電気自動車
急速DC充電器を備えた電気自動車のサンプルモデルのデモンストレーション。EVと充電器は、詳細なパワーエレクトロニクスモデルで表現されています。
導入
このモデルは、270kWの誘導モーターと250Ahのリチウムイオンバッテリーを搭載した電気自動車(EV)で構成されています。175kVAのバッテリーチャージャーは、マイクログリッドライブラリのバッテリーインバータコンポーネントを使用して実装されており、車両対グリッド、グリッド対車両、および無停電電源装置(UPS)の運用におけるグリッドフォーミングモードと追従モードをサポートしています。パワートレイン制御モジュール(PCM)は、回生ブレーキ機能を備えたフィールド指向制御(FOC)方式に基づいています。モデルには、UPSモードをシミュレートするための20kVA負荷が含まれています。これは、バッテリーインバータをグリッドフォーミングモードに切り替え、グリッドから切断することで実行されます。
このアプリケーションサンプルモデルは、ドライブトレインやバッテリーコンバータに関して特定のメーカーのトポロジを実装したものではありません。むしろ、すぐに使用可能なパワーエレクトロニクスおよびマイクログリッドコンポーネントを使用して、高忠実度のシステムレベルアプリケーションを構築する方法を示しています。このサンプルを使用するには、リアルタイムシミュレーション用のMicrogridツールボックスへのアクセス権を持つライセンスが必要です。
モデルの説明
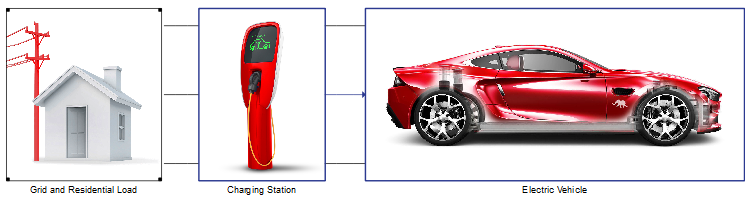
このモデルは、次の 3 つの主要なサブシステムで構成されています。
- 電力系統と住宅の負荷
- 充電ステーション
- 電気自動車
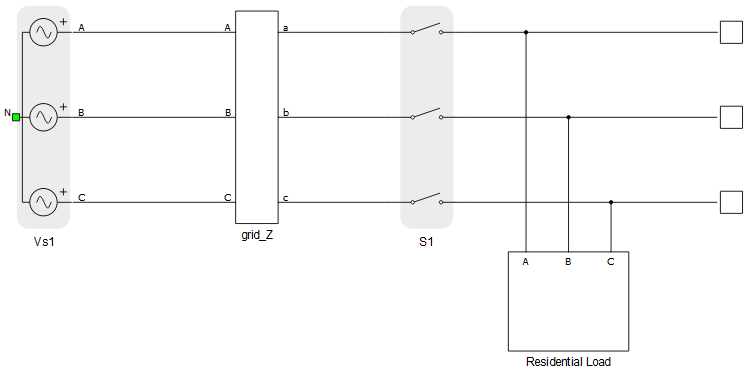
三相電力系統は、240 V / 60 Hzの電圧源とRLセクションのインピーダンスで構成されています。図2に示すように、電力系統はコンタクタS1によって回路の他の部分に接続されています。コンタクタの隣には20 kVAの負荷があり、これは電力系統または車両バッテリーから電力を供給できる家庭用負荷を表しています。
