高調波アナライザー付きアクティブフィルタ - 平均モデル
アクティブ高調波フィルタを使用してマイクログリッドの高調波歪みを軽減するデモンストレーション。
導入
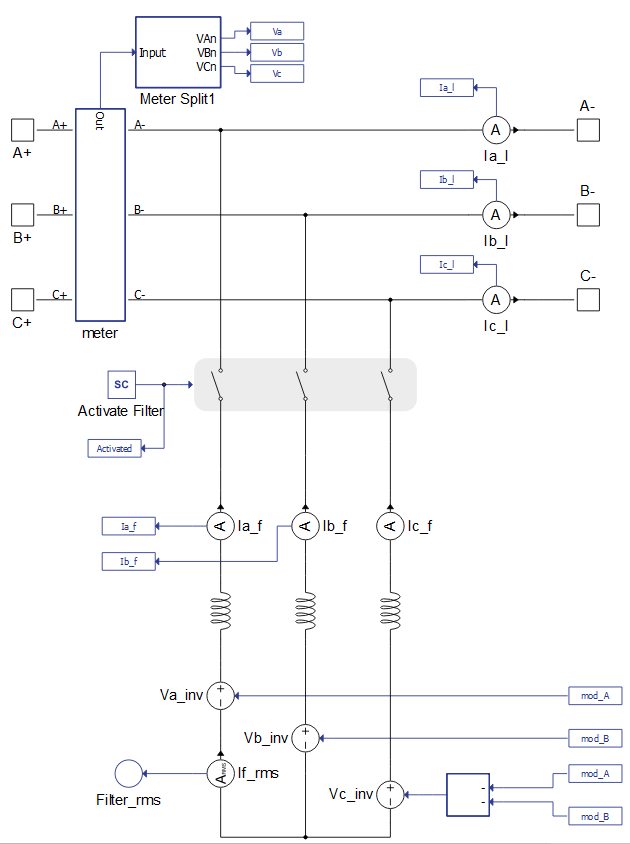
現代の電力網では非線形負荷の使用が増えるにつれ、高周波高調波電流が大きな問題となっています。アクティブ高調波フィルタ(AHF)の活用は、この高調波汚染に対処する非常に効果的な方法です。シャントトポロジーのAHFでは、電流源が非線形負荷をグリッドに接続し、負荷に高調波電流を注入します。これらの高調波電流は、高調波汚染の影響を打ち消し、理想的にはグリッド電流を純粋な正弦波曲線にするように設計されます。前述の電流源を生成するために非常に一般的に使用される方法の1つは、電流制御電圧源インバータ(VSI)を使用し、DC側にエネルギー貯蔵用のコンデンサを配置することです。平均的なモデルでは、これはVSIの代わりに3つの信号制御電圧源(SCVS)を使用することを意味します。このモデルは、電力変換器のスイッチング効果を考慮する必要がないマイクログリッドアプリケーションにおけるAHFの動作を示すことを目的としています。
モデルの説明
