二重給電誘導発電機付き風力タービン
バックツーバック周波数変換器を介してステータに接続されたローターを備えた二重給電誘導発電機 (DFIG) を使用して、タイプ 3 風力タービンの機能と通常の動作をデモンストレーションします。
導入
バックツーバックコンバータを備えた二重給電誘導発電機(DFIG)は、風力タービンでよく使用されるシステムです。従来の風力タービンは回転速度が固定ですが、DFIGは風力タービンを様々な速度範囲で動作させることを可能にします。バックツーバックコンバータはDFIGのローターに接続され、ローターに可変周波数の電流を供給して、所望のローター速度に達することを目的としています。このアプリケーションノートでは、バックツーバックコンバータコントローラを備えたDFIG風力タービンの実装例を示します。本稿で紹介するシミュレーション事例は、風速変化およびタービンブレーキ動作時におけるDFIGの動的応答を網羅しています。
風の運動エネルギーの形で含まれる力P v は次のように表されます。
どこ Vv は、受風区域内の平均風速です。 ここで、Rはローターブレードの直径、ρは空気密度である。風力タービンは、その電力の一部しか回収できない(Pt):
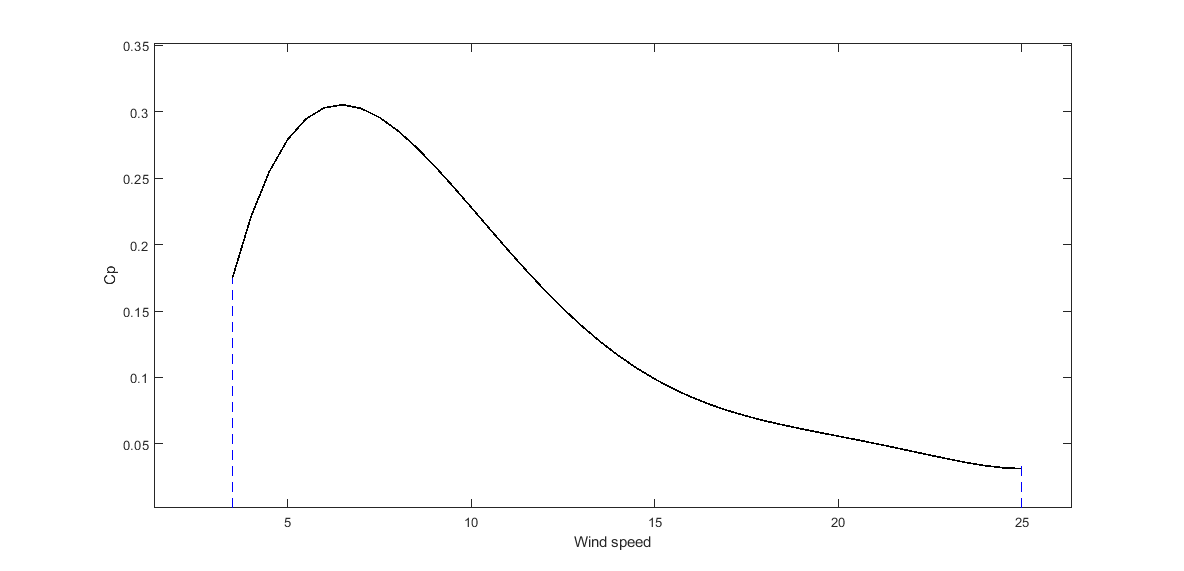
電力係数 C p は、風力タービンが風の運動エネルギーを機械エネルギーに変換する効率を表す無次元パラメータです。この係数は、風速、ローターブレードの速度、およびピッチ角の関数です。DFIGモデルを用いた風力タービンでは、ローターブレードの長さは次のように設定されています。 R = 50メートル空気密度は ピッチ角は自動的に調整され、 C p は、 図1:
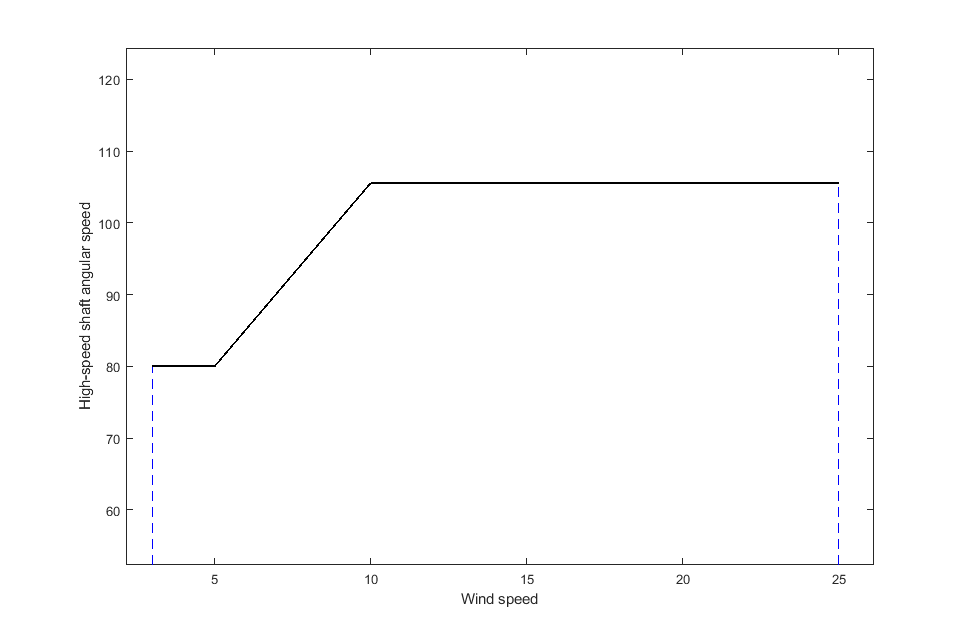
前述のように、ローターブレードは様々な速度で回転します。図3は、風速に対する高速軸の角速度の曲線を示しています。このグラフは複数のゾーンに分割でき、各ゾーンでは角速度の変化が異なります。機械が現在どのゾーンで動作しているかに応じて、DFIGの異なる制御が実行されます。
風速と出力係数に基づいて、高速軸にかかる機械的トルクを計算できます。ローター側コンバータ制御は、現在の機械的トルクに基づいてローター速度を調整するように設定されています。この依存性は図3に示されています。
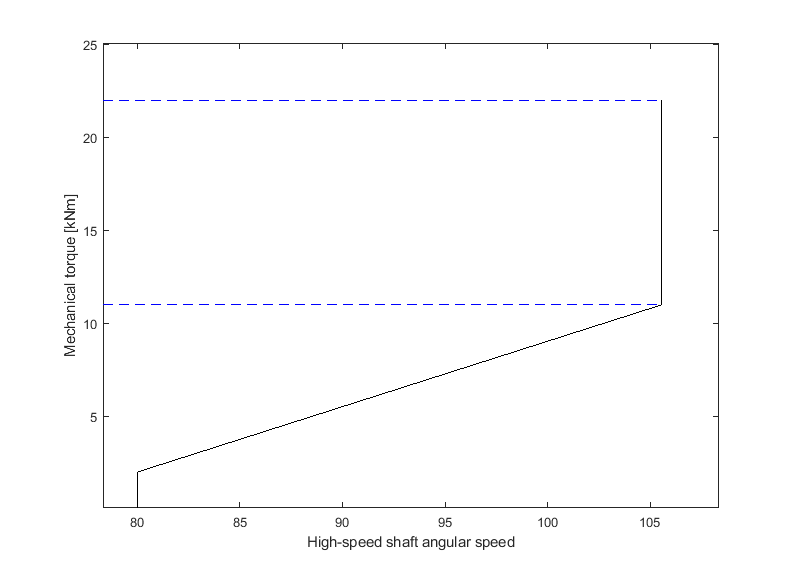
