船上PMS
船舶電力管理システム(PMS)の機能と通常動作のデモンストレーション
導入
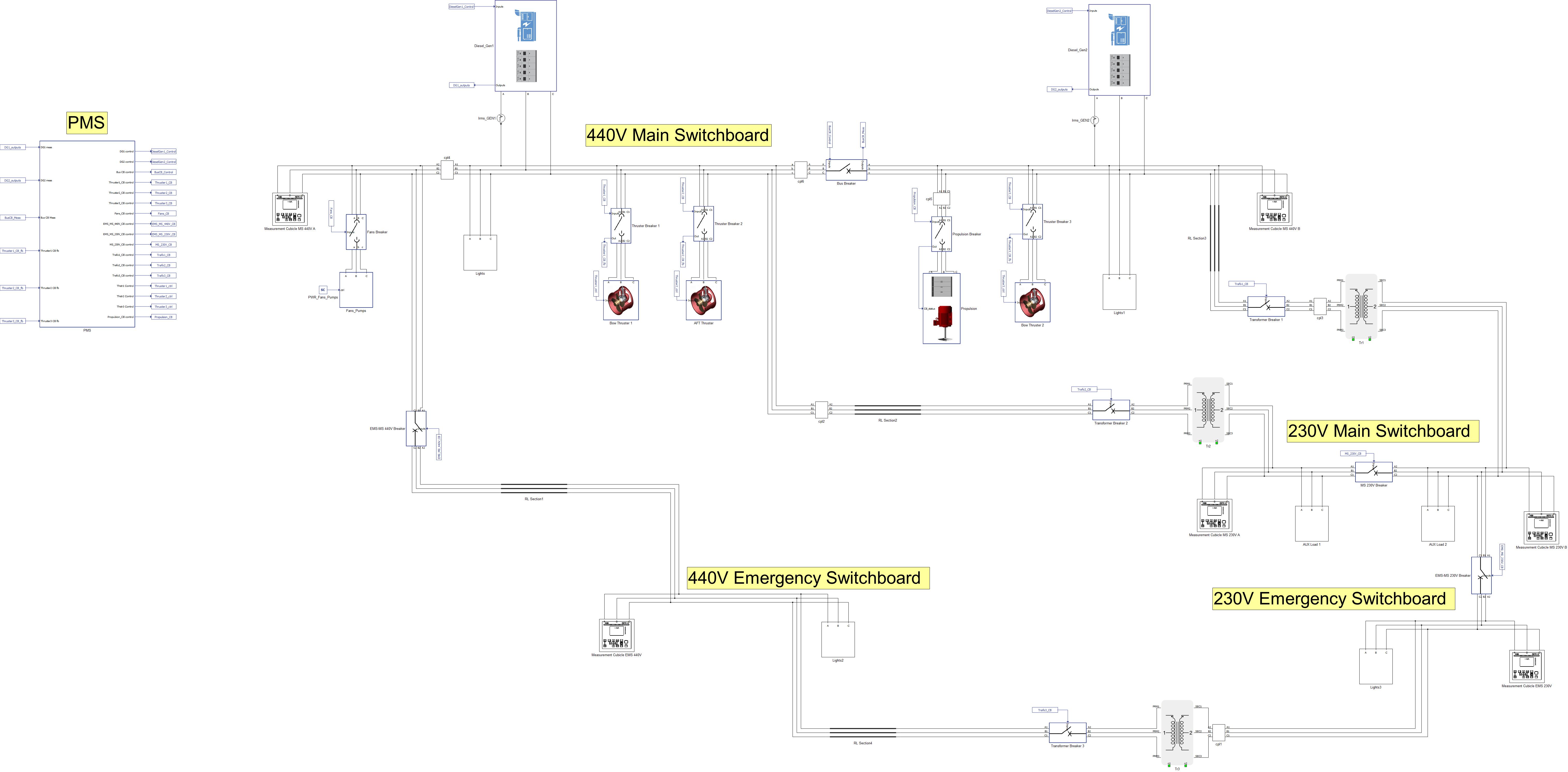
この海洋マイクログリッドモデルは、船上電力管理システム(PMS)とそのいくつかの機能の例を示しています。船の主電源は2台のディーゼル発電機(DG)から供給され、モデル内のいくつかの主要な負荷グループ(定常負荷(照明や補助(AUX)負荷など)、可変負荷(ファンやポンプなど)、モーター負荷(推進およびスラスター))に電力を供給します。マイクログリッドは、バスブレーカーで相互接続された複数のバスから構成され、一部のパーツはRLセクションとして実装されています。海洋マイクログリッドは、電圧レベルの異なる2つのセクション(230 Vと440 V)に分けることができ、3つの変圧器を介して接続されています(図1 )。
モデルの説明
このマイクログリッドへの電力供給はDG1とDG2から行われ、各発電機の公称出力は2.69MWで、合計最大5.38MWとなります。両DGはPMSまたはSCADAパネルからの手動操作でコマンドを受信します。
SCADAからDGへのコマンド(発電機のオン/オフ、有効電力または無効電力の参照値の提供など)は、ルートパネルまたはDGのサブパネルから実行できます。DGサブパネルから操作することで、より多様なコマンドを実行できるだけでなく、DGの挙動を詳細に把握できます。
電力フローを手動で管理するには、 DG2制御ウィジェットの「ローカル制御を強制」チェックボックスをオンにします。これにより、PMSがDG2に与えられたコマンドを上書きするのを防ぎます。
