ハイブリッド列車
中央管理システムの下で複数の負荷とソースを単一のシステムに統合するハイブリッド トレイン モデルのデモンストレーション。
導入
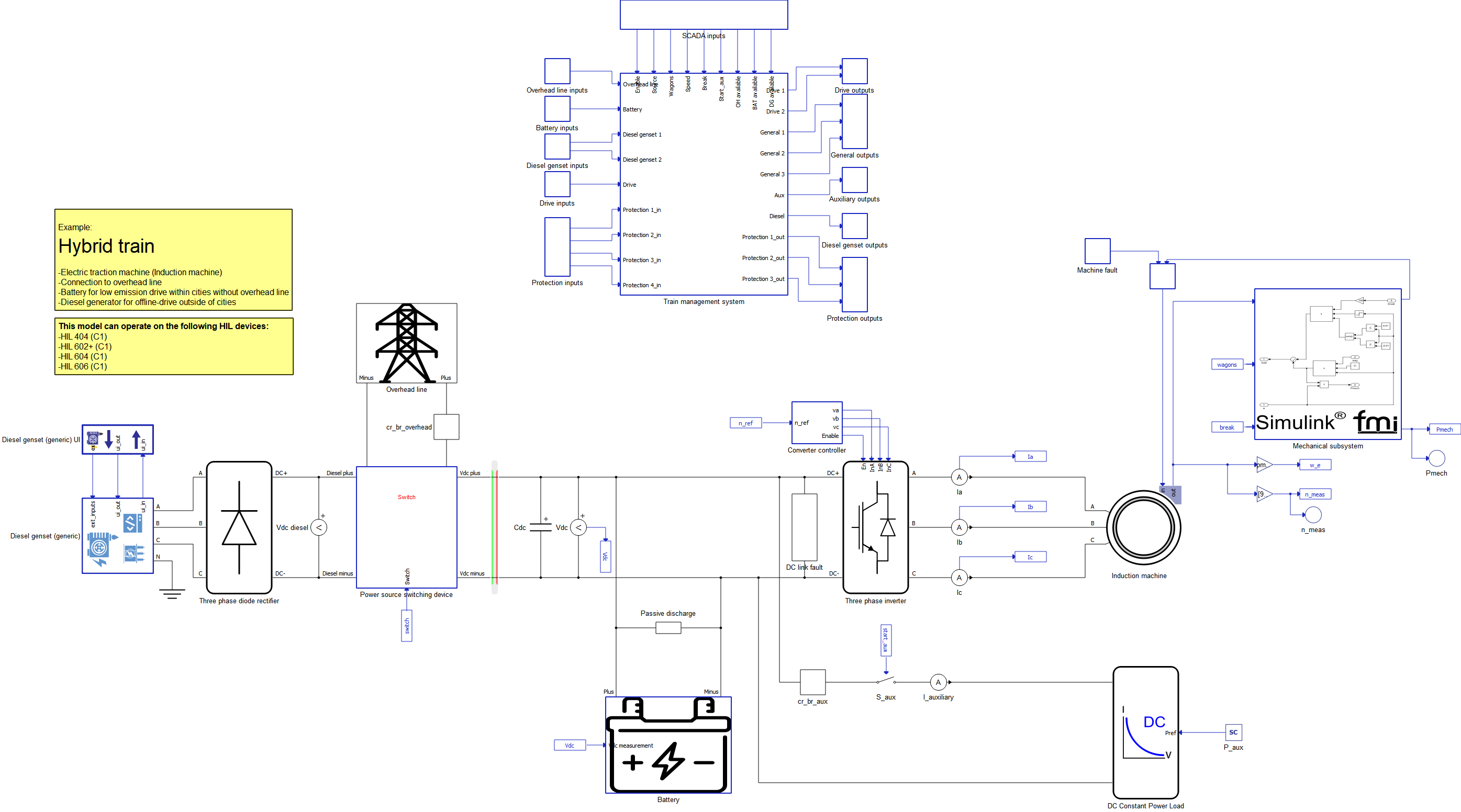
このモデルは、3つの異なる電源(DC架空送電線、電池、ディーゼル発電機)で駆動可能なハイブリッド列車を扱っています。3つの電源はすべて電源スイッチングデバイスに接続され、電源は電動駆動装置と補助負荷にリンクされます。電動駆動装置は、電流制御電圧源インバータ(CRVSI)とそれに接続された1000kW三相かご形誘導機(以降は誘導モーター)で構成されています。間接ベクトル制御が実装されています。モデルの機械部分はSimulink®モデルとして実装され、 FMI Importを使用してTyphoon HIL Schematic Editorにインポートされます。補助負荷は、 DC定電力負荷としてモデル化されています。モデルにはサブシステム保護も組み込まれているため、電気的故障のテストに適しています。さらに、他のすべてのサブシステムを監視および制御する列車管理システムが実装されています。
このアプリケーションサンプルモデルは、DC架空送電線、蓄電池、その他のサブシステムについて、メーカーの設計を一切考慮していません。その代わりに、事前に設計されたパワーエレクトロニクスとマイクログリッドコンポーネントを活用して、高忠実度のシステムレベルアプリケーションを構築する方法を示しています。お客様固有の要件に合わせて柔軟にカスタマイズできます。シミュレーションにはHIL SCADA、テスト記述にはTyphoonTest IDEを使用しています。このサンプルモデルを使用するには、Microgrid Toolboxへのアクセスが必要です。
モデルの説明