公称定格(機械の機械的トルクおよび角速度)は、 図3 両方の値の最大値として、公称機械的トルクが 20006 Nm一方、発電機の公称角速度は これらの公称定格は、風速が 、そして風速が機械にとって強すぎると判断されるまで維持されます(この場合、 )。
モデルの説明
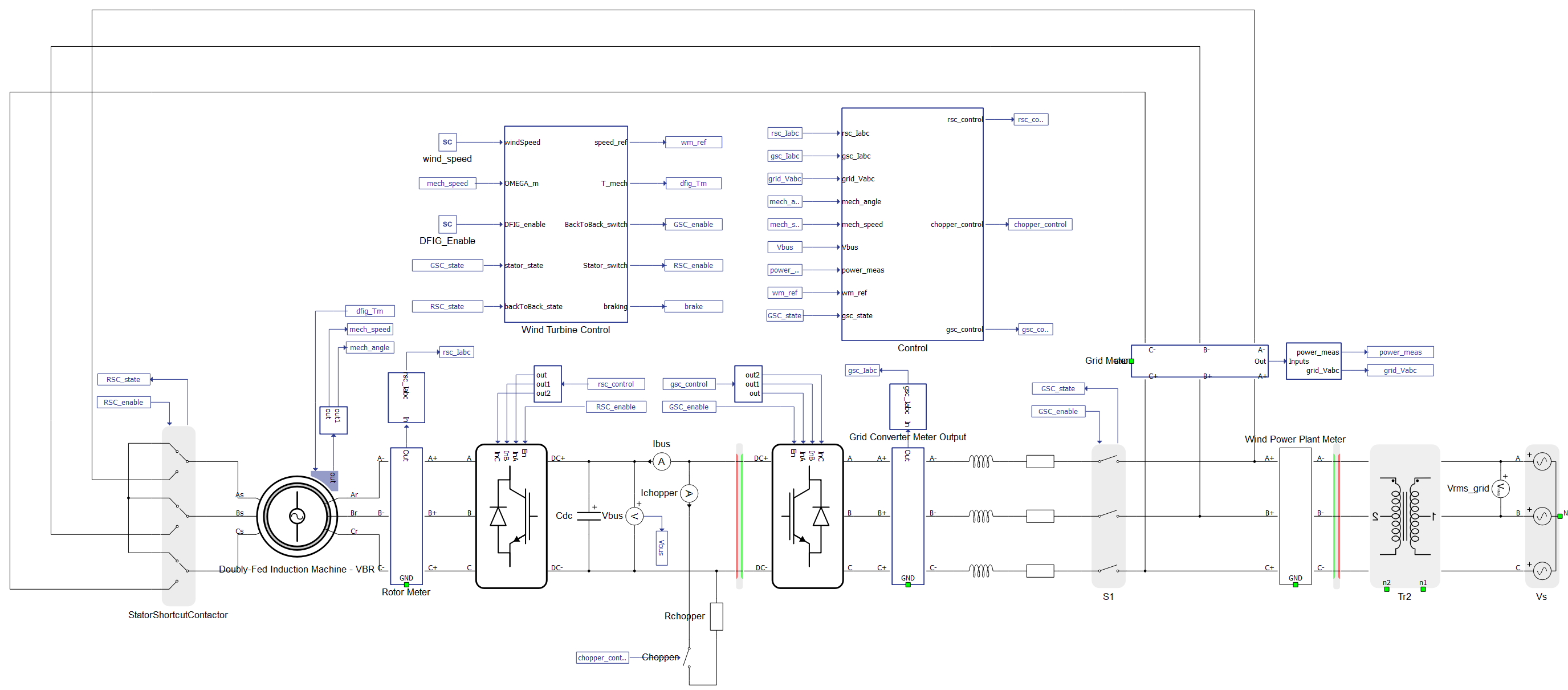
図4は、バックツーバックコンバータモデルを備えたDFIGを示しています。ステータコンタクタはステータ側(左下)に、コンバータコンタクタはバックツーバックコンバータ側(右下)に表示されています。これらのコンタクタの目的は、風速が動作範囲外になった場合、またはブレーキが作動した場合に、DFIGとバックツーバックコンバータを系統から切断し、ローター速度をゼロにすることです。コンタクタはコンタクタ制御サブシステムで制御されます。
風力タービン制御サブシステムには、風速に基づいて機械トルクと速度指令値を計算するC関数が含まれています。また、DFIGがどの動作モードを実行しているかを判断します。
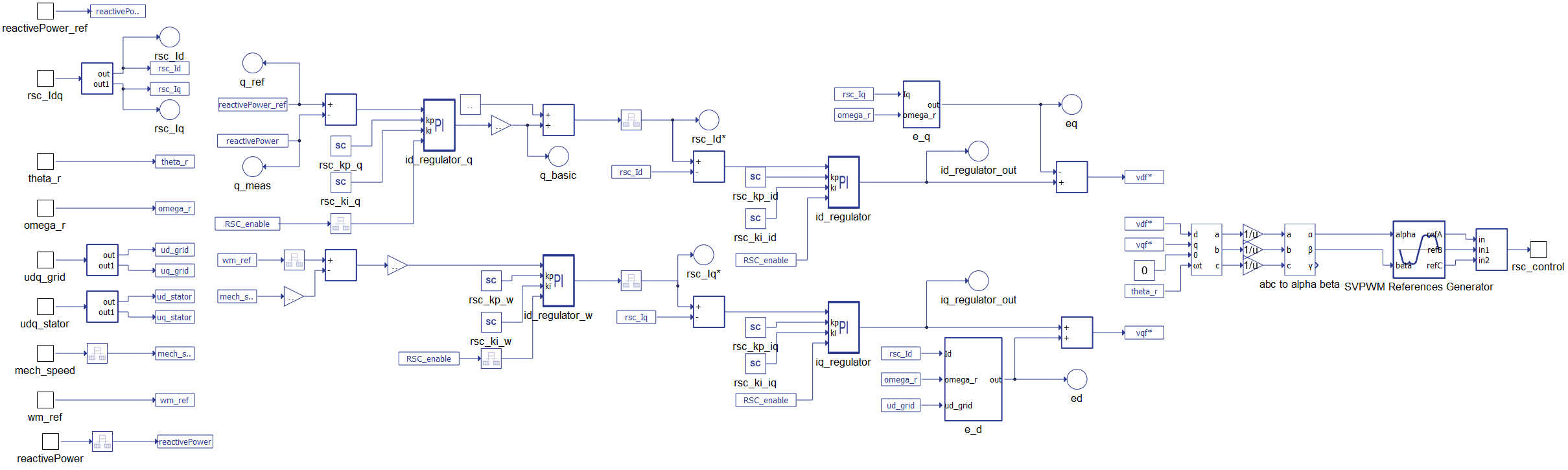