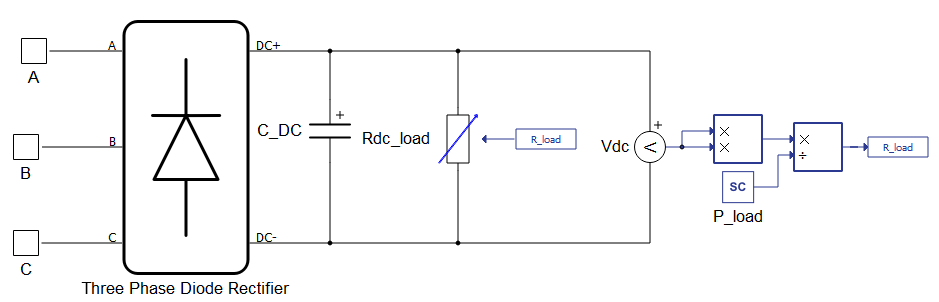
El_Machine_subsystemは、三相ダイオード整流器とDC側の可変抵抗器で構成されています。負荷電力はSCADA入力を介して制御されます(図3 )。制御設計では、システムは3線式システムであり、負荷電流と波形は120度ずつ順次シフトすることを除いて同一であると想定しています。
制御部は、図4に示すように、基準電流発生器と電流制御ループで構成されています。
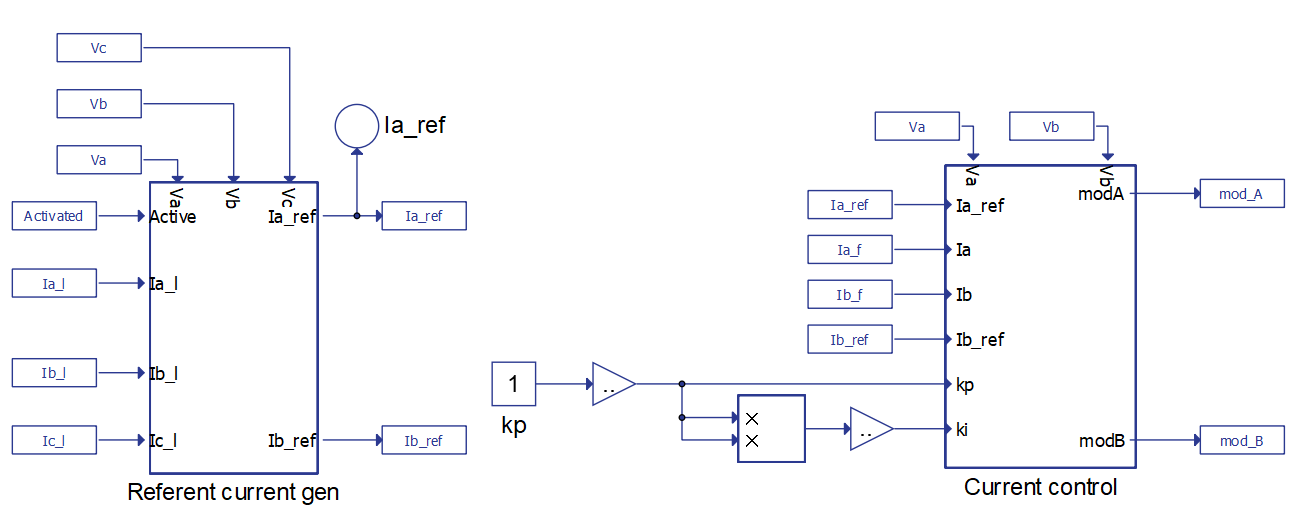
図5に示す基準電流生成は、dqフレームを用いて計算されます。abc -dq変換に必要なグリッド測定は、三相PLLを介して取得されます。d電流とq電流の交流成分は、高周波高調波に対応します。したがって、これらがフィルタ出力電流として必要な電流です。
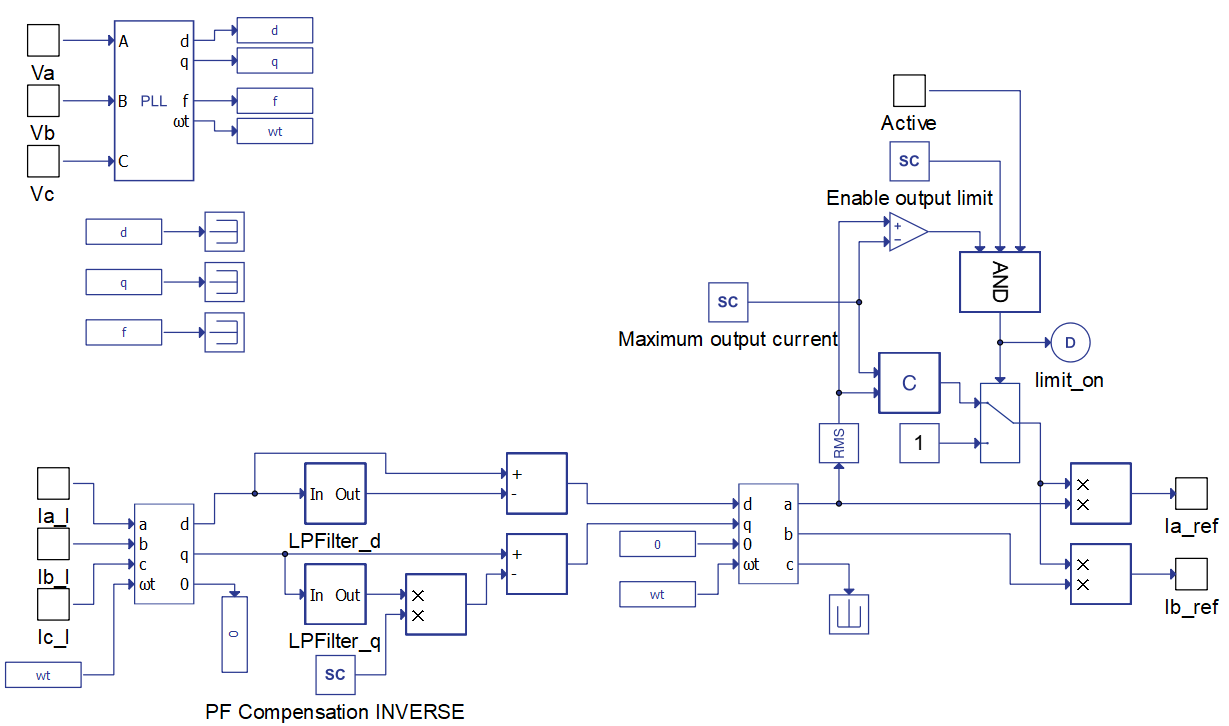
このモデルには、力率(PF)補償の有効化/無効化とフィルタ出力電流制限の有効化/無効化のオプションがあります。後者のオプションは、コンバータの電流定格により、現実世界のアクティブフィルタの出力が制限されることを想定しています。