IEC62196規格に準拠した電気自動車の充電 - モード3
IEC62196タイプ2コネクタを使用した電気自動車のAC充電のデモンストレーション。EV充電器とEV間の通信は、IEC 61851-1およびJ1772に準拠したControl Pilot経由のPWM信号を用いて行われます。
導入
電気自動車(EV)を充電するには、EV供給装置(EVSE)とEVの間で情報交換を行い、充電条件(例:充電電力)を定義する必要があります。この信号伝達は国際規格IEC 62196-1に基づいており、4つのモード(AC充電用に3つ、DC充電用に1つ)が区別されています。図1はこれらのモードの特徴をまとめたものです。IEC 62196は、地域に応じて使用されるコネクタも定義しています。

DC充電を適用するには、バッテリーと外部電源間での重要な情報交換が不可欠です。そのため、高レベルの通信が必要です。AC充電の場合は、パイロット信号のみが必要です。定置設置型EVSEのほとんどは、最も柔軟で高い充電電力を可能にするモード3を採用しています。このアプリケーションノートでは、IEC62196モード3に準拠したAC充電におけるコンタクトパイロット(CP)ピンの信号伝達手順について説明します。
モデルの説明
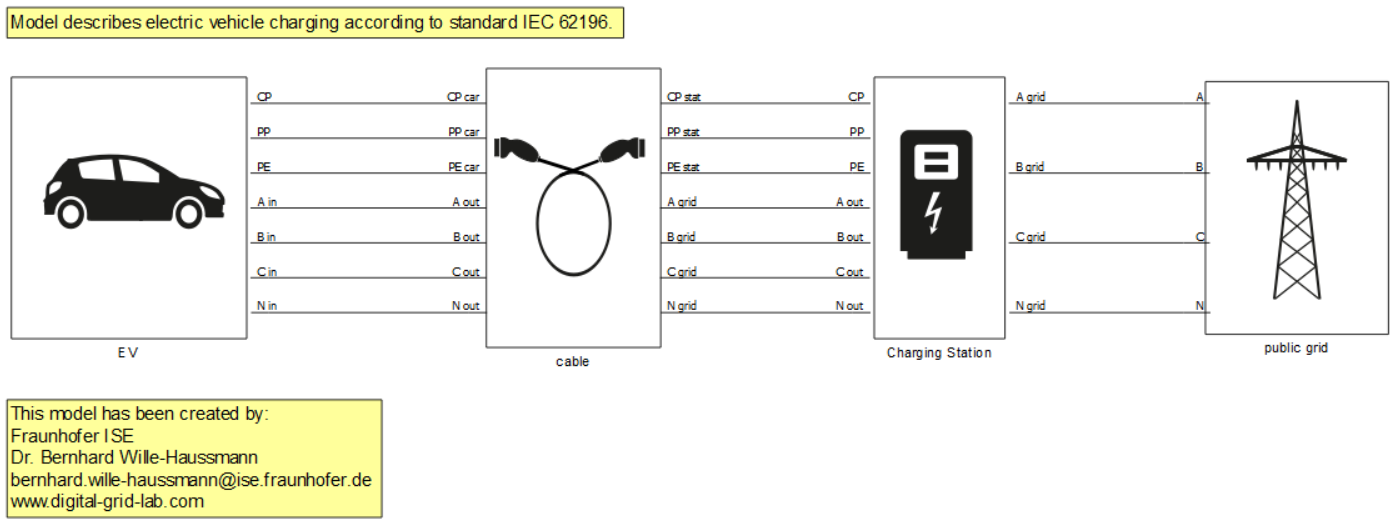
図2は、EV、充電ステーション、接続ケーブル、および公共電力系統の実装モデルを示しています。EVバッテリーは、 Battery ESS(Generic)コンポーネントを使用してモデル化されています。次のセクションでは、各コンポーネント間の信号伝達について重点的に説明します。