図5は、ベクトル制御が実装されているローター側コンバータ制御サブシステムです。この制御は、ローターに必要な速度に到達するために、定常状態において異なる振幅と周波数の電圧をローターに供給する役割を担っています。入力「omega_r」は、風速入力に基づくC関数の出力として、この制御に入力されます。
最も重要な公称値は表 1に示されています。
| 変数名 | 公称値 |
|---|---|
| グリッドライン電圧 | 690 V |
| DFIG公称電力 | 2250kW |
| 適切な風速 | 3~25メートル/秒 |
| 公称ローター速度 | 105.56 rad/s |
| 公称固定子電流 | 2241 A |
| バックツーバックDCリンク範囲 | 950~2000V |
| バックツーバックインバータキャリア周波数 | 4000 Hz |
シミュレーション
このアプリケーションには、あらかじめ構築されたSCADAパネル(図6 )が付属しています。このパネルには、実行時にシミュレーションを監視および操作するための主要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
最初のシミュレーション例では、風速の変化が に モデルの状態に応じて、SCADAパネルで風速を変更すると、それに応じてローターシャフトの速度、出力、外乱が変化します。 Vバス HIL SCADAのトレースグラフで確認できます(図6)。また、風力発電機のオン/オフは、 マシンを有効にする チェックボックスをオンにしてください。コンタクタ(ステータとバックツーバックコンタクタ)の状態はSCADAパネルでも確認できます。レギュレータのPIパラメータは、SCADAを通じて、 テキストボックス ウィジェット。
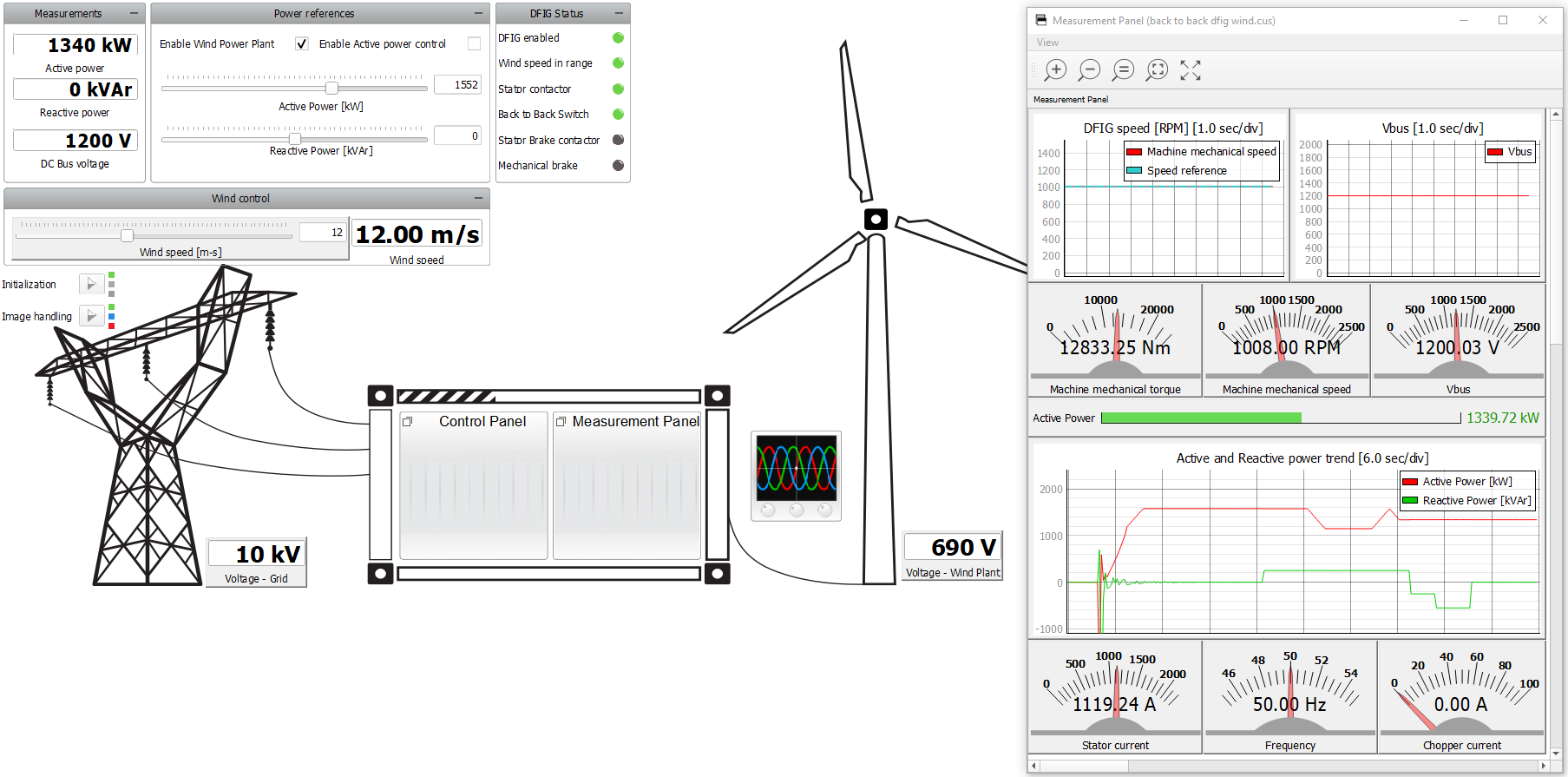
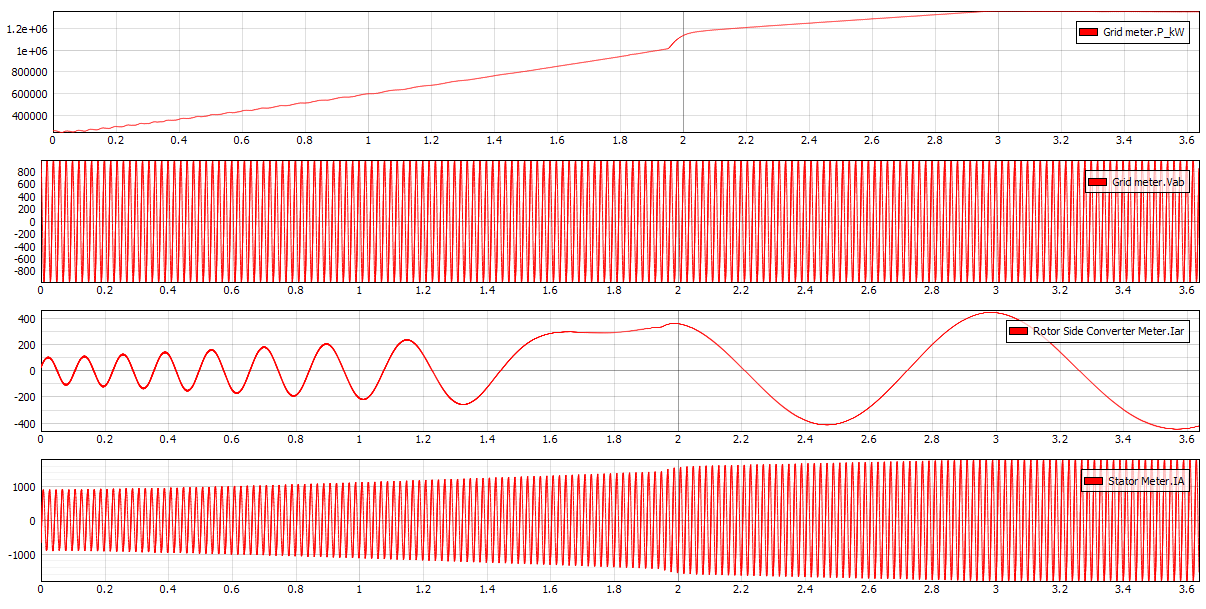
図 7では、三相メータ コンポーネントによって測定された、電力出力、ローター電流とステーター電流、および一定線間電圧の変化を確認できます。
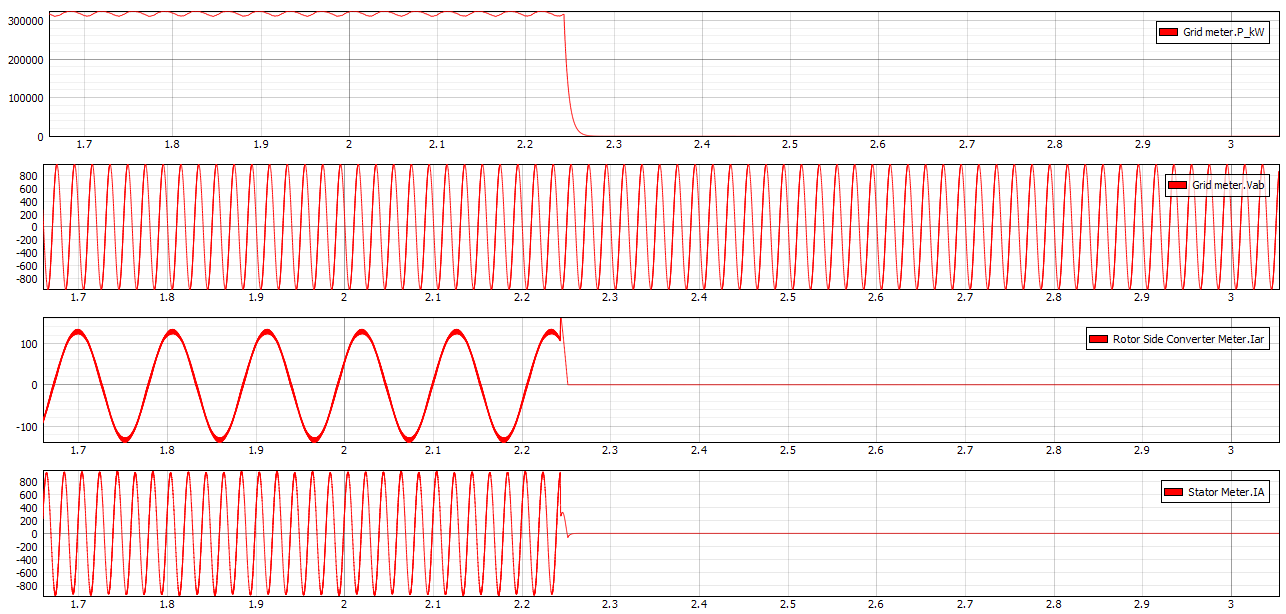
風速が高すぎる場合、またはDFIGを手動で無効にした場合、軸に逆の機械的トルクが加えられ、速度がゼロになります(これによりブレーキをシミュレートします)。このプロセスに加えて、DFIGとバックツーバックはグリッドから切断され、 Vバス ゼロに落ち始める。このプロセスは、 図8、風速が以下の場合にDFIGを手動で無効にすると、 .
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表2は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\系統接続コンバータ\バックツーバック風力発電 背中合わせのdfig wind.tse 背中合わせのdfig wind.cus |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL506 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 3 |
| 最大マトリックスメモリ使用率 | 1.07% (コア2) 94.85% (コア1) 37.87% (コア0) |
| 最大時間枠利用率 | 23.93% (コア2) 29.64% (コア1) 25.36% (コア0) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
著者
[1] ディミトリエ・イェリッチ