溶接インバータ
定電流電気アーク溶接インバータの通常動作と低電圧ライドスルー (LVRT) 動作のデモンストレーション。
導入
溶接は、建設、製造、メンテナンス業界において不可欠かつエネルギー集約的なプロセスです。電気アーク溶接では、2つの電極間にアークを発生させることで溶融エネルギーが供給されます。一方の電極は溶接対象となる金属ワークピースです。電気アーク溶接には複数の技術があり、それぞれに固有の電力品質要件があります。例えば、金属不活性ガス溶接(MIG)やサブマージアーク溶接(SAW)などの溶接技術では、定電圧電源が必要です。図1の左側に示されている定電圧は、「ストレート」または「フラット」特性とも呼ばれます。
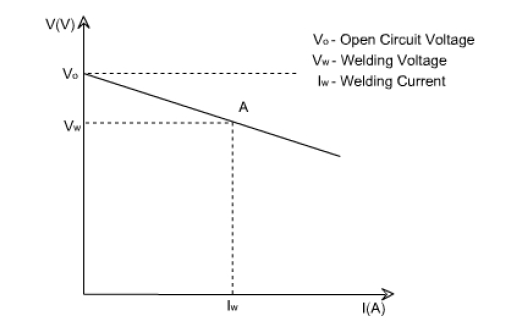
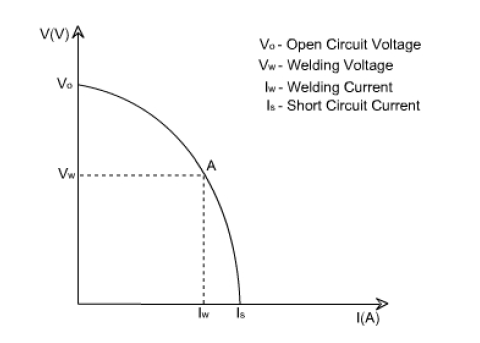
一方、シールドメタルアーク溶接(SMAW)とガスタングステンアーク溶接(GTAW)には定電流電源が必要です。定電流電源のプロファイルは図1の右側に示されており、ドループ電圧/電流曲線とも呼ばれます。どちらの場合も、電圧の変化は溶接電流にわずかな変化をもたらします。溶接工は電圧を調整することでアークの長さを制御し、アークへの入熱量を制御して必要な溶接を実現します。
ドループ電圧/電流曲線(図1 、右)は、開路電圧と短絡電流の両方の場合を示しています。開路電圧、つまり無負荷電圧が高いほど、溶接アークは容易に発生し、アークの消弧は困難になります。アーク放電時に電極がワークピースに付着するのを防ぐため、短絡電流は公称負荷よりも高い値にすることが望ましいです[2]。
このモデルは、アーク溶接インバータアプリケーションで使用される定電流電源トポロジと閉ループ制御を実装しています。また、変動グリッド電圧条件下での性能もテストされています。