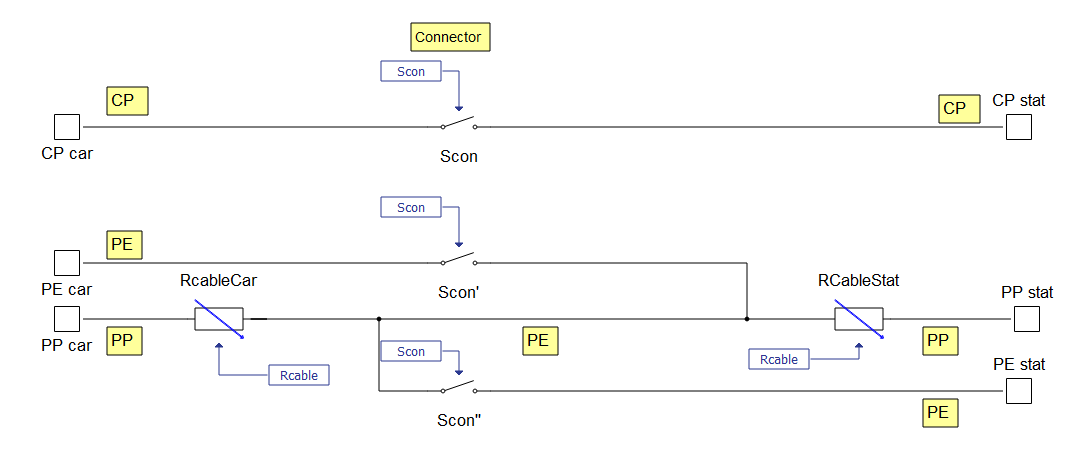
| 抵抗器PP-PE | 1500 Ω | 680 Ω | 220 Ω | 100 Ω |
|---|---|---|---|---|
| 最大電流 | 13 A | 20 A | 32 A | 63 A |
| ケーブル断面積 | 1.5 mm2 | 2.5 mm2 | 6 mm2 | 16 mm2 |
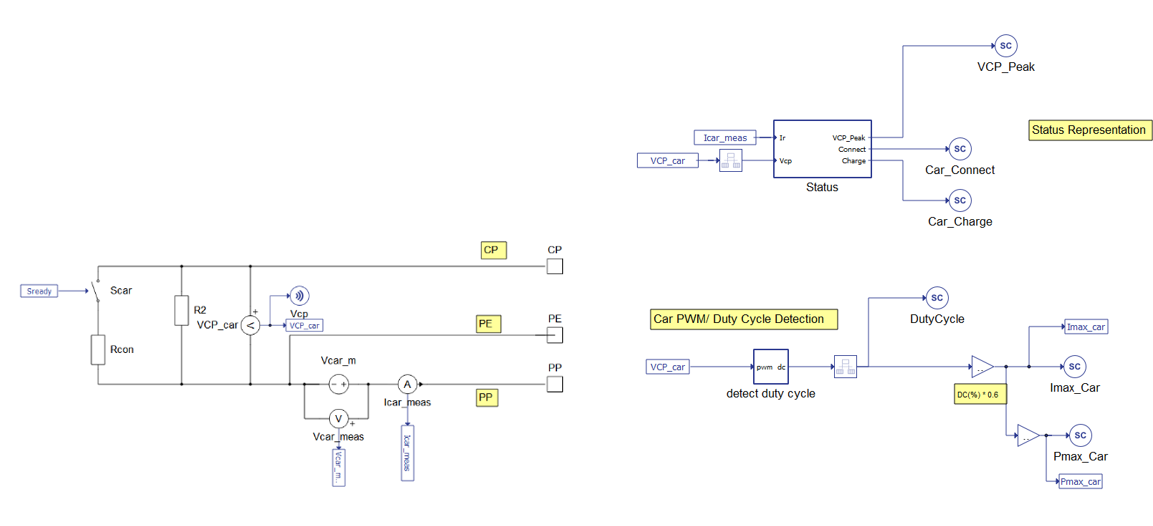
ケーブルの最大電流容量が検出された後、EV の充電要求を信号で伝える必要があります。これは CP を介して行われます。 CP ピンでは、充電ステーションは振幅 ±12 V、周波数 1 kHz のパルス幅変調 (PWM) 信号を提供します。 これは、図 4に示す回路によって EV 側で評価されます。車が接続されると、抵抗器 R2 = 2.7 kΩ が並列になり、電圧 VCP_car が 8.8 V まで低下し、接続が適切であることを示します。充電要求があると、EV は接触器 Scar を閉じ、Rcon = 1.3 kΩ が R2 に並列に接続されます。これにより、VCP_car が 5.6 V まで低下し、充電の準備が整ったことを示します。これらのステータスは、EV 側と EVSE 側で C 関数ステータスによって評価されます。EVSE によって利用可能な最大電流は、CP の PWM 信号のデューティ サイクル (DC) を介して通信されます。