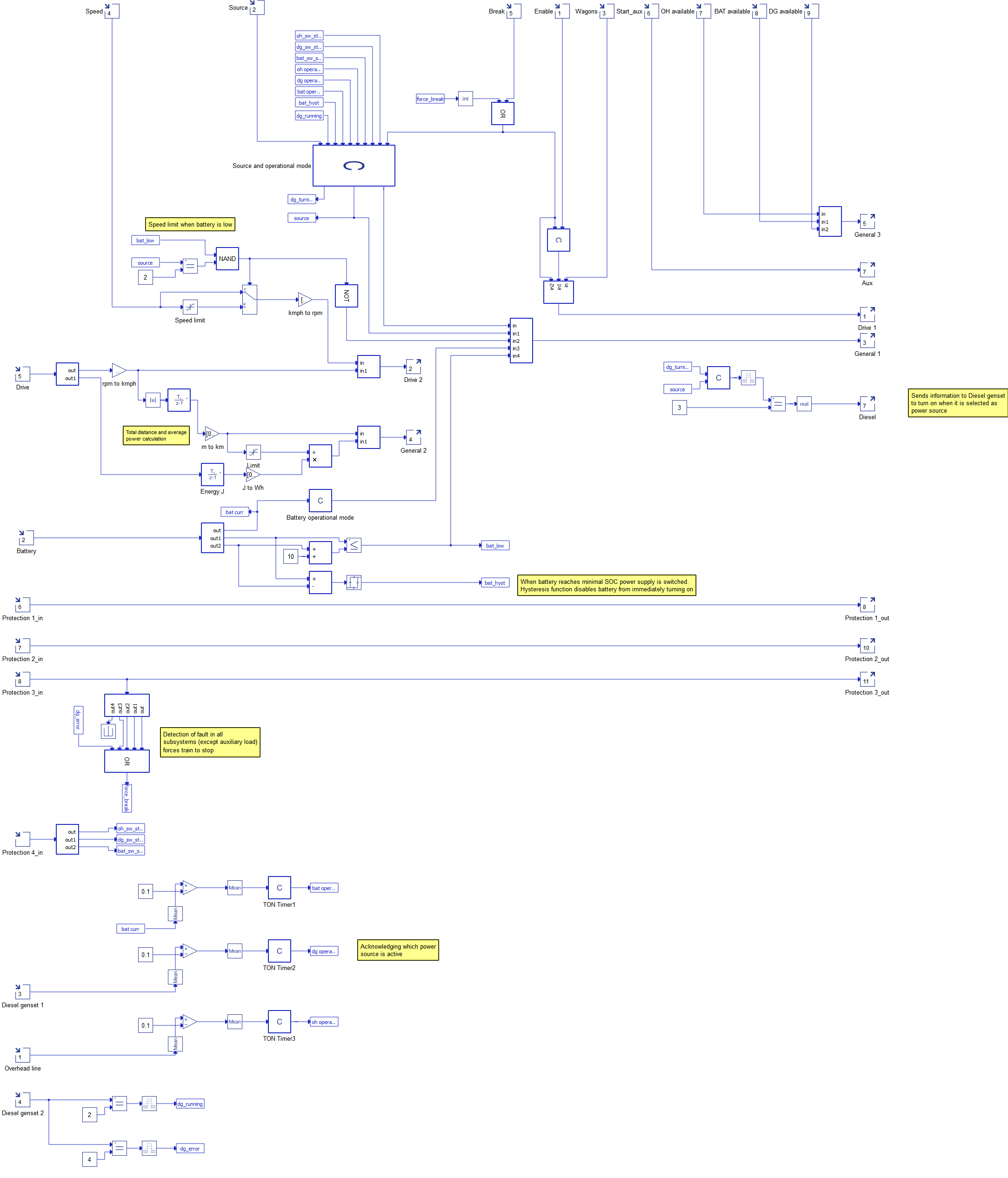
前述の通り、電動駆動装置は、架空直流電力線、バッテリー、ディーゼル発電機(汎用)の3種類の電源から電力を供給できます。いずれの場合も、バッテリーはCRVSIに接続されます。架空直流電力線またはディーゼル発電機を使用する場合、バッテリーは電源の電気負荷として機能します(この場合、バッテリーは充電されます) 。架空直流電力線とディーゼル発電機の両方が切断されている場合、バッテリーは電源として機能し、電動駆動装置への電力供給に使用されます。モデルを図1に示します。
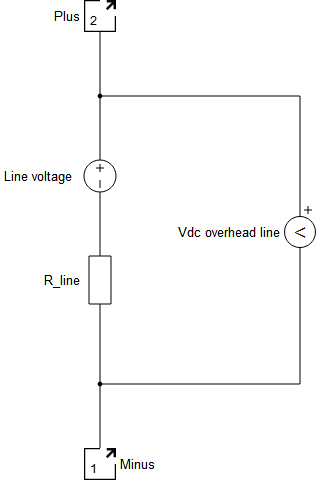
DC 架空電力線は、独自の電圧と直列抵抗を持つ単純な電圧源としてモデル化され、図 2に示されています。
ディーゼル発電機のモデリングでは、ディーゼル発電機 (汎用)コンポーネントと、そのコンポーネントとのインターフェイス用のディーゼル発電機汎用 UI が使用されます。
ディーゼル発電機コンポーネントの出力には三相ダイオード整流器が接続されているため、内部にインピーダンスが追加されます。この追加インピーダンスにより、AC/DC変換の品質が向上します。三相ダイオード整流器は、Three Phase Diode Rectifierを用いてモデル化されています。
電気バッテリーは、直列に接続されたバッテリーコンポーネントと信号制御ソースコンポーネントとしてモデル化されます。信号制御電流源は、バッテリーの電流を制御し、バッテリーの充放電速度を調整します。これは、バッテリーが接続されているDC-DCコンバータの簡易バージョンとして機能します。バッテリーは定電流で充放電されます。実装されたバッテリー制御方法は、バッテリーの充電状態 (SoC) の監視を可能にし、最大および最小バッテリー電力に制限を課します。このモデルでは、バッテリーの充電状態は常に20%〜80%の間に維持されます。この間隔は、実際の電気バッテリーの典型的な最適使用範囲を表すためです。制御部を図3に示します。