- リチウムイオン電池
- LCフィルタ付き三相インバータ
- 誘導モーター
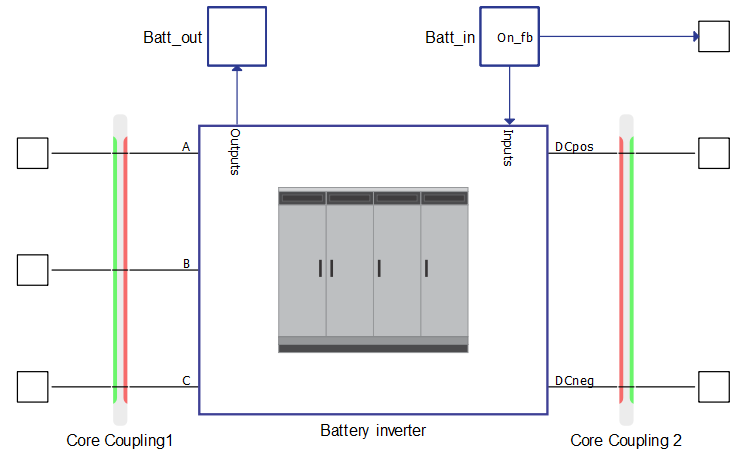
バッテリーインバータ(図3 、コアカップリングの右側)は、マイクログリッドライブラリのコンポーネントであり、系統追従モードと系統形成モードの両方で独自の制御機能を備えた完全なスイッチングモデルとして実装されています。インバータを175 kVAにスケールダウンするために、コンポーネントモデルはそのまま維持され、マスクレベルのパラメータのみが変更されています(表1 )。
| パラメータ | 新しい価値観 | デフォルト値 |
| 公称電力 | 175kVA | 1.6 MVA |
| 公称電圧 | 240 V | 480 V |
| 公称DCリンク電圧 | 400 V | 10kV |
このモデルで紹介されている EV は、次のパラメータを持つバッテリーを使用して実現されています。
| タイプ | リチウムイオン |
| 公称電圧 | 400 V |
| 容量 | 250Ah |
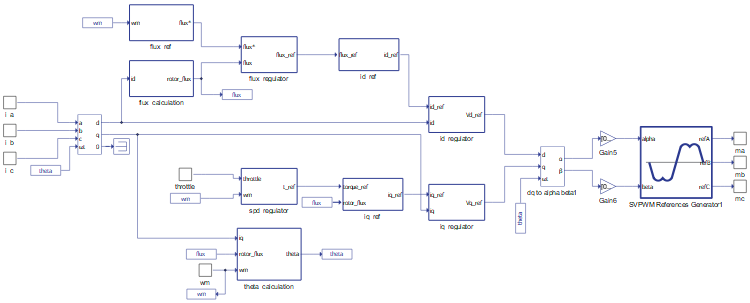
電気自動車サブシステムは、EVモデル、接続ロジック、制御要素、測定デバイス、消費量計算器、および機械モデルブロックで構成されています。電気自動車モデルを図4に示します。三相インバータコンポーネントの内部変調器を使用し、搬送周波数は20kHzに設定されています。
サブシステムが数学的にモデル化される方法の詳細な説明は以下に続き、その後にシミュレーションでの電気自動車の動作の説明が続きます。
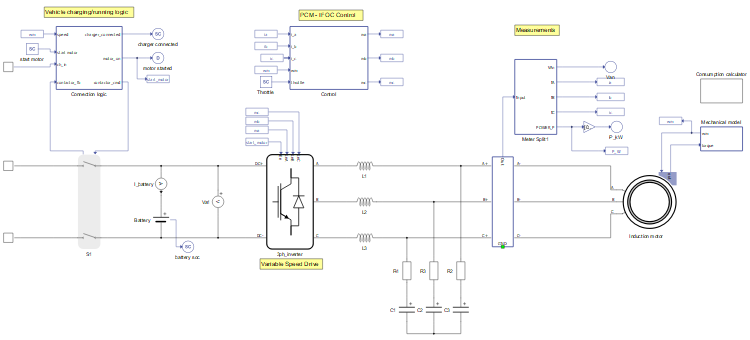
接続(車両の充電/走行)ブロックには、車両の充電ステーションへの接続と切断を行うロジックが実装されています。このブロックには以下の機能があります。
- 車両が停止している場合は、車両を充電ステーションに接続してください。