PF補償オプションを有効にすると、q電流全体が補償されます。出力電流が制限されている場合、シンプルなアルゴリズムによって基準電流が調整され、電流制御ループに送られます(図6 )。
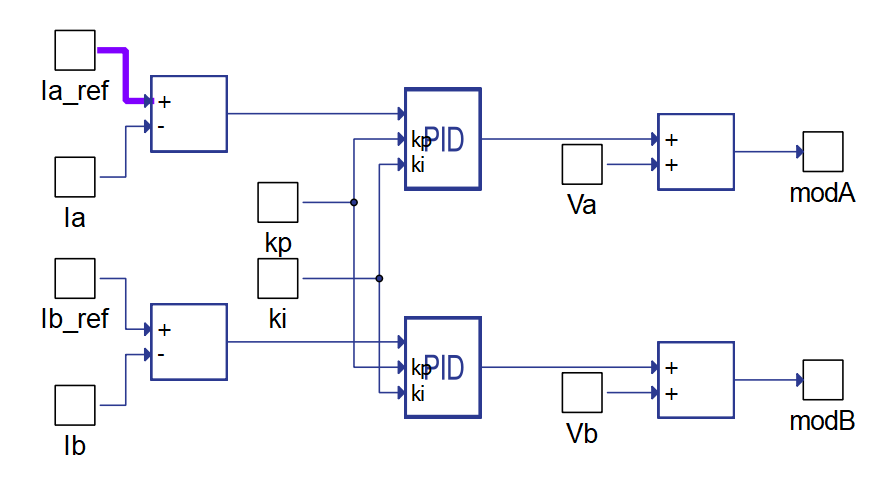
電流制御ループには、2つの比例積分(PI)レギュレータが含まれています。これらの各レギュレータでは、誤差電流が処理され、電源を系統に接続するインダクタに必要な電圧に変換されます。系統相電圧の瞬時値を加算することで、SCVSに必要な電圧が得られます。前述の負荷電流に関する仮定により、3つの電圧の合計は必ずゼロになるため、3つ目の電圧値を計算する必要がありません。
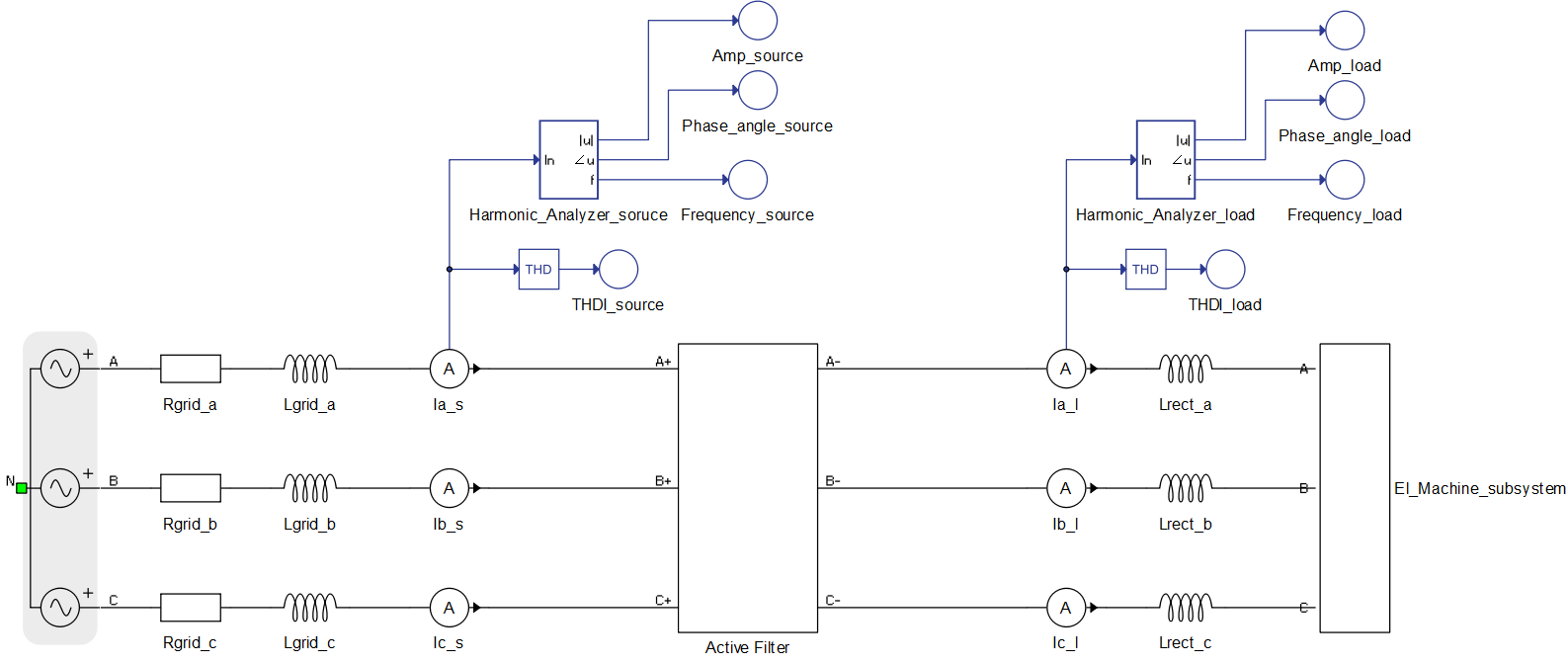
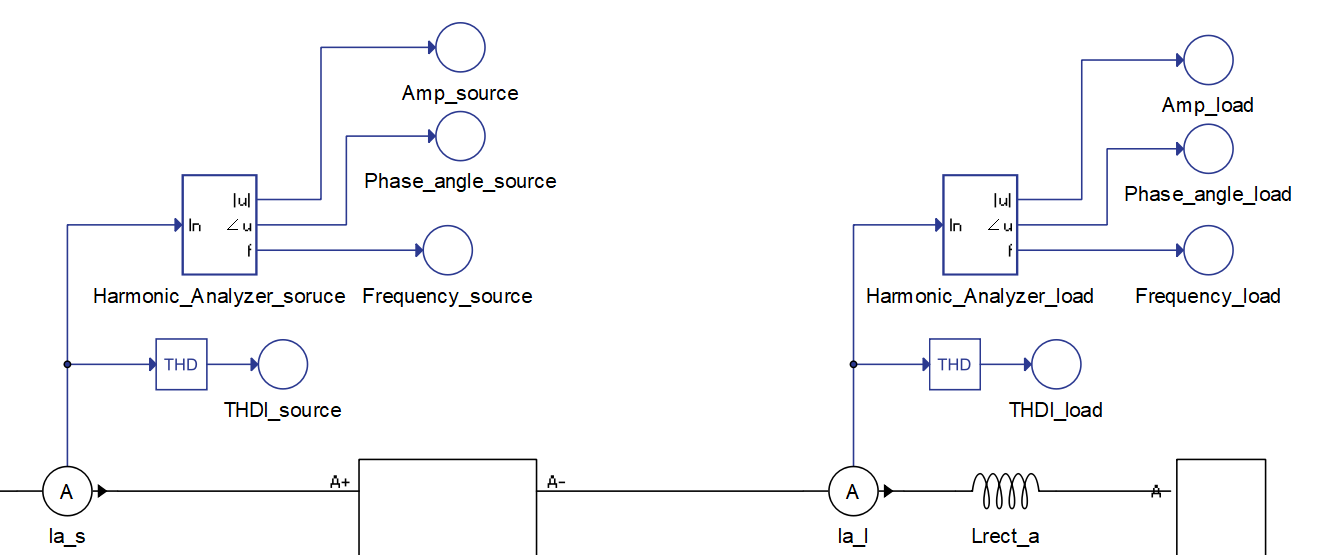
必要な高調波の測定は、図7に示す高調波アナライザコンポーネントを用いて行います。このモデルには2つの高調波アナライザコンポーネントがあり、1つはグリッド側電流の高調波測定に、もう1つは負荷側電流の高調波測定に使用されます。測定対象となる高調波は、高調波アナライザコンポーネントにリストとして入力します。