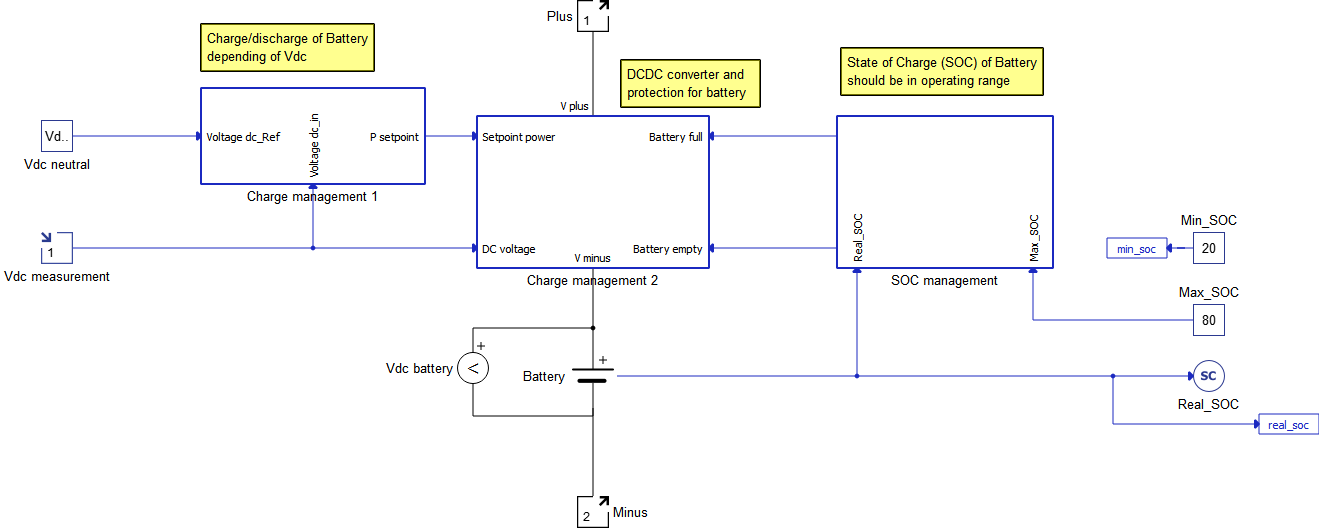
充電管理1サブシステムはバッテリーの電力を制御します。測定されたバッテリー電圧が中性点DC電圧(990Vに設定)よりも高い場合、バッテリーは充電されます。バッテリー電圧が中性点DC電圧よりも低い場合、バッテリーは放電されます。測定されたDC電圧と中性点DC電圧の差は、バッテリーの電力基準を計算するために使用されます。
充電管理 2 サブシステムには、信号制御電流源、過放電保護、過充電保護、および過電流保護が含まれています。
SOC 管理サブシステムは、深放電および過充電保護に信号を送信することで、バッテリーの充電状態を 20% ~ 80% に維持できるようにします。
バッテリーの出力(DCリンクとも呼ばれます)には、10kΩの抵抗と470mFのコンデンサが接続されています。抵抗はバッテリーの受動放電をモデル化するために使用され、コンデンサはCRVSIで使用される電圧の品質を向上させるために使用されます。
DC定電力負荷としてモデル化された補助負荷もDCリンクに接続されます。DC定電力負荷の電力はSCADA入力によって設定されます。
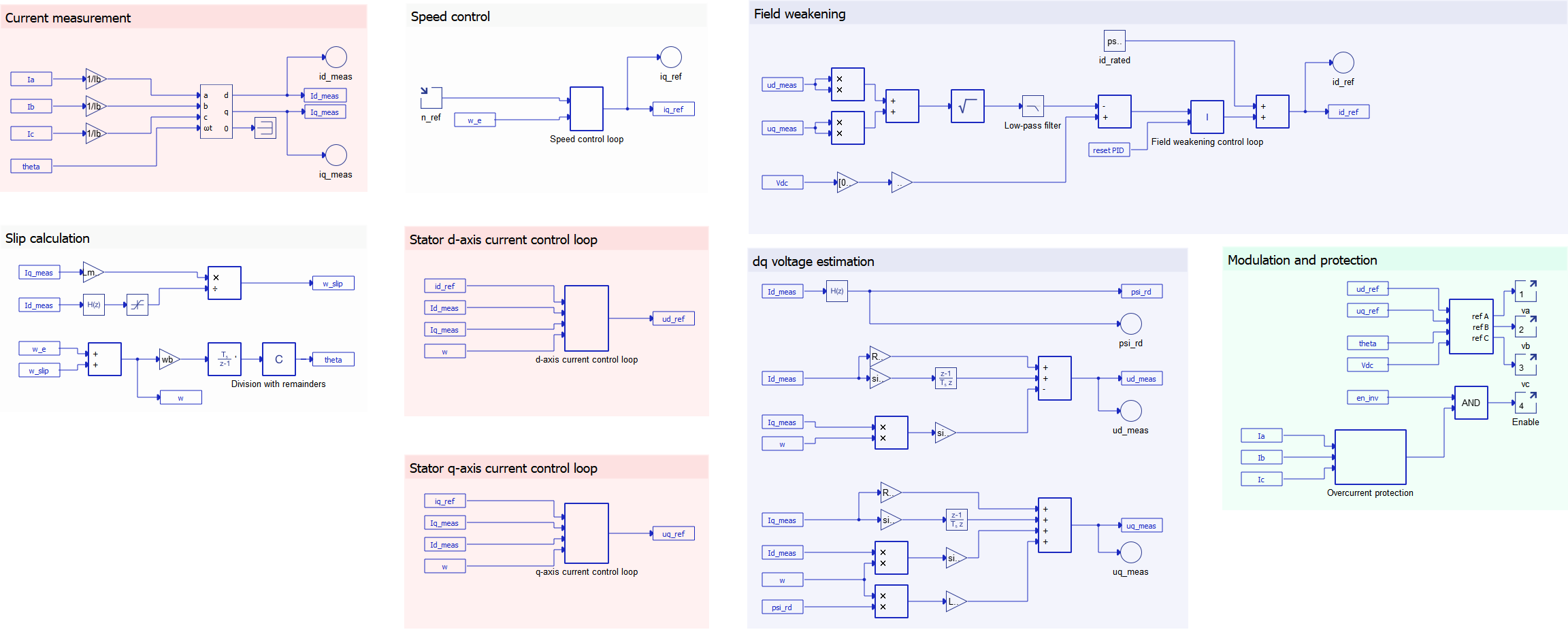
図 4に示すように、CRVSI の制御を実装するために複数のサブシステムが使用されます。測定された相電流と角度 θ は、サブシステムのスリップ計算部分で計算されるABC から DQ コンポーネントへの入力として提供されます。制御はユニットごとに実装されていることを強調する必要があります。