- 充電器が接続されている間、車両が充電ステーションから切断されるのを防ぎます。
- 車両走行中は充電ステーションへの接続を防止します。
- 充電器が接続されている間はモーターが始動しないようにします。
PWM基準信号ma 、 mb 、およびmc は、図5に示すPCMによって生成されます。三相メーターコンポーネントは、誘導モーターとインバーター間の電流と有効電力フローを測定するために使用されます。PCMは、測定された三相電流を直流成分(i_d)と直交成分(i_q)に変換し、PIレギュレーターで制御するという、シンプルなFOCベースの方式を採用しています。マシンフラックスはi_dに関連し、トルクはi_qに関連しています。abcからdqへの変換とdqからαβへの変換に必要なローターフラックス角度ϴ_eは、マシンの電気的パラメーター、ローター速度、および測定された電流から計算されます(間接FOC)。
モータ駆動は、表3に示すパラメータを持つ誘導機を使用して実現されます。
| タイプ | リスケージによる誘導 |
| 公称電圧 | 400 V |
| 最大出力 | 270kW |
| 最大頻度 | 565 Hz |
| 最大回転数 | 16950 |
| 極対数 | 2 |
フラックス参照はflux_refブロックで生成され、定数値として開始されます。 しかし、モータの速度が上昇すると、磁束を維持するために電機子電圧が上昇します。インバータの電圧制限に達すると、回転子速度はそれ以上上昇できなくなります。これがベース速度となります。 次に、磁束弱め法を採用して、ローターが基本速度を超えるようにします。この時点で、最大磁束基準に測定されたローター速度の逆数を乗じます。
トルク指令値は、SCADAパネルのスロットル入力からspd_regulatorサブシステム(図6 )で計算されます。スロットルは0~100の範囲の値で、この値は最高速度(250 km/h)に対するパーセンテージとして速度制御に使用されます。
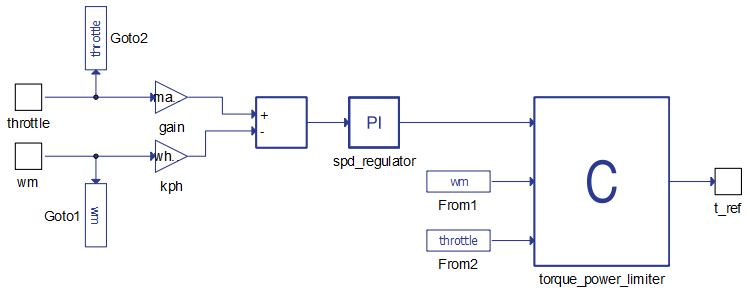