荷重は変数形式または定数形式で実装されます。ライトと補助荷重は定数荷重とみなされ、モデルの様々な場所に配置されます。
変動負荷
ファンとポンプは、時間変動コンポーネントを用いた可変RL負荷として実装されています。ファンとポンプのグループウィジェットでブレーカーを開閉することで、これらの負荷を有効または無効にすることができます。また、ファンとポンプが消費する総電力は、総負荷に対するパーセンテージで測定され、同じウィジェットで設定できます。
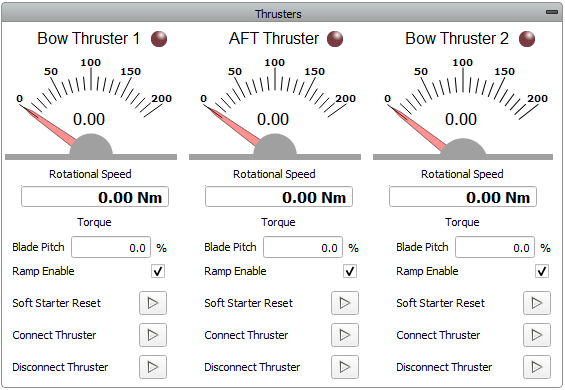
スラスタは、 C関数にメカニカルソルバーとバスバー間に配置されたソフトスタータを備えたVBR(Voltage Behind Reactance)誘導機としてモデル化されます。スラスタの制御はSCADAパネルから行われます。ソフトスタータのリセットが開始されない場合、スラスタの次回起動時に、ソフトスタータを介して全電圧が直ちに供給されます。これは、ソフトスタータが起動時に巻数比が変化する理想的な変圧器としてモデル化されているためです。リセットが開始されない場合、その巻数比は1:1のままです。ブレードピッチを変更することで、モーターに公称トルクの一定の割合で負荷をかけることができます。一方、ランプ有効化は、マシンに与えられるトルクの変化率を制限します。
