり、 そして はそれぞれリレーによって測定された電圧と電流の RMS 値です。
複素平面上の各点は、次の式に従って R (x 軸) と X (y 軸) によって定義されます。
どこ そして はリレーによって観測される抵抗とリアクタンスであり、θV、I 電流と電圧の位相差です。
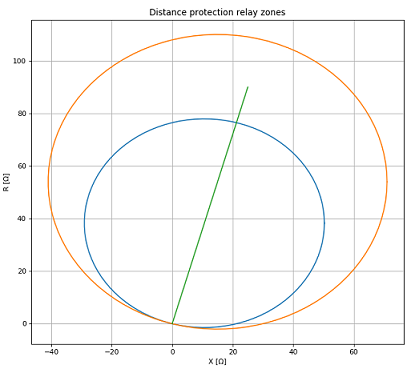
故障検出ブロックは、測定値とゾーンリーチの設定、および送電線特性に応じて、故障ゾーン1と故障ゾーン2に故障信号を出力します。距離保護ゾーンのプレビューは、図4に示す距離保護リレーコンポーネントのプレビューボタンをクリックすると表示されます。
Closing Opening Difference Operator (CODO) アルゴリズムブロックには、数学的形態学 (MM) に基づくモデルに従ってフォルトフィルタリング信号を計算するC関数ブロックが含まれています。MMは、非周期的な過渡信号のための非線形信号変換ツールです。MMで使用される数学的計算は、加算、減算、最大値、最小値の演算のみで構成されており、リアルタイムアプリケーションに適しています。MMは、膨張と収縮という2つの基本演算で構成されています。MM演算子の基本定義を以下に示します。
拡張:
侵食:
オープニング:
終わりに:
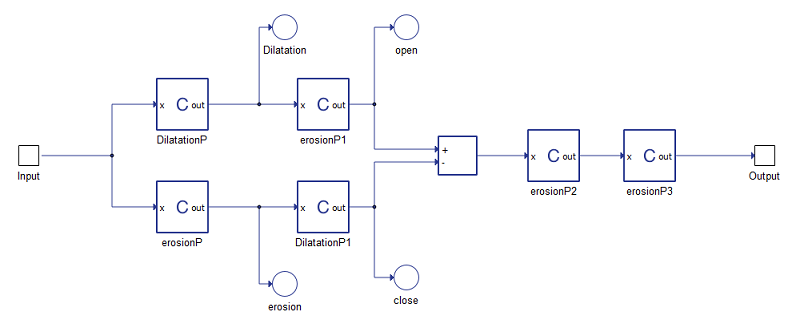
CODO信号を得るためのアルゴリズムは、式(4)、(5)、(6)、(7)を用いて構成される。モデルにおけるその実現例を図5に示す。
最後に、トリップ ロジック ブロックは、障害検出信号、CODO アルゴリズム信号、および外部リセット信号に従ってトリップ信号を計算します。
シミュレーション
このアプリケーションには、図6に示すような、あらかじめ構築されたSCADAパネルが付属しています。シミュレーション実行時の監視や操作に必要な最も重要なユーザーインターフェース要素(ウィジェット)が提供されており、ニーズに合わせてさらにカスタマイズできます。