速度レギュレータの出力は基準トルクであり、これは C ブロックによってさらに処理されます。
- 加速出力を270kWに制限
- 加速トルクを860Nmに制限
- 回生ブレーキの電力を60kWに制限
- 回生ブレーキトルクを250Nmに制限
- 結果として得られるトルクをスロットル率で乗算します
誘導電動機には可変トルクが負荷されます。電動機の機械部分はニュートンの回転の法則に従います。
どこ 車両の速度です 車両の質量です。 車両の有効な機械的牽引力であり、 ブレーキ力であり、 車両に加わる荷重力の合計です。
有効な機械的牽引力は次の式で表されます。
どこ 伝達効率は 電気トルクがモーターを生み出し、 ギア比、そして 車輪の直径。
ブレーキ力は次の式で計算されます。
どこ 最大ブレーキ力のパーセンテージ(0~100)です 応用できるもの。
どこ 表面に投影された重力の要素であり、 転がり抵抗力と 風の抵抗力です。
どこ は車両の重量、αは傾斜角度です。
どこ 車両の速度は そして 転がり抵抗です。
どこ ドラッグエリアと 空気の密度です。
どこ 抗力係数であり 車両の前面面積です。
このモデルは3つのコアで動作するため、コア/デバイス結合要素が含まれます。トポロジの競合を回避するため、結合要素にはスナバが追加されます。
- コアカップリング1(内側 充電ステーション) – カップリングの赤(電流)側がコンタクタに面しているので、次のパラメータで固定 RC スナバを追加する必要があります。
- コアカップリング2(内側 充電ステーション) – バッテリーインバータ内のコンデンサを放電するために、固定抵抗スナバ 赤(電流)側に追加されます。また、カップリングの緑(電圧)側は三相インバータに面しているので、ダイナミック抵抗スナバが が追加されます。
スナバの使用とパラメータ化に関する詳しい情報は、ここを参照してください。
シミュレーション
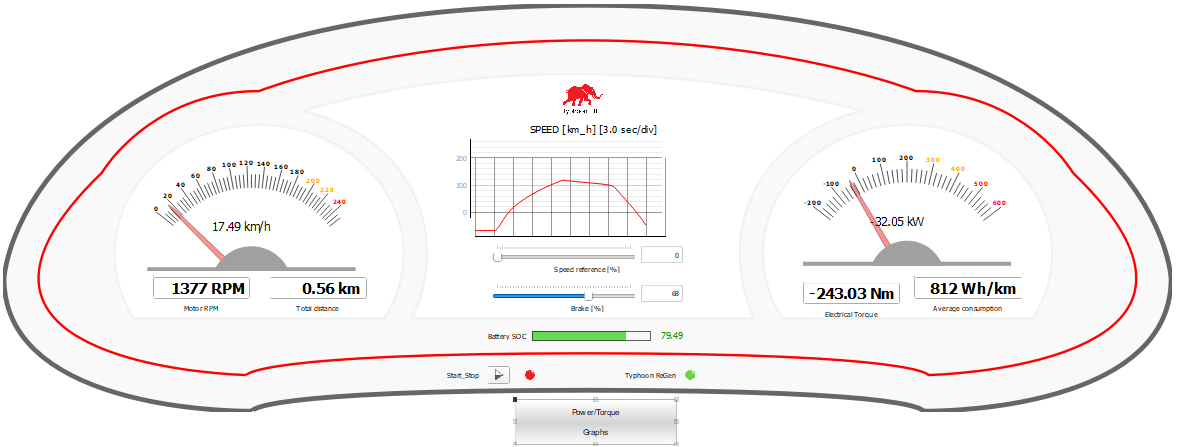