速度、固定子 d 軸電流、固定子 q 軸電流、および固定子 d 軸基準電流の 4 つの制御ループがあります。PI コントローラーは最初の 3 つの制御ループに実装されていますが、4 番目の制御ループには I コントローラーが実装されています。アンチワインドアップと出力制限は、4 つのコントローラーすべてで使用されます。カスケード制御が実装されており、固定子 q 軸電流ループは速度ループの内部ループになっています。測定された d 軸および q 軸固定子電圧を見つけるアルゴリズムが実装されているのは、これらのパラメーターが弱め界磁アルゴリズムの入力として使用されるためです。
前述の通り、モデルの機械部分はSimulink®モデルによって実現されています。信号処理コンポーネントを用いることで、同じ機械モデルを回路図エディターモデルとして実現できることは強調しておく価値があります。ただし、この実装は、 FMI Importを用いてSimulink®から回路図エディターにモデルをインポートできることを示すためのものです。
この場合、Simulink®モデルの定数コンポーネントの値はTn/(3*wn)であることに留意することが重要です。ここで、 Tnは定格トルク、 wnは定格機械角速度を表します。これは、インポートされたSimulink®モデルで使用されるコンポーネントのプロパティを、スケマティックエディターでのモデルの検証およびコンパイル中に実行されるスケマティックエディターPythonモデル初期化スクリプトで割り当てることができることを示しています。
機械負荷のトルク-速度特性は直線近似されます。特性の傾きは貨車の数(1~4台)によって決まります。この特性の式は以下のとおりです。
機械式ブレーキも実装されており、CRVSI を無効にして、角速度が約 0 rad/s に達するまで一定のトルクを適用します。