推進ユニットは、受動整流器と可変抵抗器(信号処理によって制御)で構成されています。これは、コンバータベースのコンポーネントを含む唯一のユニットです。これらは、2レベルモータ駆動と誘導モータの抽象化を形成します。
シミュレーション
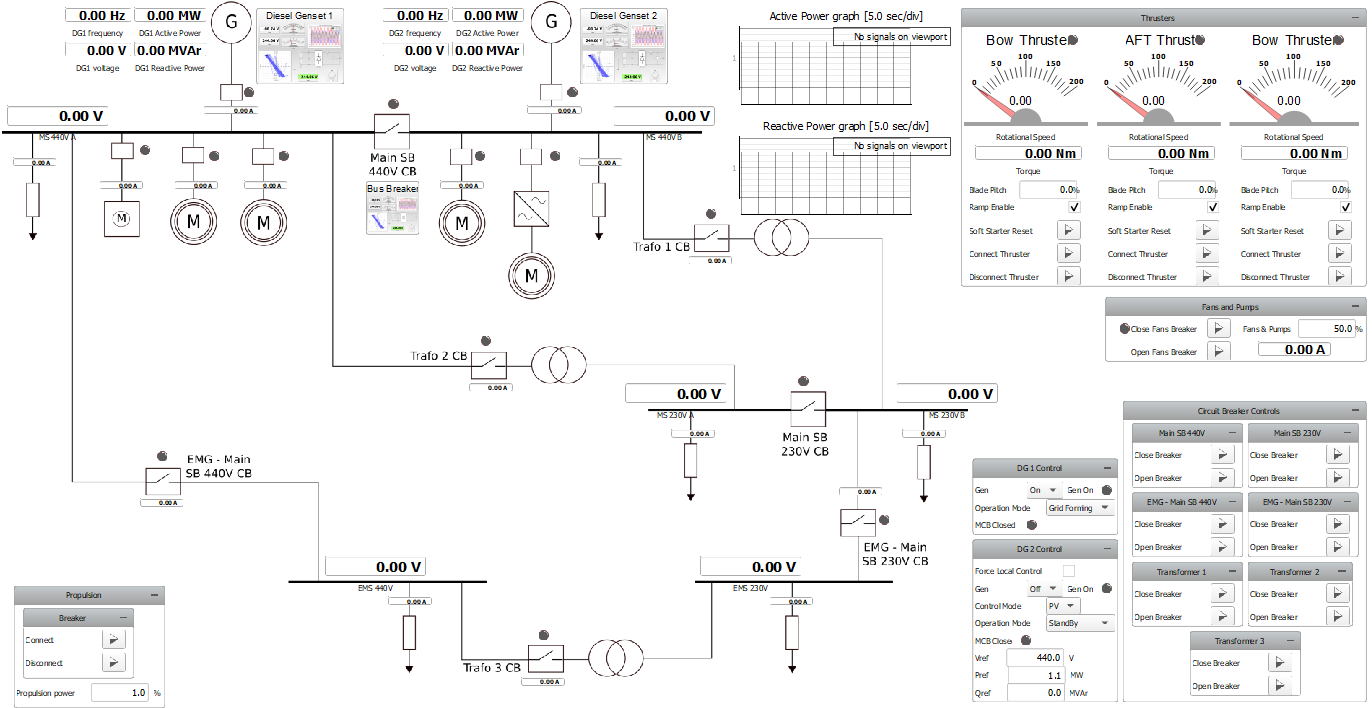
このアプリケーションには、図3に示すようなSCADAパネルがあらかじめ構築されています。実行時にシミュレーションを監視および操作するための最も重要なユーザーインターフェース要素(ウィジェット)が提供されており、自由にカスタマイズできます。
PMSの目的は、発電機と遮断器を制御し、電力分配とDGの過負荷防止を可能にすることです。PMSは、DGの有効電力と無効電力、DG遮断器の状態、および主SB440V CB遮断器の状態と測定・計算された同期パラメータを測定します。システムは受信したデータに基づいて、DG1、DG2、および主SB440V CBにどのようなコマンドを送信するかを決定します。
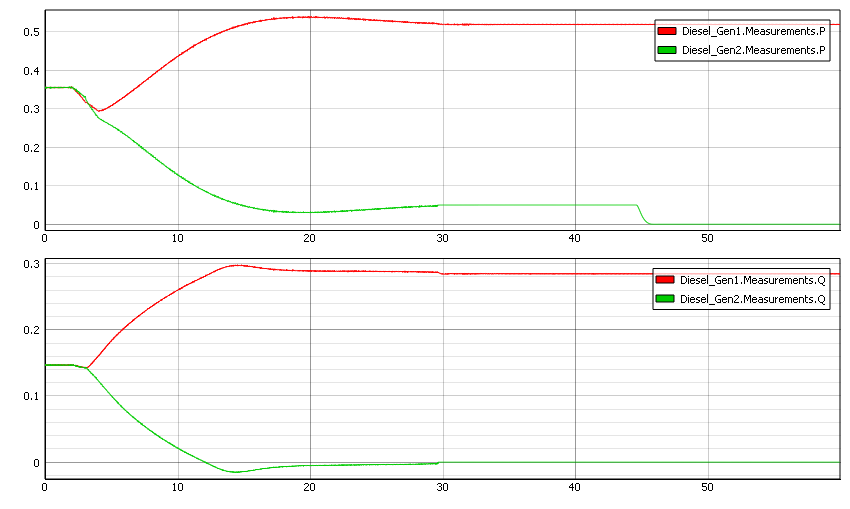
PMSはDG1の出力電力を監視し、十分な時間にわたって1.61MWを超えると、システムはDG2を起動します。DG2がオンになりバスバーに接続されるとすぐに、PMSはDG1とDG2の出力電力を均等化するプロセスを開始し、均衡状態に達します。両方のDGの合計出力電力が十分な時間にわたって1.75MWを下回ると、PMSは2つ目のDGをオフにするよう指示します。DG2のオフ時とオン時の電力需要の差は、DG2の動作によるスナバ損失によって発生する追加の電力需要によるものです。