モデルの説明
モデルの電気部分を図2に示します。グリッドは、各相の電圧源、抵抗、インダクタンスを用いてモデル化されています。インダクタンスと抵抗のグリッドパラメータは、「モデル初期化」パネルで設定します。

三相ダイオード整流器はAC電圧をDC電圧に変換するために使用され、DCリンクコンデンサによってさらに平滑化されます。単相インバータはDCリンクの反対側に接続され、DC電圧を高周波AC電圧に変換します。単相インバータのスイッチング周波数(fs)は、モデル初期化パネルで設定します。高周波AC電圧は高周波トランスに供給され、ここで目的のレベルまで降圧されます。その後、ダイオード全波整流器によって電圧が整流され、出力インダクタを介して負荷に電流が供給されます。負荷は抵抗成分R_loadを使用してモデル化されます。制御ループの出力電流は、電流計を使用して測定されます。
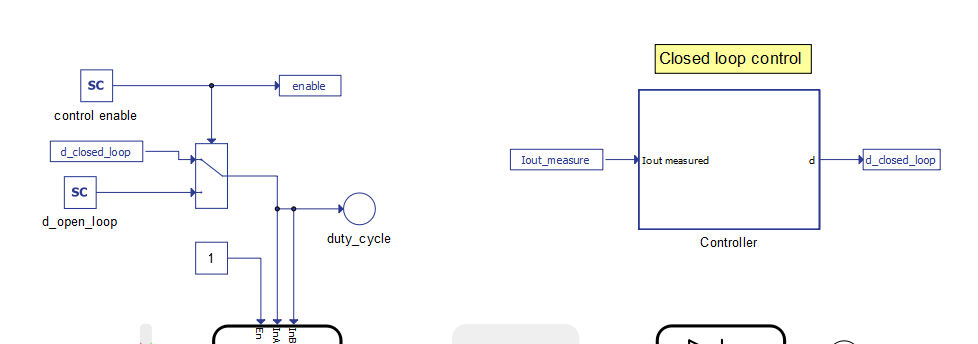
モデルの制御部は青色で表され、図3に示されています。単相インバータは、開ループモードと閉ループモードで制御できます。動作モードの選択は、SCADA入力コンポーネントを介して行われます。
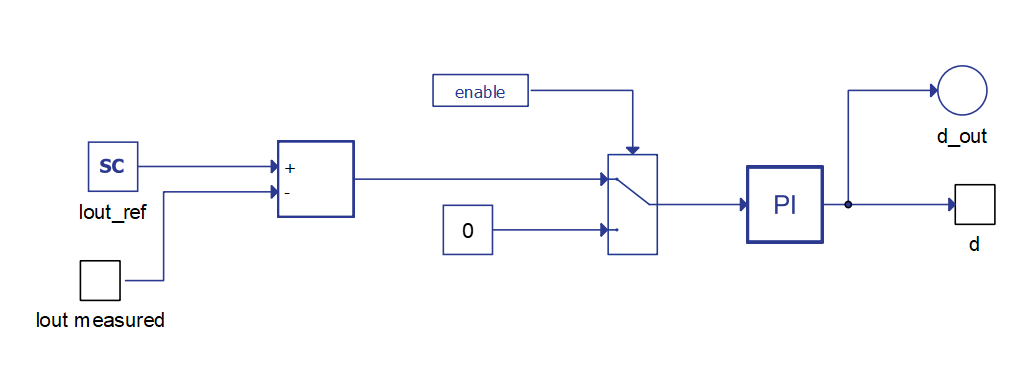
閉ループ制御は、図4に示すControllerサブシステムに実装されています。基準電流値はSCADA入力コンポーネントを使用して設定されます。PIレギュレータのパラメータkpとkiは、モデル初期化パネルで設定されます。コントローラは、基準電流値と測定された出力電流に基づいてデューティサイクル値を計算します。
このモデルでは、コアあたりの電力コンバータの数に関するハードウェア制限を克服するために、コアカップリング要素が使用されています。コアカップラー要素は電気回路を2つの部分に分割し、2つのコアをそれぞれ0.5µsのシミュレーション時間ステップで実行できるようにします。