コンポーネントの電気的保護は、回路遮断器に基づいています。回路遮断器は、システム内で対象となるコンポーネントに応じて異なる方法で実装されます。直流電力架空線および補助負荷の場合、回路遮断器は図5に示す回路遮断器サブシステムの一部として実現されます。
ただし、ディーゼル発電機、電動駆動装置、および電気バッテリーの場合、回路遮断器はこれらのコンポーネントのオン/オフを切り替える既存のメカニズムに統合されています。これらの場合、保護機能は保護サブシステムによって提供されます。実装にこのようなばらつきがあるにもかかわらず、回路遮断器の全体的な性能と機能はシステム全体で一貫しています。
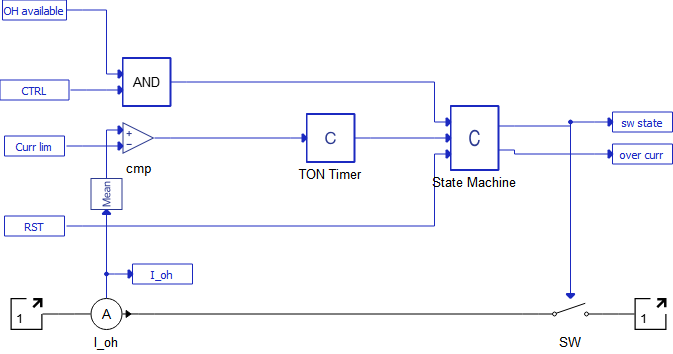
スイッチの状態は、測定電流が割り当てられた電流制限を超えないという条件によって決定されます。さらに、スイッチはSCADA入力(シミュレーションセクションで詳細に説明)によって再起動および制御できます。TONタイマー(オン遅延タイマー)を使用すると、測定電流が電流制限を一定時間超えた場合に保護システムが作動します。これにより、コンデンサが放電されて実際の電圧源に接続された場合など、短時間の電流インパルスによる保護システムの作動が防止されます。TONタイマーは、平均値コンポーネントに接続されたC関数コンポーネントによって実現されます。
ディーゼル発電機汎用 UI では、ディーゼル発電機汎用用のより高度な保護スキームがすでに実装されていますが、保護の選択性を可能にするために、バッテリーやその他のサブシステムに使用されるものと同様の回路ブレーカーが実装されています。
DCリンク故障サブシステムとマシン故障サブシステムは、故障のシミュレーションに使用されます。IGBT故障はCRVSIに実装されています。