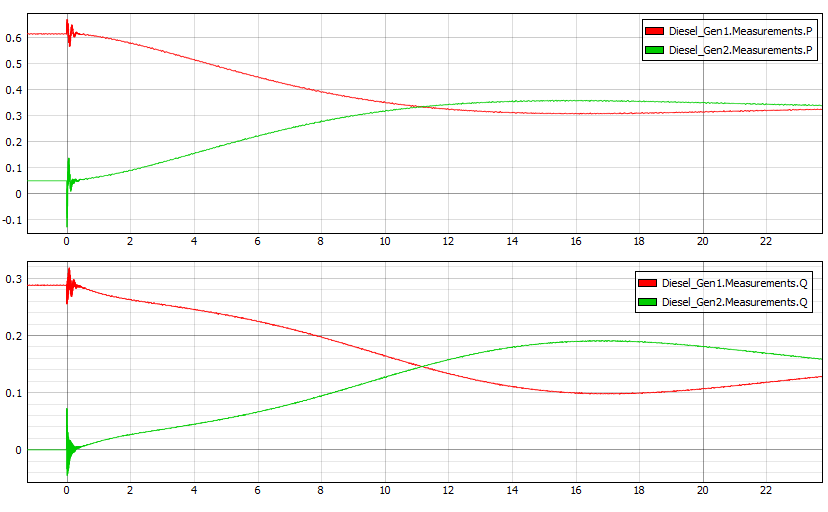
PMSの動作を観察するには、DG1を手動でオンにしてグリッド形成モードに設定する必要があります。スラスタと推進力のみが、システムの総消費電力を十分に増加させ、PMSにDG2の起動をトリガーする負荷となります。スラスタを接続すると、システムの消費電力に大きなスパイクが発生します(図4 )。このスパイクの振幅は、起動時にソフトスタータがアクティブであったかどうかによって異なります。これらのスパイクは、PMSがDG2に電力不足への対応を要求するために必要な最小時間よりも速く循環するため、PMSが第2発電機をオンにすることはありません。
負荷を接続し、需要の合計が電力閾値を超えるのに十分な値に設定すると、PMSはDG2をオンにしてバスバーに接続し、電力分配プロセスを開始します。これには、両方のDGの出力を均等化するプロセスが含まれます。これは、有効電力ウィジェットと無効電力ウィジェットで確認できます。PMSは、両方の発電機に同じ有効電力と無効電力の基準値を与えます(図4 )。
システムの消費電力を削減すると、PMSはDG2をオフにし、DG1のみを稼働させます。DG2をオフにする前に、PMSはDG2の電力負荷を軽減し、DG1の出力を上げます。
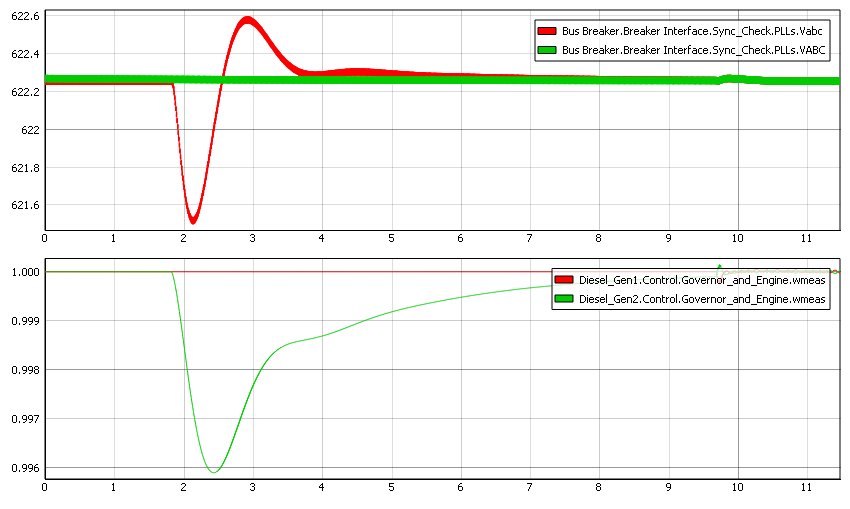