このアプリケーションには、あらかじめ構築されたSCADAパネル(図7 )が付属しています。このパネルには、実行時にシミュレーションを監視および操作するための主要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
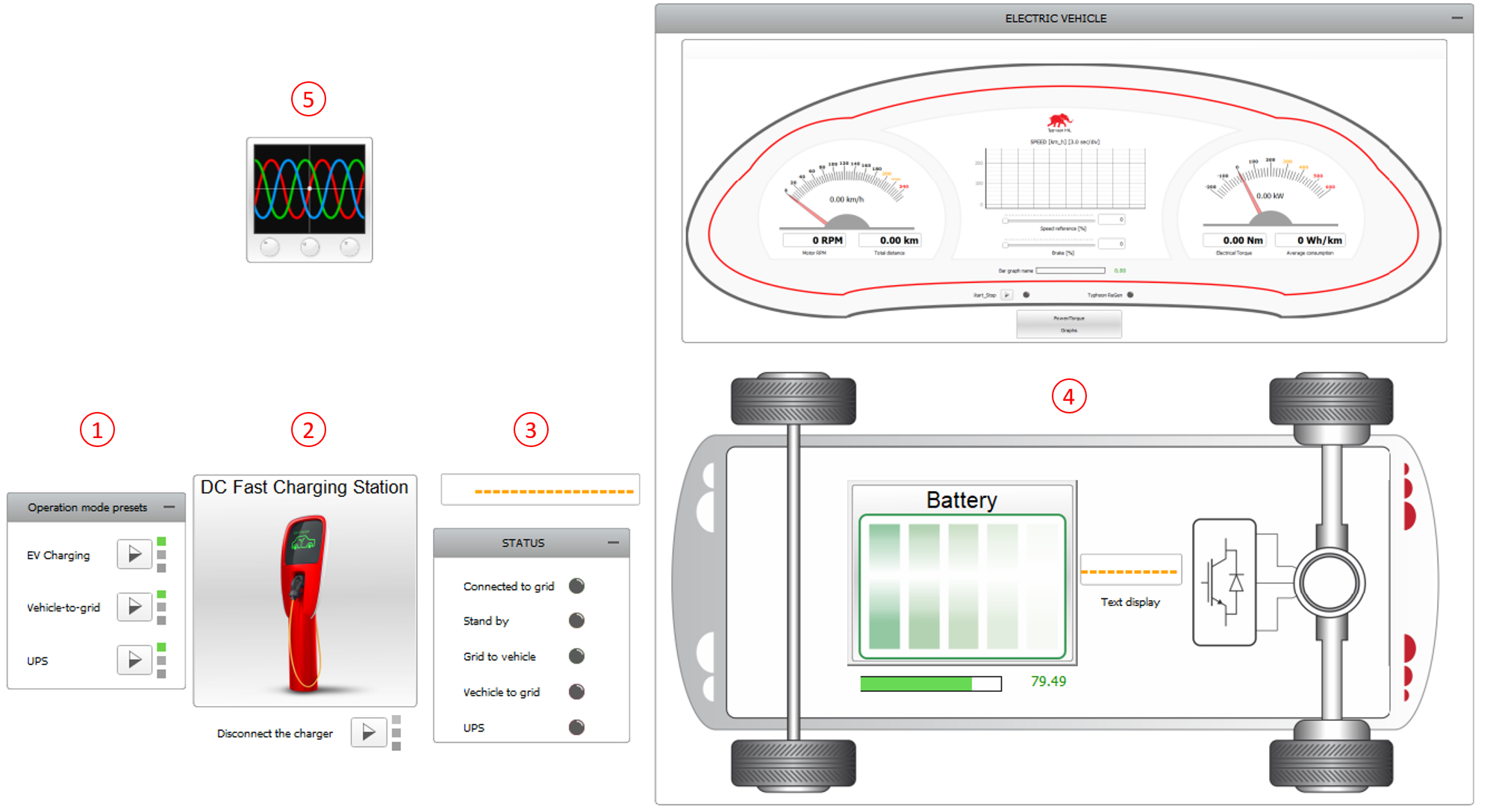
SCADA パネルは、図 7に示すように、次の部分で構成されています。
インバータモードプリセットグループには、EVが充電ステーションに接続されている限り、表4にまとめられたパラメータを自動的に設定するマクロボタンが含まれています。EV充電ボタンをアクティブにすると、グリッド電力P_refに負の値が割り当てられ、EVが充電されます。インバータモードをVehicle-to-gridに設定すると、充電ステーション内のS1コンタクタの状態が開き、P_refが正に設定されます。つまり、ローカルグリッド負荷はバッテリーとグリッドの両方から電力を受け取ります。最後に、UPSモードは充電ステーションをグリッドフォーミングモードに変更し、グリッド接続と電力需要をゼロに設定します。これは、EVがバックアップ電源(V2G)として機能できる住宅停電状況に相当します。
| P_ref | グリッド接続 | 動作モード | |
|---|---|---|---|
| EV充電 | -150kW | の上 | グリッドフォロー |
| 車両からグリッドへ | 150kW | の上 | グリッドフォロー |
| UPS | 0kW | オフ | グリッド形成 |
DC急速充電ステーションのサブパネルは、 EVバッテリーインバータが電力網に接続されている間、そのすべての機能(ステータス、モード、電圧、周波数、PQリファレンス)を制御します。EVは、モーターの回転速度がゼロで、ダッシュボードのスタート/ストップボタンで停止している場合にのみ、充電ステーションに接続できます。接続後は、「充電器切断」ボタンでDC充電器が切断されるまで、モーターを始動できません。
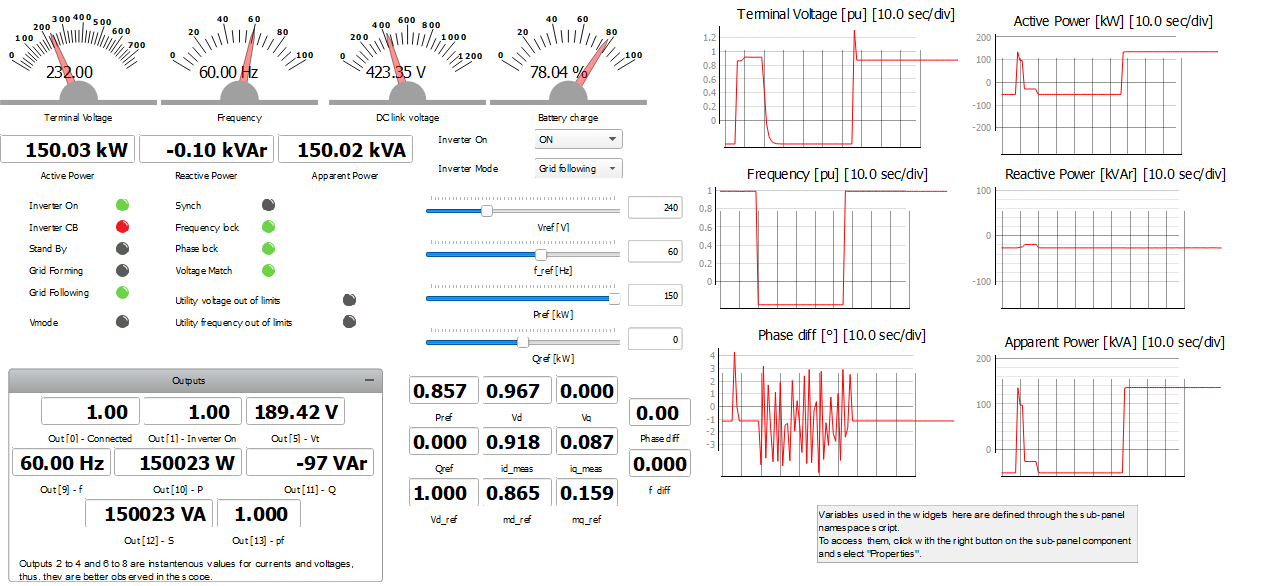