回路分割に関する追加情報については、ここを参照してください。
シミュレーション
このアプリケーションには、あらかじめ構築されたSCADAパネル(図5 )が付属しています。このパネルには、シミュレーションの実行中に監視や操作を行うための、最も基本的なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
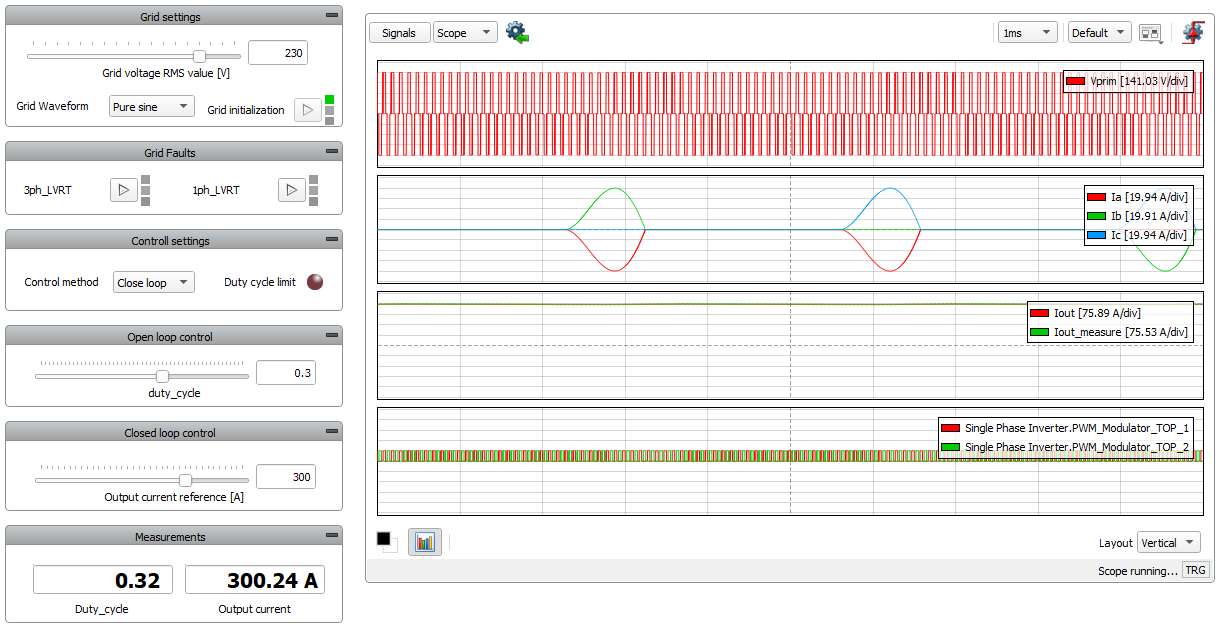
以下のケースでは、低電圧ライドスルー (LVRT) 障害時の通常の動作モードと動作について説明します。
- 通常動作モード:グリッド電圧はグリッド電圧スライダーを使用して230Vに設定されています。出力電流の基準値は、出力電流基準スライダーウィジェットを使用して300Aに設定されています。この動作点では、計算されたデューティサイクルは0.32です。デューティサイクルに応じて、PWM信号は上図のグラフに示すように生成されます。
図6インバータ出力電圧(Vprim)は、PWM信号に基づいて生成されます(下のグラフを参照)。 図6.
図6 PWM信号とインバータ出力電圧 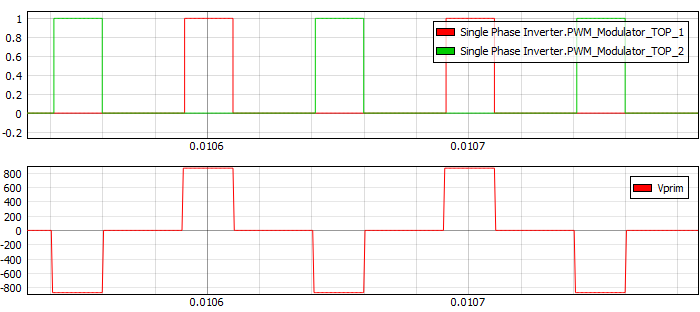
図7は出力電流波形を示しています。実効値が基準電流の300Aに近いことがわかります。
図7出力電流 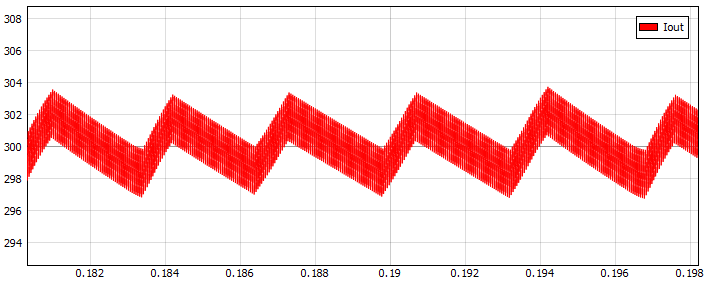
図8は、電圧が変化しても動作範囲内であれば、コントローラが電流の基準値を維持することを示しています。これは、ここでモデル化した溶接インバータが定電流電源として動作するように制御されているためです。コントローラは約1.9秒でデューティサイクルの限界値0.5を超えてしまい、設定された電圧レベルに対して基準電流値を供給できなくなります。この影響は図8の下のグラフに示されています。