PMSは、主SB 440V CBの同期と投入も担います。このプロセスを監視するには、遮断器が開いている状態で、両方のDGをオンにし、それぞれの側のバスバーに接続する必要があります。その後、PMSは同期プロセスを開始します。接触器の両側の位相差と電圧差が所定の範囲内に収まると、遮断器は投入信号を受け取ります。
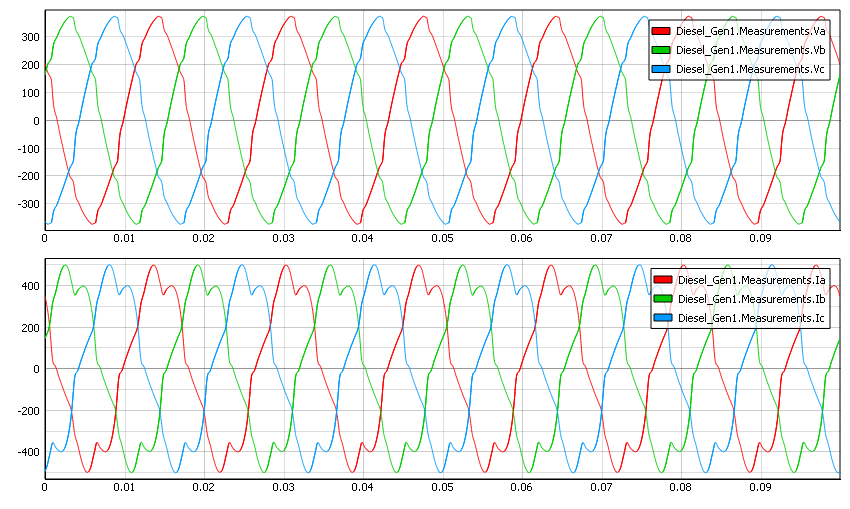
三相整流器をバスバーに接続すると、系統に高調波が発生し、その影響は推進負荷に応じて変化します。推進装置の消費電力は、SCADAで公称負荷に対する割合を入力することで制御されます。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\船舶用電力システム\船上電力 船上電源.tse 船上電源 |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL604 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 5 |
| 最大マトリックスメモリ使用率 | 78.98% (コア0) 22.49% (コア1) 43.9%(コア2) 11.57% (コア3) 32.89% (コア4) |
| 最大時間枠利用率 | 51.25% (コア0) 36.72% (コア1) 36.88% (コア2) 18.12% (コア3) 10.16% (コア4) |
| シミュレーションステップ、電気 | 4マイクロ秒 |
| 実行率、信号処理 | マルチレート(100 µs、300 µs、6 ms) |
著者
[1] ディミトリエ・イェリッチ