DC 急速充電ステーションのサブパネルには、図 8に示すように、グリッドの電圧と周波数、電力交換、同期状態を監視するためのグラフも含まれています。
ステータス LEDグループには、EV がグリッドに接続されているかどうか、および電力フローの方向に基づいたインバータの動作モード (電力交換がない場合はスタンバイ モード) を示す 5 つの LED が含まれています。
カーダッシュボードでは、スライダーを使ってモーターの始動と停止、スロットルの調整、ブレーキの作動が可能です。EVのダイナミクスは以下の方法で監視できます。
- 速度と有効電力の2つのゲージ
- 速度履歴のトレースグラフ
- SOCの棒グラフ
- モーター回転速度、総距離、電気トルク、平均エネルギー消費量を表示する 4 つのデジタル ディスプレイ。
- モーターステータスと回生ブレーキ(Typhoon ReGen)ステータス用の2つのLED
- パワー/トルクグラフサブパネル
キャプチャ/スコープ ウィジェットを使用すると、回路量の波形を観察できます。
これらのツールを組み合わせることで、EVの運転サイクルを再現できます。そのためには、まず電気自動車のサンプル回路図(.tse)ファイルを開き、コンパイルし、既存のSCADAパネル(.cus)を使用してHIL SCADAにロードして実行する必要があります。次に、 Car Dashboardサブパネルのスロットルスライダーを100%に設定し、モーターの始動/停止ボタンを押します。ルートに戻り、 Capture/Scopeウィジェットに入り、キャプチャをトリガーすると、モーター加速時の機械のアーマチュア電流と電圧が表示されます(図10 )。
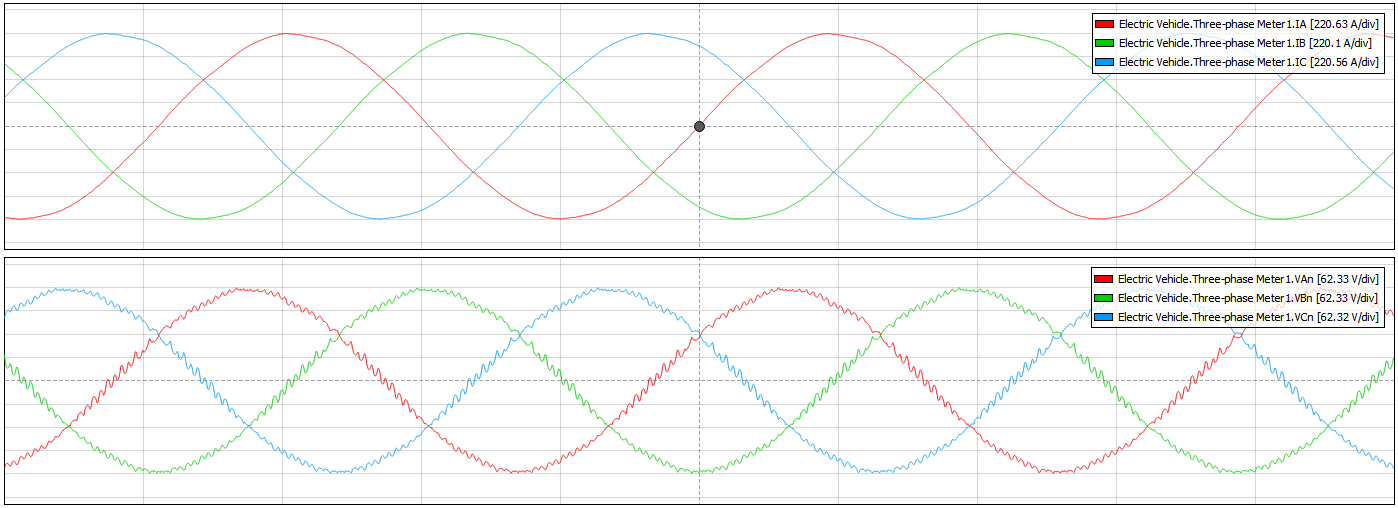
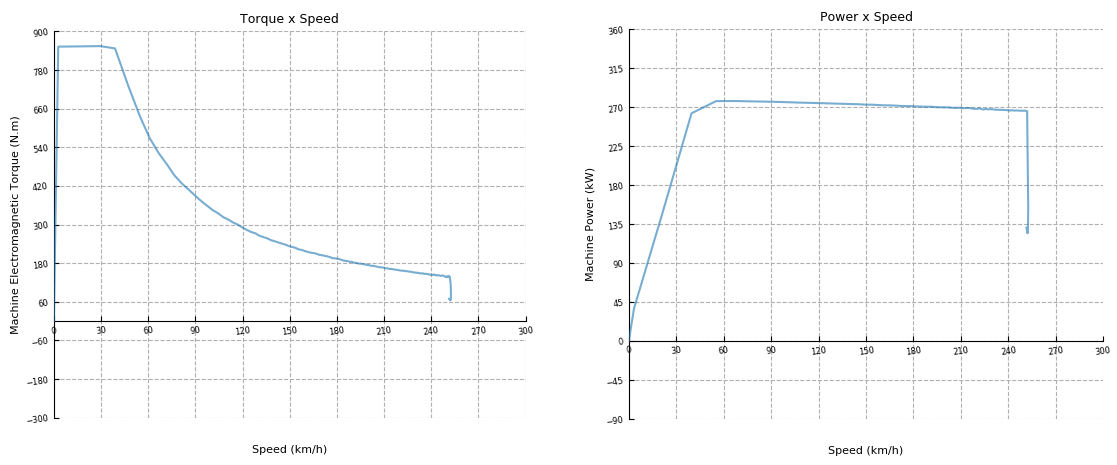