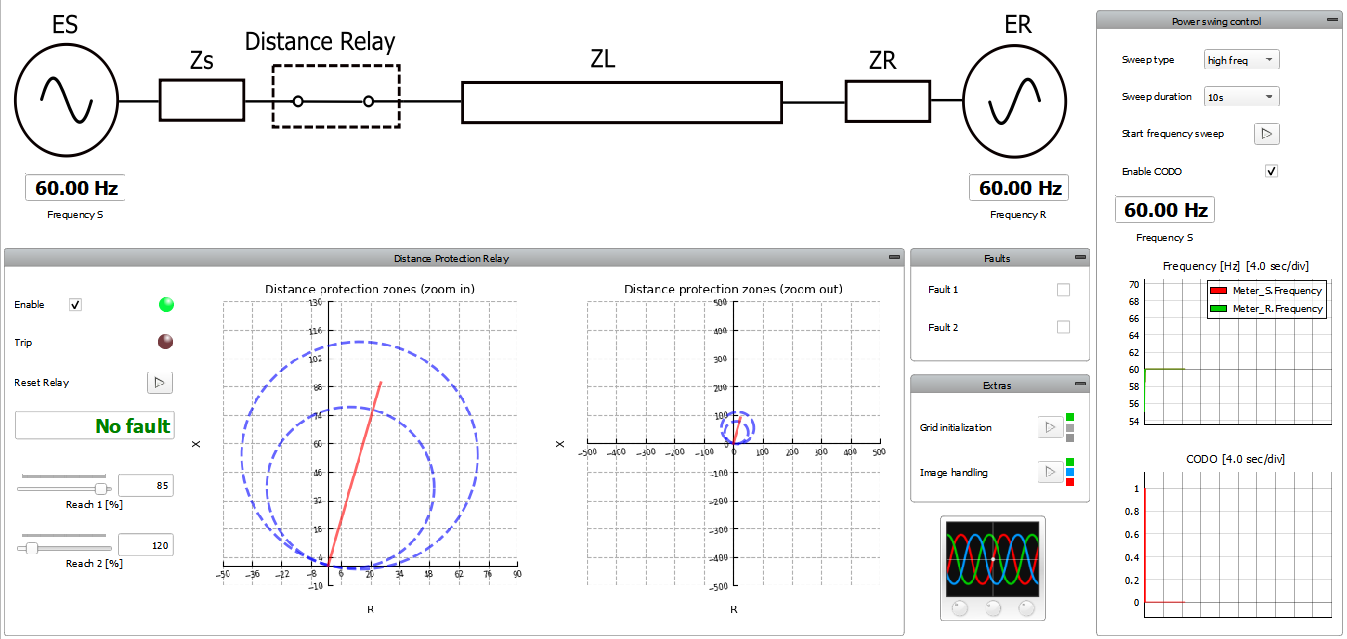
このモデルの目的は、インピーダンス値の変化に対するリレーの応答を示すことです。インピーダンス値は、系統の周波数と送電線路の故障の有無に依存します。このインピーダンスを変化させると、CODO信号が変化し、その波形をグラフで観察することができます。
SCADA パネルは 6 つの主要部分で構成されています。
- 単線結線図
- 距離保護コマンドと測定
- 欠陥
- 特典
- キャプチャ/スコープ
- パワースイングコントロール
単線系統図には、モデル値の状態(グリッド内の周波数、接触器の状態、および送電線障害の存在と場所)が表示されます。
距離保護リレー グループ内では、いくつかのアクションを実行できます。
- リレーの有効化/無効化
- 旅行状況を観察する
- リレーをリセットする
- 障害の有無を確認する
- ゾーン到達値を変更する
- インピーダンスの変化を追跡します。左の図は、ゾーン、送電線、観測された故障インピーダンスを示す拡大グラフです。右の図は、周波数変動時のインピーダンスポイントをよりよく確認できるように縮小した画像です。
障害セクションでは、挿入する障害の種類を選択できます。
- 送電線の途中における3相故障
- 送電線末端の単相故障
- 両方の障害が同時に発生
Extras グループには、グリッドの初期化と単線図のイメージの処理用のマクロが含まれています。
キャプチャ/スコープ ウィジェットでは、周波数スイープ中にグリッド電圧値を追跡したり、障害の注入をキャプチャしたり、その他の関心のある信号を観察したりできます。
パワー スイング コントロール グループでは、次の操作を実行できます。
- 周波数スイープのタイプ(高周波数または低周波数)を選択します
- 周波数スイープの持続時間を選択します(2~10秒)
- 選択したシナリオを開始する
- CODOアルゴリズムを有効または無効にする