EV は DC を評価します。このモデルは、主にエッジ検出と積分器を用いたデューティサイクル検出サブモデルでこれを実現します。最大電流Imax_DC = 0.6 DC[%]は、DCパーセントに0.6を乗じることで計算されます。最終的に、EVSEが供給できる最大電流は、Imax_cableとImax_DCの2つの制限値の小さい方になります。
シミュレーション
図5は、前述のモデルのSCADA表現を示しています。これは、すべてのコンポーネントの設定と状態を表しています。充電ステーションでは、主にデューティサイクルの設定と、Vcpでコード化された状態の確認が可能です。ケーブルはEVを接続し、適用するケーブルの断面積を選択できます。EV側では、通常の自動車と同様のユーザーインターフェースが表示されます。さらに、充電コントローラの内部値も表示されます。これには、検出されたDC、最大電流、検出された状態が含まれます。中央のスコープには、デューティサイクル検出による検出されたエッジを含む、EV側のVcpが表示されます。
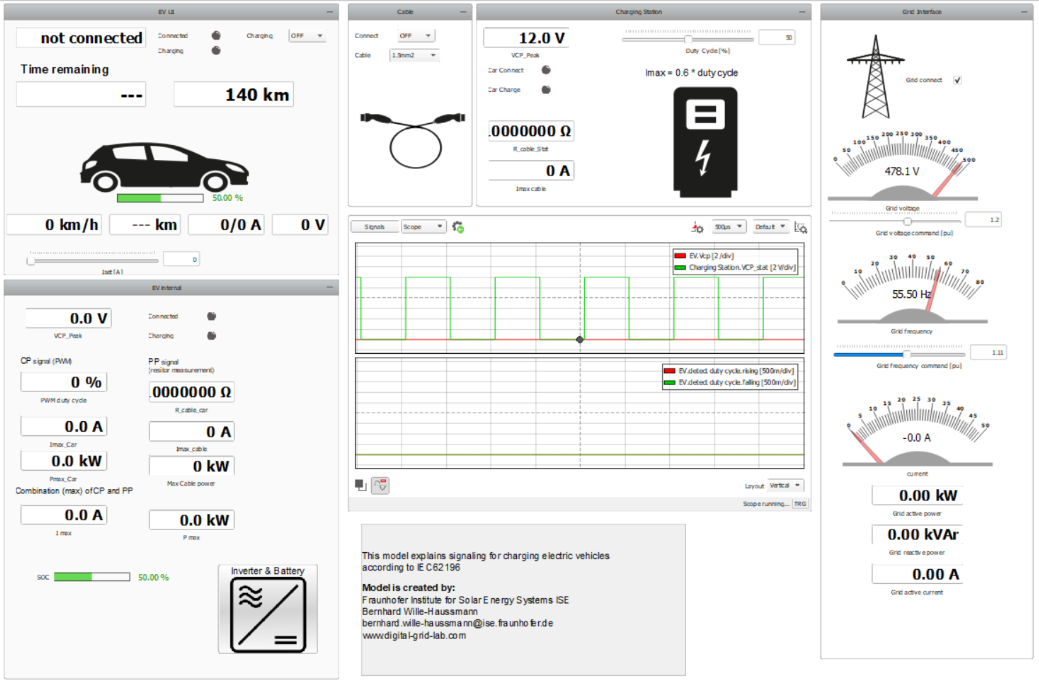
シミュレーションを開始したら、充電プロセスを開始できます。まず、EVをケーブルブロックに接続し、EV側で充電を有効にする必要があります。状態を把握するには、Vcpを観察すると役立ちます(図6 )。Vcpは12Vから始まり、接続後に8.8Vまで低下し、充電要求後には5.6Vまで低下します。