Car Dashboard サブパネルの Power/Torque Graphs ボタンをクリックすると、Torque x Speed および Power x Speed グラフが表示されます。加速時の応答は図 11に再現されています。Throttle スライダーを 100% に設定すると、最大トルク (860 Nm) が約 40 km/h まで適用されます。これは、最大トルクおよび最大出力 (270 kW) に対して計算された速度です。この速度を超えると、一定出力領域を維持するために、トルク参照が徐々に減少します。250 km/h でのブレークダウン ポイントの後は、最大出力を維持できなくなります (一定スリップ領域)。図 11の曲線をプロットするために使用される XY Graph ウィジェットの更新レートは、少なくとも 250 ms であることに注意してください。したがって、ここで示されている曲線とは少し異なる場合があります。図14に示すように、テスト自動化スクリプトを使用すると、解像度の高いグラフを取得できます。
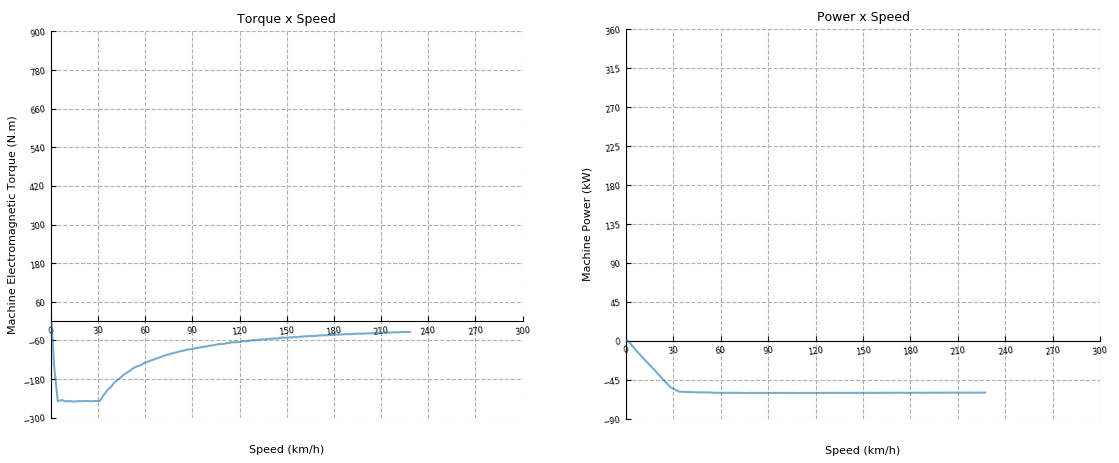
車両が最高速度250 km/hに達した後、スロットルスライダーをゼロに設定します(図12 )。これにより負のトルク指令が適用され、車両は減速すると同時に、最大回生電力60 kWでバッテリーを充電します。速度が低下すると、電力は一定に保たれたままトルクが増加します。30 km/hで250 Nmのトルク制限に達し、車両が停止する直前に回生電力が低下します。
テスト自動化
提供されているテストスクリプトは、異なるスロットル値(30%、50%、80%、100%)で加速時の電気自動車の応答を評価します。スロットル入力ごとに、速度、トルク、および電力信号がキャプチャされ、以下のアサーションがテストされます。
- EVが時速100kmに到達。
- 0~100 km/h の加速時間は 8 秒の制限を遵守します。
- 最終速度は230 km/hの制限に従います。
- トルクは基本速度まで一定です。
- 基本速度から最終速度に達するまで、パワーは一定です。
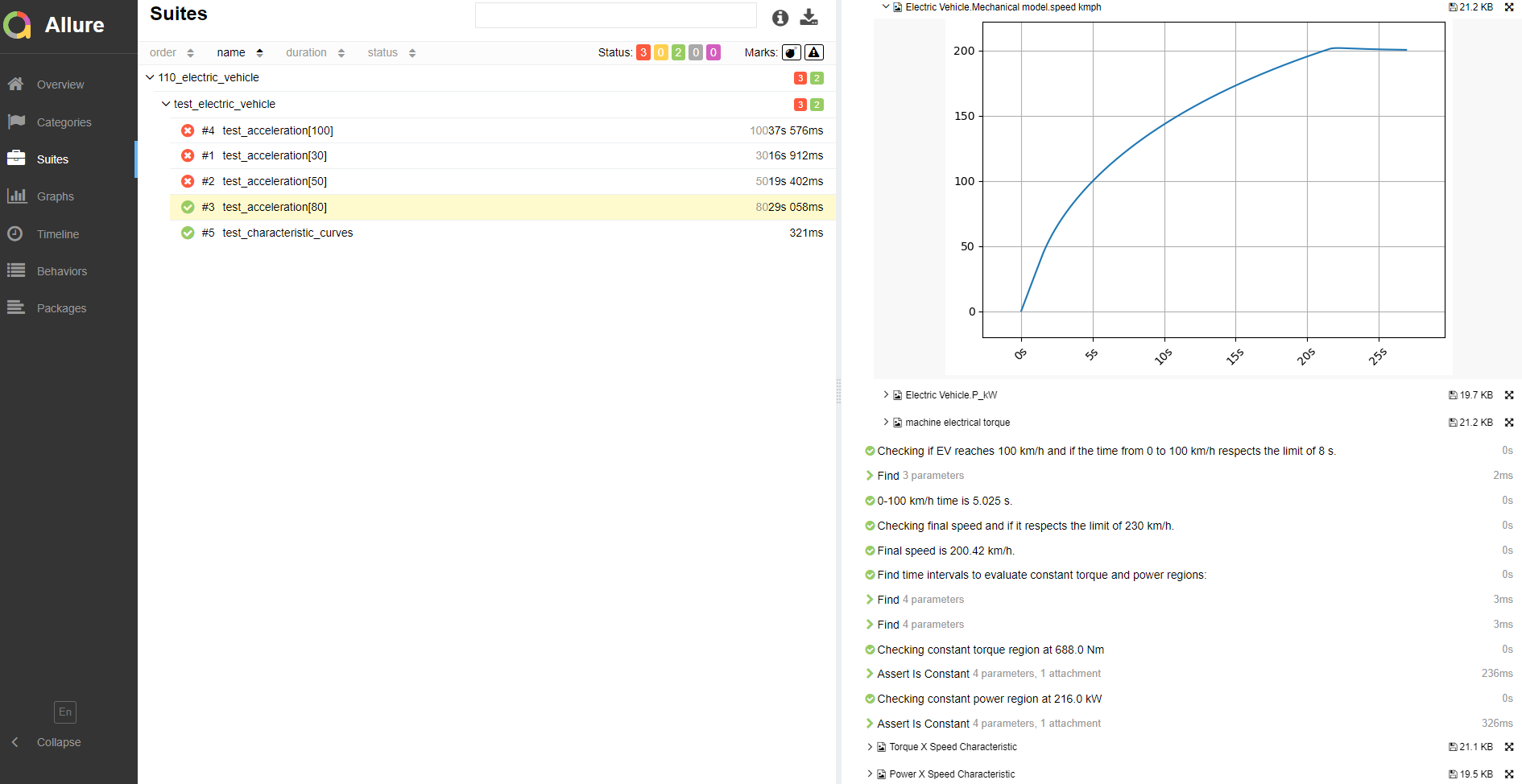