- 両方のグリッドの周波数を観察する
- CODO信号の状態を観察する
以下の3つのシナリオは、特定の状況下での想定される動作モードと動作を示しています。以下のシナリオを正常に再現するには、モデルを開始する前に以下の手順を実行する必要があります。
- シミュレーションがまだ実行されていない場合は開始します
- リレーが無効になっている場合は有効にする
- すべての障害をクリアする
- リレーをリセットする
- 故障注入 - このシナリオを再現するには、故障1または故障2のいずれかを注入します。故障1が注入された場合、距離リレーが瞬時に(約70ミリ秒の計算遅延を伴って)コンタクタを開き、左側のグリッドを故障から切り離す様子を観察できます。故障2が注入された場合、インピーダンス測定は両方のゾーンで行われず、コンタクタは閉じたままになります。注:ゾーン2のリーチを150%以上に拡張することで、リレーをこの故障に強制的に反応させることができます。この場合、リレーは300ミリ秒の遅延時間後に反応します。
- 周波数スイープ - シナリオ2では、CODOを有効または無効にして(スイープの種類と期間を任意に選択)、周波数スイープを開始します。CODOを有効にすると、左側のグリッドで周波数が変化し、CODO信号は0と1を交互に変化し、リレーの誤作動をフィルタリングします。CODOアルゴリズムが無効になっている場合、リレーはグリッドに障害があると誤って判断し、コンタクタを開きます。注意:スイープ時間が短いシナリオでは、CODOを無効にしてもリレーが反応しない場合があります。これは、測定されたインピーダンス値が急激に変化し、リレーが障害状態を検出できないためです。
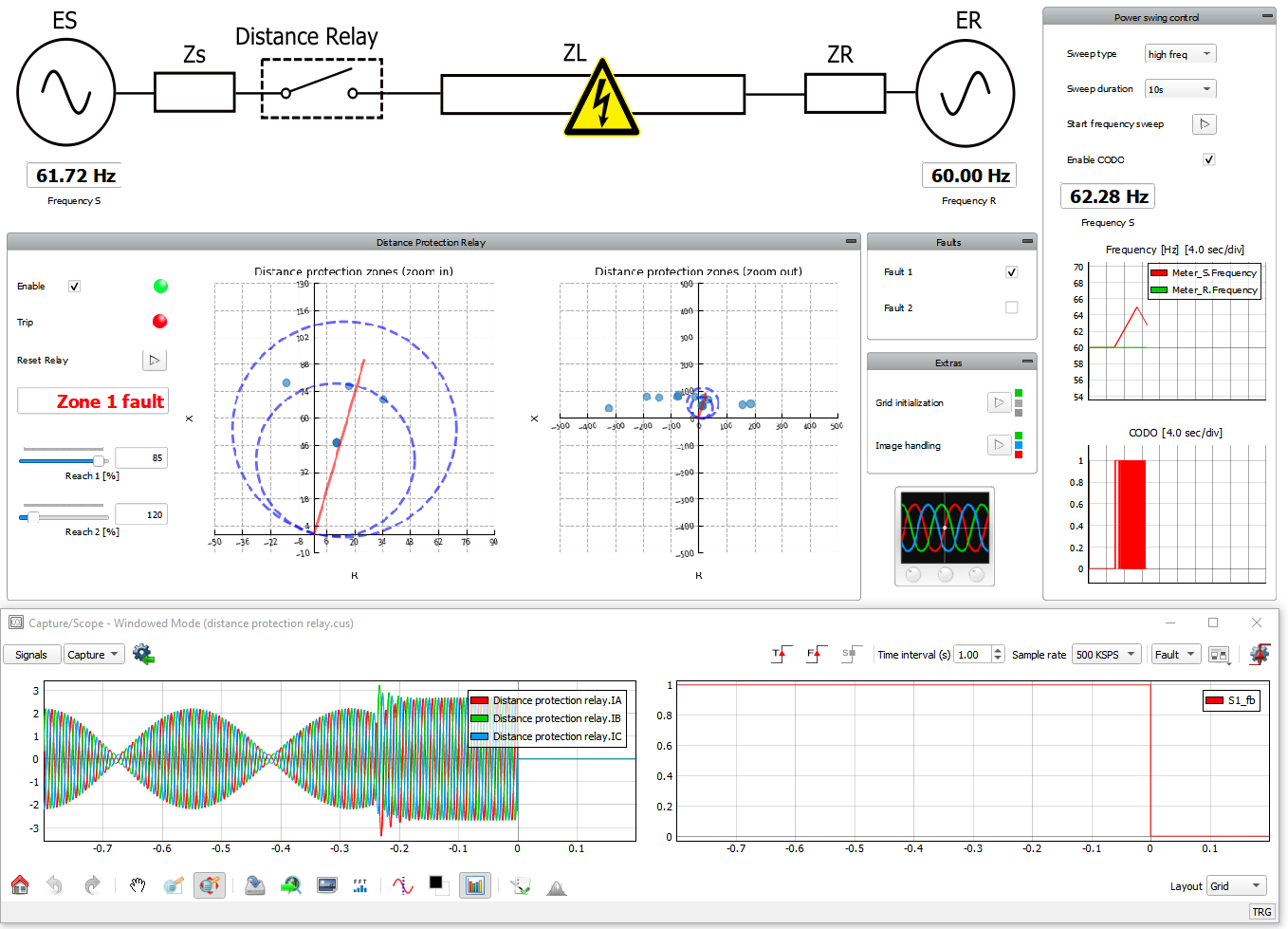