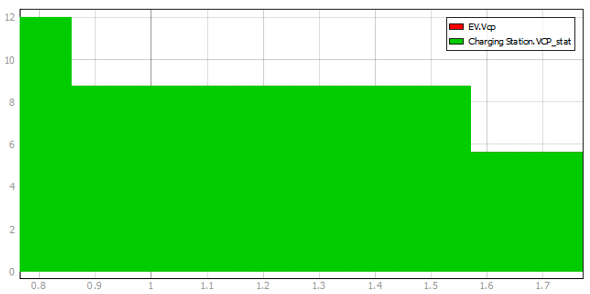
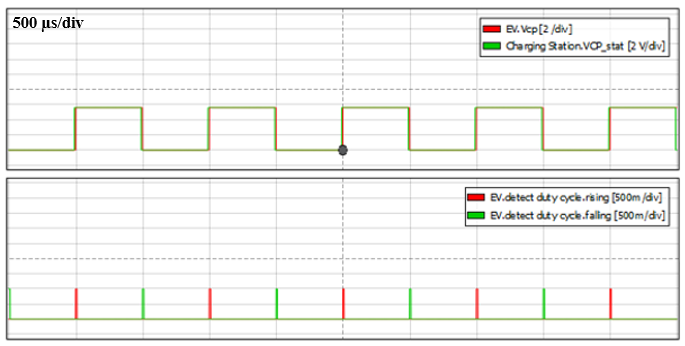
図7はEVで測定されたPWM信号を示しています。信号パターンから、オン時間とオフ時間が等しいことがわかります。したがって、デューティサイクルは50%であり、充電ステーションは最大30Aを供給できることを意味します。
SCADAのEVユーザーインターフェースで充電電流を選択すると、EVの充電状態が上昇するのを確認できます。Iset値をImax_carよりも高く設定しようとすると、設定できませんのでご注意ください。充電ステーションが最大電流を制御するため、充電インフラへの損傷を防ぎます。
テスト自動化
提供されているテスト自動化スクリプトは、次の動作モードでの EVSE のパフォーマンスを検証します。
- 車両接続の検証
- EVSEはエネルギー供給の準備が整いました
- EVはエネルギーを受け入れる準備ができている
- 複数のデューティサイクルにおけるEV電流制御許容範囲の検証
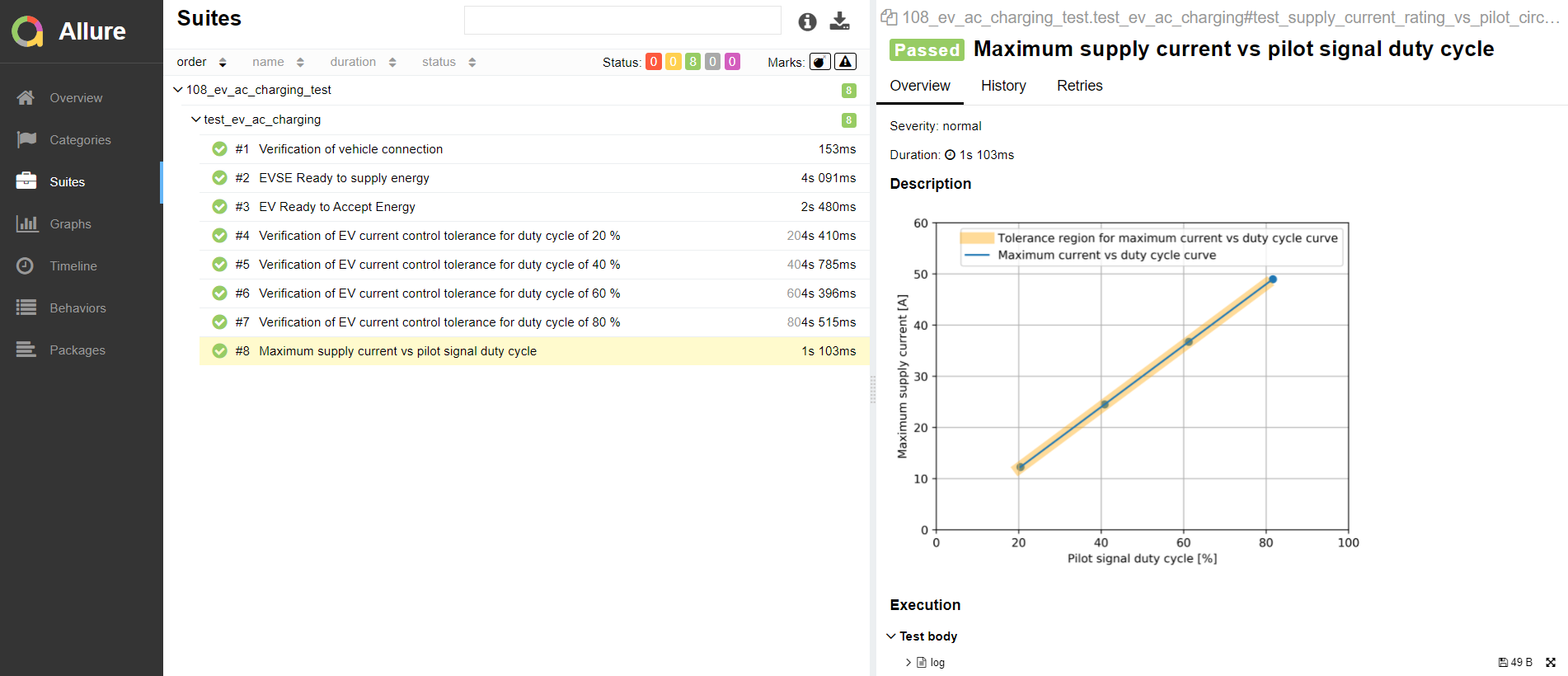
これらの動作モードをテストした後、スクリプトは最大供給電流をパイロット信号のデューティサイクルの関数としてプロットします。このプロットには許容曲線が描かれており、最大供給電流の値が期待範囲内であることがわかります。これらの曲線は両方とも図8の右側に表示されており、図の左側にはすべてのテストケースのリストが表示されています。
TyphoonTest IDE からテストを実行すると、完全なテスト レポートを取得できます (簡単にアクセスするには、サンプル エクスプローラーの [テストを開く] ボタンを押します)。
要件の例
表2は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル |
例\モデル\自動車\電気自動車のAC充電 電気自動車のAC充電.tse 電気自動車のAC充電。 \examples\tests\108_ev_ac_charging_test test_ev_ac_charging.py |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 2 |
| 最大マトリックスメモリ使用率 | 6.4%(コア1) 4.15% (コア0) |
| 最大時間枠利用率 | 42.27% (コア1) 19.09% (コア0) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | マルチレート(10µs、400µs) |
著者
このモデルは、フラウンホーファー太陽エネルギーシステム研究所(ISE)のデジタルグリッドラボの活動の一環として作成されました。このサービスラボでは、EVSEの試験が行われています。詳細なご質問は、以下をご覧ください。
[1] ベルンハルト・ヴィレ・ハウスマン博士、フラウンホーファーISE、系統運用・計画部長、 bernhard.wille -haussmann@ise.fraunhofer.de