列車管理システム (TMS) は、モデルのシミュレーションに密接に結びついたモデルのサブシステムです。 TMS の入力と出力を図 6に示します。 TMS は、シミュレーション中にユーザー コマンドをモデルの他の部分に転送するために使用されます。 たとえば、シミュレーション中に提供される基準速度は、電動駆動装置のコンバータ コントローラーに転送されます。 TMS は、ユーザー指定の値を転送するだけでなく、誘導モーターの平均消費量を計算したり、バッテリーがほぼ消耗したときに速度制限を有効にしたりするなどの機能も果たします。 さらに、TMS は、測定された列車速度やバッテリーの動作モードなど、モデルからのフィードバックを提供します。 TMS のその他の機能については、図 6と図 7を参照してください。
シミュレーション
このアプリケーションには、図7に示すような、あらかじめ構築されたSCADAパネルが付属しています。このパネルには、実行時にシミュレーションを監視および操作するための、最も重要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
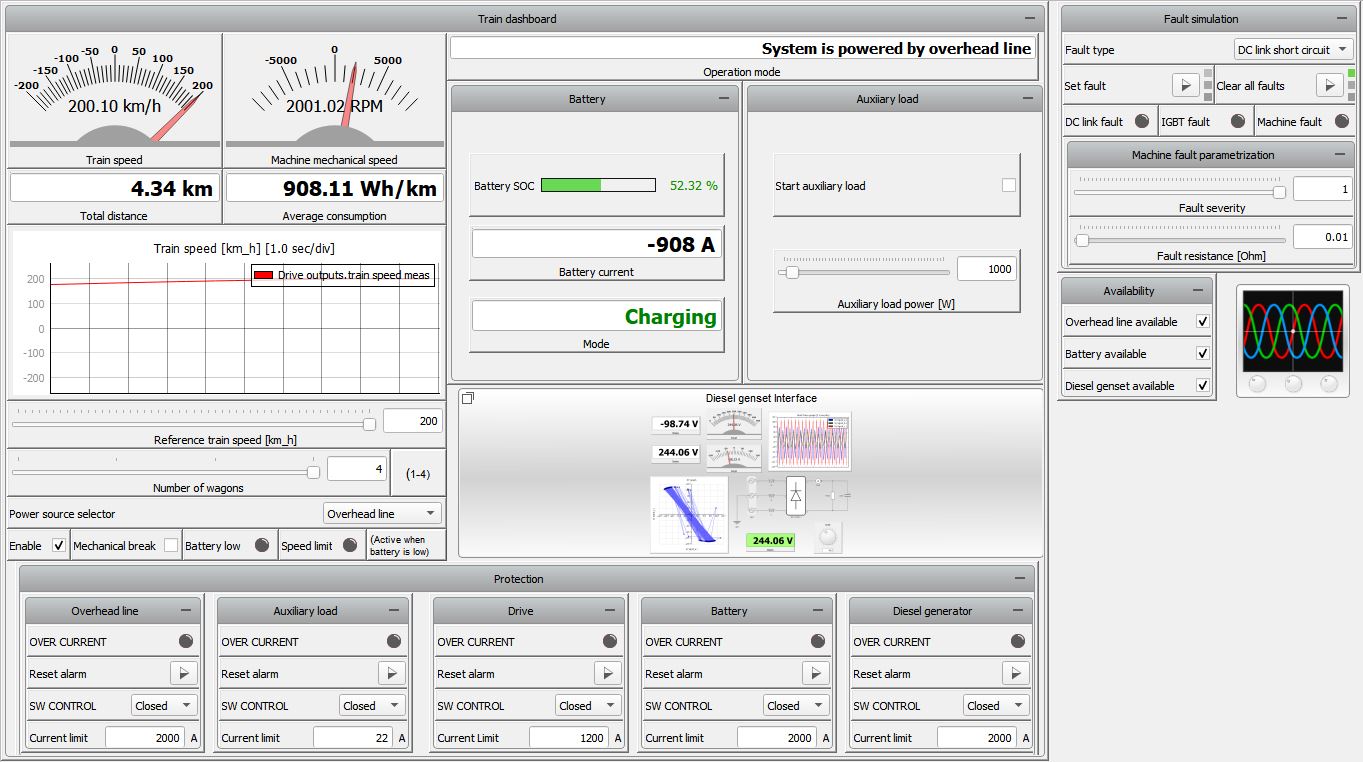
SCADA パネルは、トレイン ダッシュボードと障害シミュレーションの 2 つの主要部分で構成されています。
列車ダッシュボードは、ハイブリッド列車の運転手が使用する実際の列車ダッシュボードをエミュレートします。これには、km/h で測定された列車速度、RPM での機械速度、km での総距離、および Wh/km での平均消費量が含まれます。速度の変化を時間とともに表示するウィジェットが追加され、速度ダイナミクスをよりよく観察できます。スライド ウィジェットを使用して、基準列車速度、貨車数、および補助コンバーター電力を設定します。コンボ ボックスを使用して、電源を選択します。