- 周波数スイープによる故障注入 - この場合、キャプチャ/スコープで開始トリガーをアクティブ化するのが最適です。その後、CODOを有効にした状態で周波数スイープシナリオ(できれば長めのもの)を開始し、シナリオ終了前に故障1を注入します。図7の結果から、リレーが適切に反応し、故障がゾーン1内にあることを検出したことがわかります。このケースは、CODOアルゴリズムにより、実現リレーが周波数スイープと実際の故障の両方が同時に発生した場合でも区別できることを示しています。
このアプリケーションサンプルと対応する自動テストサンプルは、無料のVirtual HIL Deviceライセンスに含まれており、PC上でシミュレーションできます。モデルの実行に関する詳細は、サンプル要件セクションをご覧ください。
テスト自動化
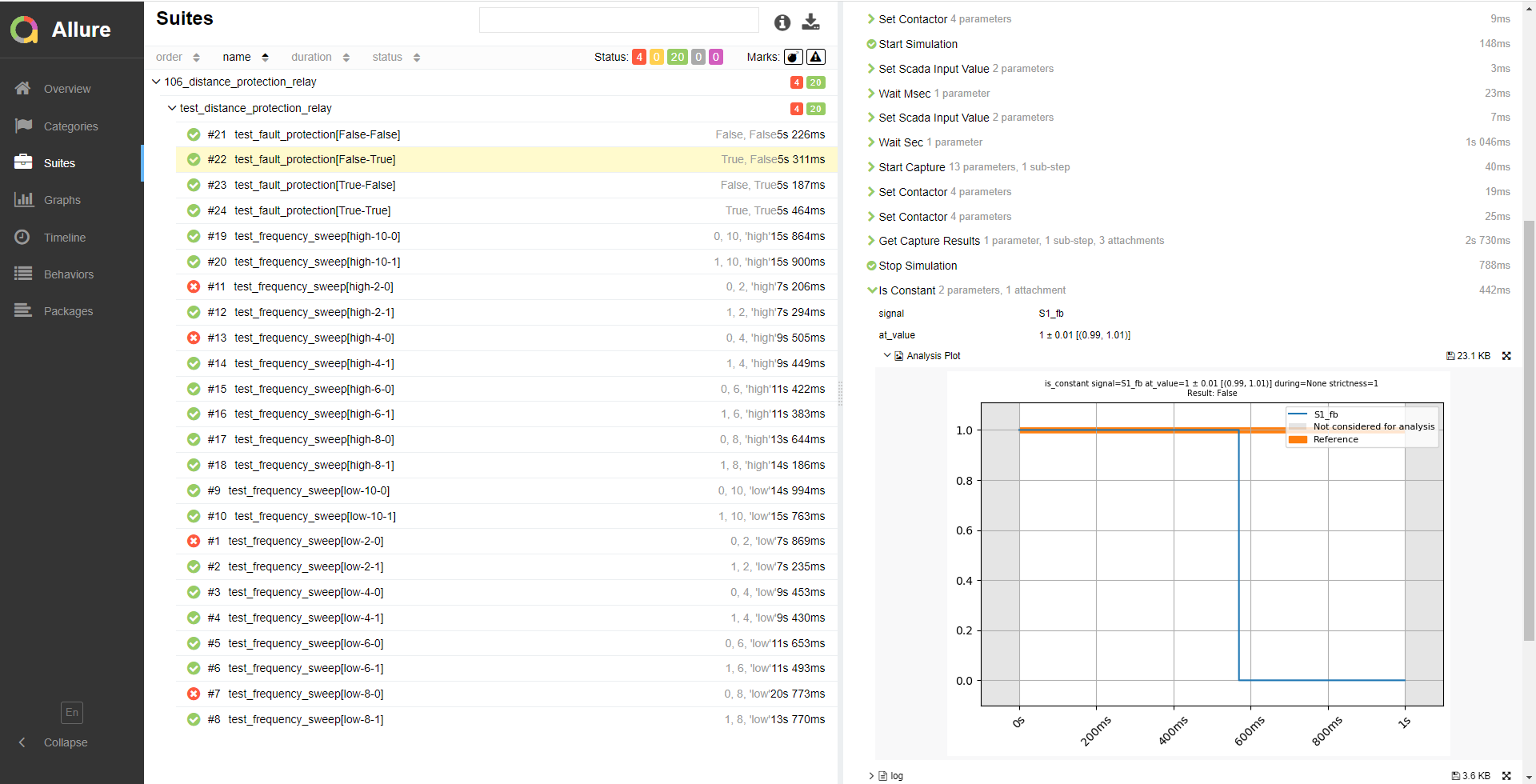
提供されているテスト自動化スクリプトは、様々な種類の障害に対する距離リレーのトリップを検証します。このスクリプトは、周波数スイープによる障害トリップをフィルタリングするためのCODOアルゴリズムを実証します。この一連のテストでは、図8のSuitesセクションに示すように、いくつかの障害が発生することが予想されます。さらに、グリッド障害に対する距離保護リレーの反応も確認します。fault_1はリレーをトリップしますが、fault_2はトリップしません。前者の場合、図8の右側のグラフに示されています。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル |
例\モデル\距離保護リレー 距離保護リレー.tse 距離保護リレー.cus 例\テスト\ 106_距離保護リレー\ テスト距離保護リレー.py |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 1 |
| 最大マトリックスメモリ使用率 | 22.85% (コア0) |
| 最大時間枠利用率 | 34.55% (コア0) |
| シミュレーションステップ、電気 | 2マイクロ秒 |
| 実行率、信号処理 | マルチレート(60 µs、600 µs) |
著者
[1] ドゥシャン・コスティッチ