図8定電流電源 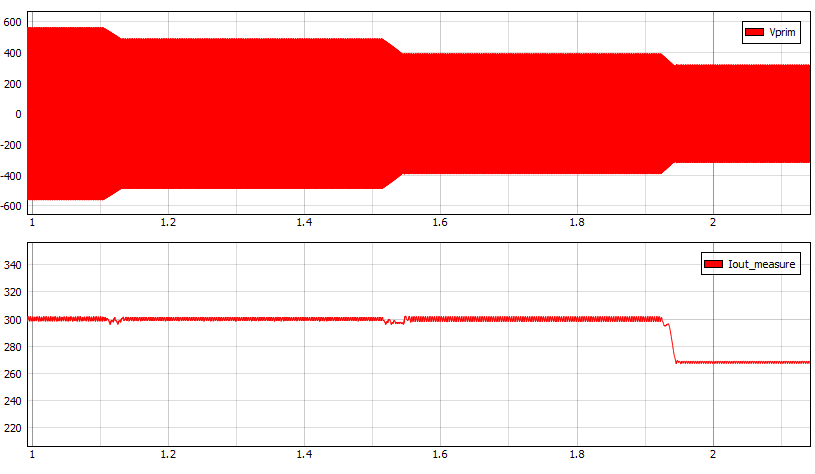
- 三相LVRT時のインバータの動作:LVRTはマクロボタンウィジェットを用いて実装されます。理想電圧源の振幅は230Vから115Vまで500msの間変化し、その後電圧は初期値に戻ります。三相LVRTは、図の下のグラフに示されている相電圧測定で確認できます。 図9.
図9三相LVRT時のインバータ動作 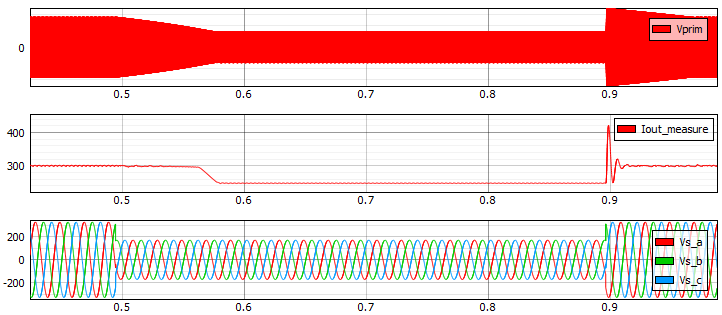
図9の中央のグラフは、出力電流の低下を示しています。これは、デューティサイクルの限界に達したことで発生し、システムは電流を所定のレベルに維持できなくなりました。0.9秒後、グリッド電圧の回復により、溶接電流全体がオーバーシュートしました。これは、グリッド側の電圧変動が溶接プロセスの品質に影響を与える可能性があることを示しています。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\電源\溶接インバータ 溶接インバーター.tse 溶接インバータ |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 2 |
| 最大マトリックスメモリ使用率 | 18.55% (コア1) 14.62% (コア0) |
| 最大時間枠利用率 | 65.45% (コア1) 47.27% (コア0) |
| シミュレーションステップ、電気 | 0.5マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
参考文献
著者
[1] クリスチャン・モナール