シミュレーション
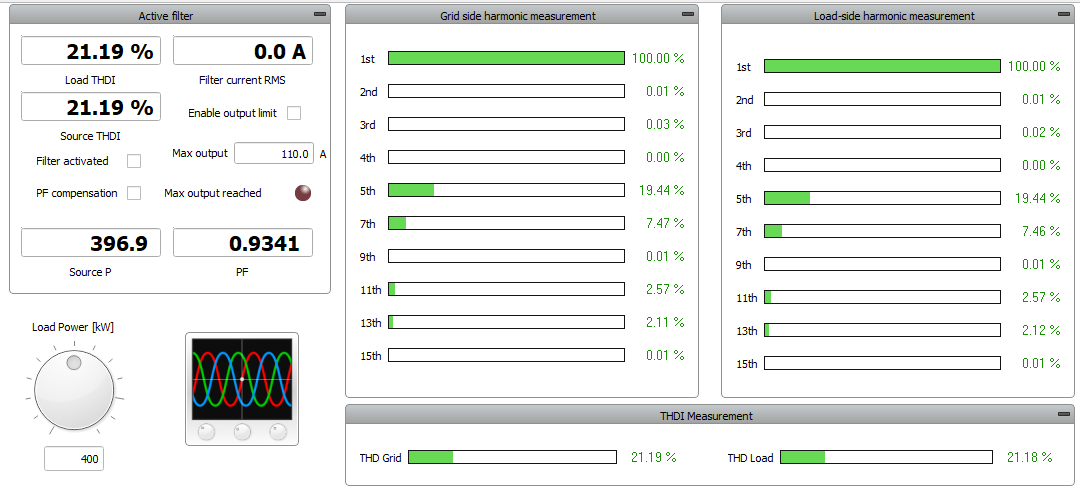
このアプリケーションには、あらかじめ構築されたSCADAパネル(図8 )が付属しています。このパネルには、実行時にシミュレーションを監視および操作するための主要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
アクティブフィルタサブパネルのウィジェットのグループは、AHF を操作するために使用されます。グリッドの負荷側とソース側の両方での全高調波歪みの測定を観察し、RMS 電流をフィルタリングし、有効電力と力率の測定を実行できます。フィルタ、PF 補償、および出力フィルタの電流制限は、チェックボックスウィジェットを使用して有効/無効にできます。最大出力電流は変更可能で、最大出力に達すると、このイベントを通知するために LED が赤く点灯します。ノブウィジェットを使用して、必要な負荷電力を kW 単位で調整できます。SCADA パネルの中央には、3 つの異なるサブパネルがあり、グリッド側と負荷側の高調波が棒グラフで表示されます。高調波の値は、基本電流値のパーセンテージとして表示されます。