図13は生成されたテストレポートの一部を示しており、80%スロットルでの加速時の速度応答が強調表示されています。これはすべてのテストに合格した唯一のテスト条件です。30%スロットルでは、EVは時速100 kmに達しません。50%スロットルでは、車両は時速100 kmに達しますが、0から100 km/hまでの時間は8秒を超えます。100%スロットルでは、EVは必要な時間内に時速100 kmに達しますが、最終速度は230 km/hを超えます。すべてのテストは、定トルクおよび定出力のアサーションに準拠しています。
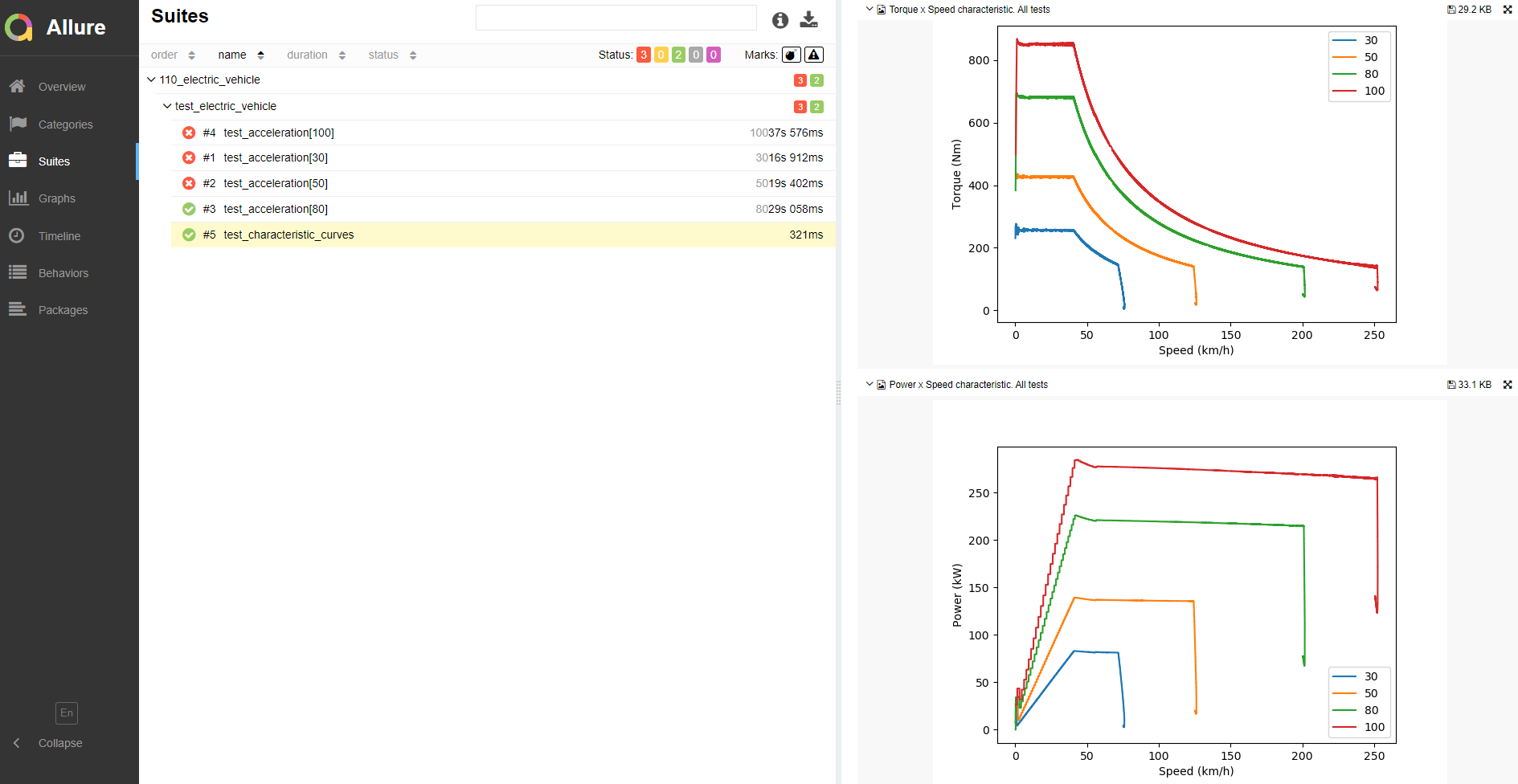
テストされたすべてのスロットル値に対するトルク x 速度とパワー x 速度の応答を比較したグラフもレポートに示され、図 14に再現されています。
TyphoonTest IDE からテストを実行すると、完全なテスト レポートを取得できます (簡単にアクセスするには、サンプル エクスプローラーの [テストを開く] ボタンを押します)。
要件の例
表5は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル |
例\モデル\自動車\電気自動車 電気自動車.tse 電気自動車.cus 例\テスト\110_電気自動車\ test_electric_vehicle.py |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL506 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 3 |
| 最大マトリックスメモリ使用率 | 0.49% (コア2) 57.1% (コア1) 72.17% (コア0) |
| 最大時間枠利用率 | 12.5%(コア2) 31.79% (コア1) 41.79% (コア0) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
著者
- ドゥシャン・コスティッチ
- マルコス・モッチェリーニ
- セルヒオ・コスタ
- カイオ・RD・オソリオ