[開始] チェックボックスは、電動ドライブを開始するために使用します。[補助を開始] は補助負荷を開始するために使用します。[機械ブレーキ] は CRVSI をオフにして機械ブレーキを適用するために使用します。速度制限の 100 km/h に達したときに表示するための 2 つの LED インジケーターが追加されています。1 つは、バッテリーの充電状態が 30% 未満であるにもかかわらずバッテリーが電源として機能している場合に表示され、もう 1 つは、バッテリーの充電状態が 30% 未満になったときにドライバーに通知するためのものです。
棒グラフウィジェットは、バッテリーの充電状態(SOC)、電流、および動作モード(充電/放電/アイドル)を表示します。動作モードは電源に関するテキスト情報を提供しますが、コンボボックスで選択した電源とは異なる場合があります。例えば、バッテリーが放電中でSOCが20%に達すると、TMSは自動的に電源をDC架空送電線またはディーゼル発電機に切り替えます。
列車ダッシュボードの保護サブグループを使用すると、モデルに実装されている保護機能と直接インターフェースできます (図 7 )。すべてのサブグループの実装は同じです。保護システムが起動されると、LED が信号として使用されます。保護システムが起動した場合、アラームを手動でリセットする必要があります。スイッチの状態は、スイッチを閉じるか開くかを選択することで手動で変更できます。保護システムが起動すると、閉じたスイッチが開くことがあります。電流制限は、保護システムをトリガーするために必要な電流制限を設定します。保護システムが起動すると(ディーゼル発電機の固有の保護を含むが、補助負荷の保護システムは除く)、 CRVSI がオフになり、機械ブレーキが適用されます。
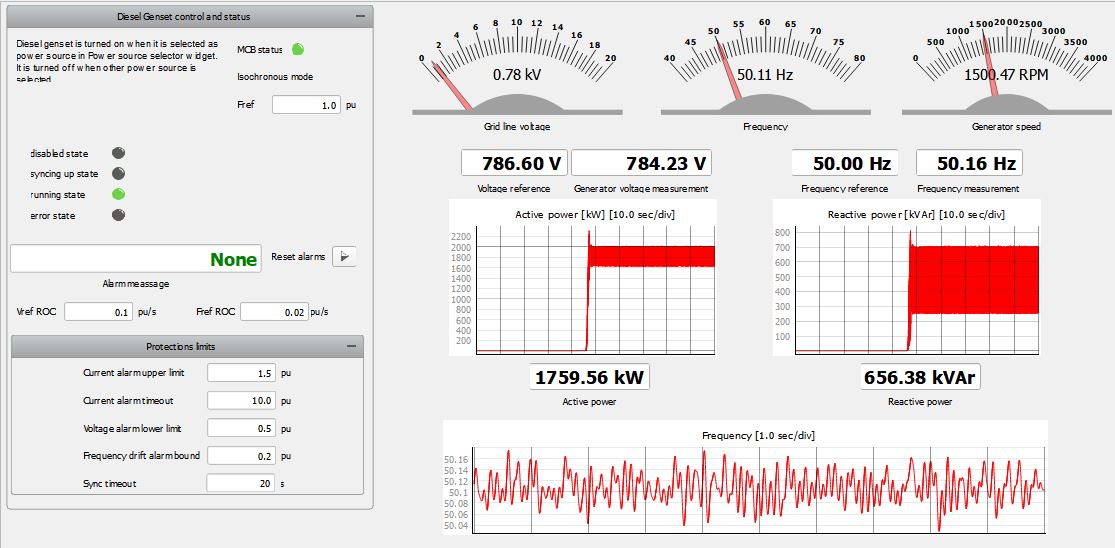