シミュレーションを開始すると、Capture/Scope ウィジェットで、負荷電流、ソース電流、グリッド電圧の波形を観察できます。負荷 THDI は、広い範囲の値で変化する可能性があります。電流波形に大きな影響を与えるパラメーターは、グリッドと整流器間のインダクタンスです (Lrect_x、x は 3 つの相 a、b、または c のいずれかを表します)。このモデルでは、これらの値を 0.2 mH 未満に保つことをお勧めします。デフォルトでは、0.15 mH に設定されています。マシンの消費電力は、100 kW から 1 MW までの範囲でテストされます。マシンの電力定格が上がるにつれて、よく知られている 3 相ダイオード整流器の電流波形を維持するために、Lrect_x インダクタンスの値を減らす必要があることに注意してください。
実行レートが100µsの場合、ソースTHDIは4%未満になると予想されます。基準電流には高周波高調波が含まれるため、高速応答が必要です。したがって、100µs未満の実行レートではアクティブフィルタコンポーネントを実行しないことを推奨します。フィルタがアクティブになると、グリッド電流波形はほぼ正弦波になり、ソースTHDIは非常に低くなると予想されます。PF補償オプションの効果を図9と図10に示します。
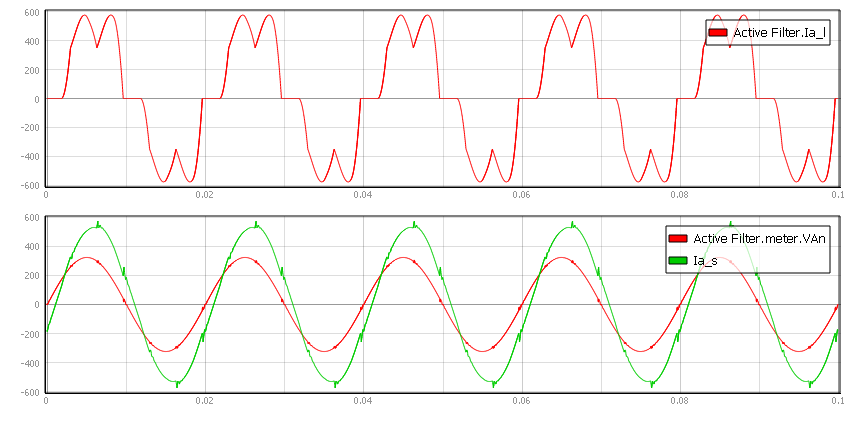
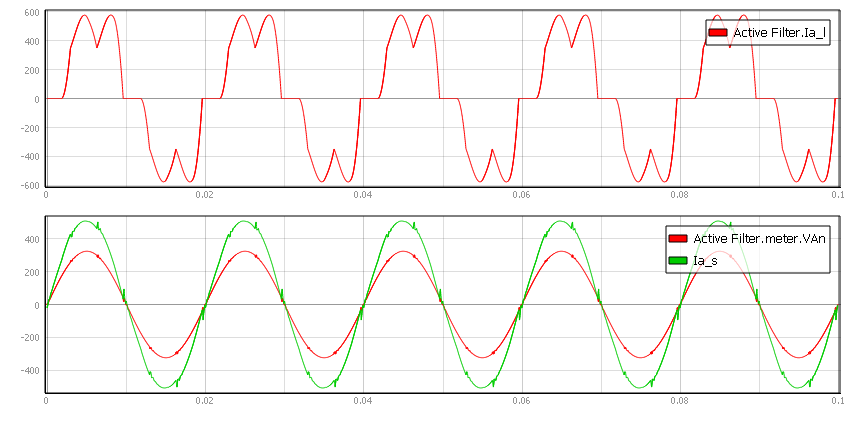
図9では、電源電圧と電流の間に位相オフセットがあることがわかります。この状況では、PF測定値は0.9518を示しています。一方、図10では、電源電圧と電流の間に位相差がなく、PF測定値が1.0000であることからもそれが確認できます。どちらの場合も、THDIは約26.4%から約3%に減少しています。
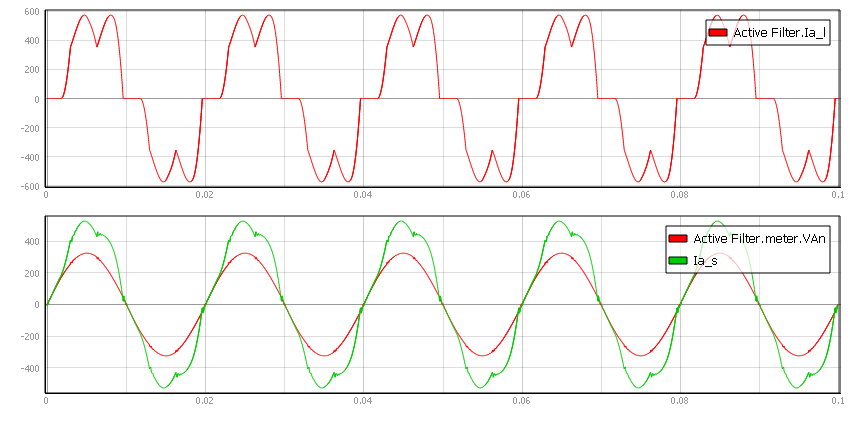
出力電流制限を図11に示します。負荷電力が250kWで、PF補償ありの歪みが27.9%の場合、フィルタのRMS電流は158Aです。最大出力を例えば110Aに設定し、出力制限を有効にすると、電流制御アルゴリズムにより、フィルタは110Aを超えるRMS電流を供給できなくなります。このことから、電源電流波形が純粋な正弦波ではないことが容易にわかります。これは、電源THDI測定でも確認されており、歪みは8.8%となっています。
この場合、PF補償を無効にすることができます。つまり、フィルタ出力電流は107 Aとなり、これは制限値を下回ります。その結果、高調波歪みは再び2.93%に低減され、波形は図9と同じになります。つまり、実際のアプリケーションでは、非線形負荷(この例のような)に110 Aフィルタを組み込むことで、高調波歪みは補償できますが、PFは補償できないことを意味します。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル |
例\モデル\電力品質\アクティブフィルタ\アクティブフィルタ(平均) アクティブフィルター avg.tse アクティブフィルタ平均カス |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL402 |
| デバイス構成 | 4 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 1 |
| 最大マトリックスメモリ使用率 | 77.37% |
| 最大時間枠利用率 | 73.75% |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
参考文献
著者
[1] ヨヴァン・ゼリッチ
[2] クリスチャン・モナール