ディーゼル発電機インターフェース サブグループでは、図 8に示すように、ディーゼル発電機汎用コンポーネントの操作および保護インターフェースをより詳細に確認できます。
故障シミュレーショングループには、実際の列車ダッシュボードでは表示されないウィジェットが含まれています。前述の通り、DCリンク短絡、IGBT故障、機械故障の3種類の故障を設定できます。故障タイプコンボボックスで選択した個々の故障の設定とクリアには、マクロボタンを使用します。各故障の発生状況は、3つのLEDで通知されます。機械故障はターン間短絡故障であり、故障の重大度と故障抵抗をパラメータ化することでパラメータ化できます。
テスト自動化
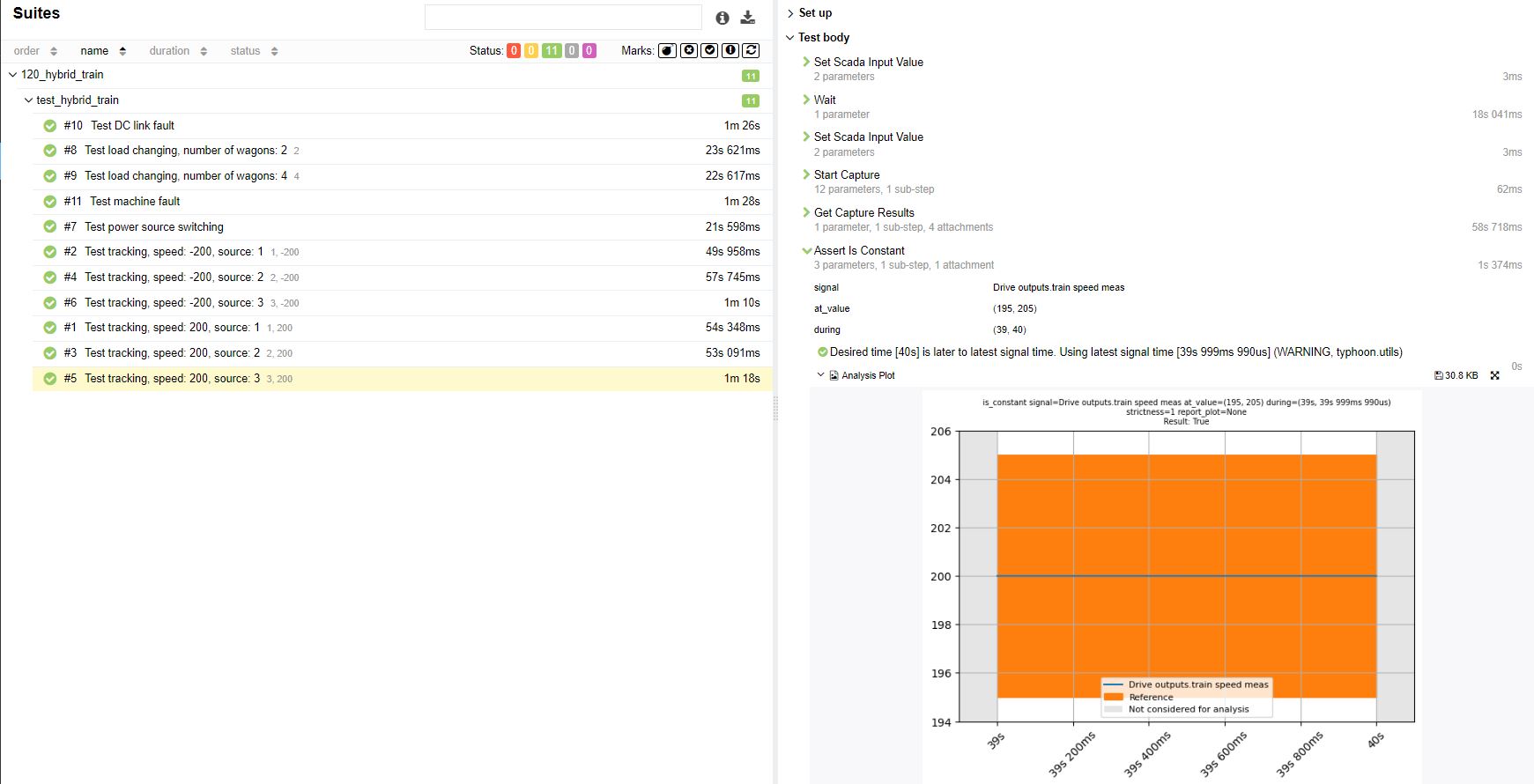
提供されたテストスクリプトは、異なる電源においてハイブリッド列車が双方向で最高速度に到達する能力を評価します。さらに、列車の運行中に電源を変更してもハイブリッド列車の性能に影響がないことも検証します。最後に、機械およびDCリンクの故障に対する保護機能が検証されます。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル |
例\鉄道\ハイブリッド列車 ハイブリッド列車.tse ハイブリッド列車.cus |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 2 |
| 最大マトリックスメモリ使用率 | 66.41% (コア1) 99.95% (コア0) |
| 最大時間枠利用率 | 29.55% (コア1) 35.0% (コア0) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
著者
[1] マルコ・アラギッチ