仮想同期機を備えた系統接続インバータ
系統安定性の維持を支援する系統接続コンバータの制御実証
導入
同期発電機(SG)は、回転慣性モーメントを介して過渡的な系統安定性に貢献します。系統接続されたコンバータベースの分散型エネルギーリソース(DER)の増加は、電力システムの過渡安定性特性に累積的な悪影響を及ぼします。この問題に対処する一つの解決策は、コンバータ制御をSGのダイナミクスを模倣し、仮想慣性を提供できるように変更することです。このアプリケーションは、仮想同期発電機(VSG)として機能する系統接続インバータのデモンストレーションを行います。
VSGモデル
VSGは、エネルギー源、コンバータ、および制御機構で構成されています。VSG制御ブロックは、以下のSGのスイング方程式に基づいています。
スイング方程式:
電磁トルク:
三相発電電圧:
無効電力:
どこ:
仮想慣性は、VSG の公称電力を最大許容周波数変化率で割った値に比例します。
モデルの説明
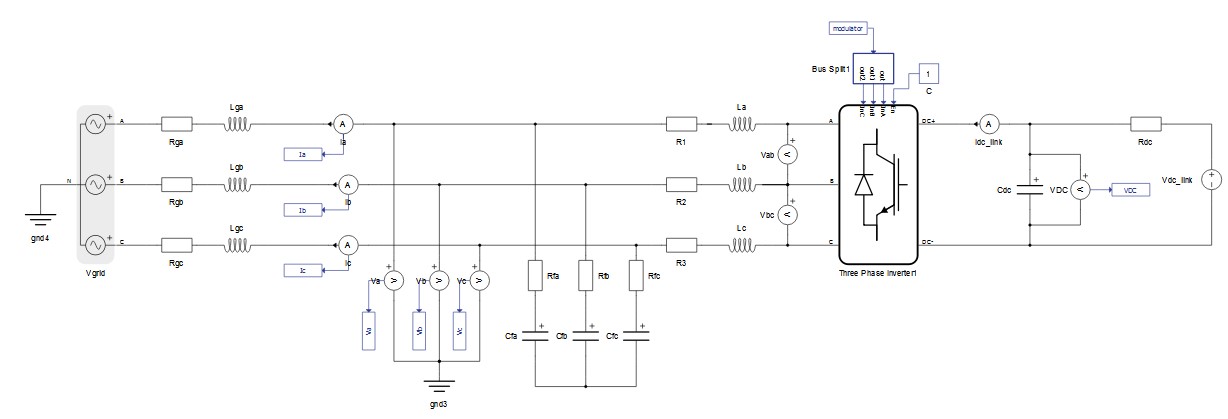
モデルの電気部分を図1に示します。これは三相インバータモデルです。DCリンクへの電力供給には、インバータは理想的なDC電源を使用します。インバータのグリッド側接続は、LCフィルタを使用して実装されています。このモデルのフィルタの推奨パラメータは、C = 20e-6 FおよびL = 2.6e-3 Hです(パラメータはモデル初期化パネルで設定します)。回路図の左側には、RLインピーダンスを持つ三相グリッドがあります。電流と電圧の位相測定用のコンポーネントは、グリッドとインバータの間に配置されています。
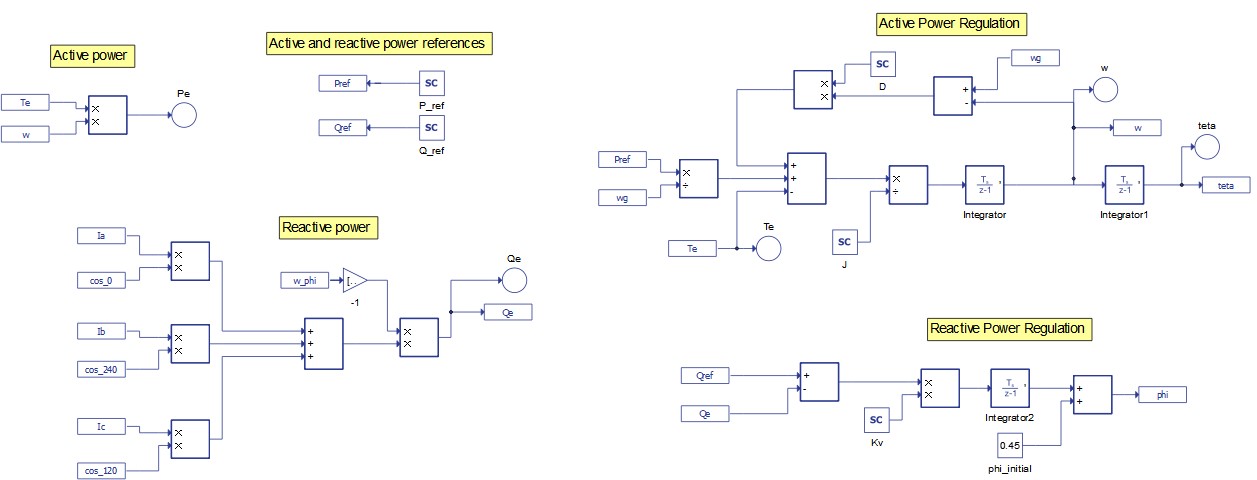
制御部は、図 2に示す有効電力および無効電力制御ループで構成されています。周波数の参照値 (wg) は、モデル初期化パネルで設定されます。有効電力の参照値 (Pref) は、HIL SCADA でスライダーを目的の値に調整することにより設定されます。有効電力ループは、機械摩擦係数 (D) をフィードバック ゲインとして使用します。さらに、このループは VSG の速度を制御し、位相角 theta を生成します。無効電力の参照値 (Qref) は、HIL SCADA でスライダーを目的の値に調整することにより設定されます。このループは位相角 phi を生成し、これはさらにトルク計算とコンバーターの参照信号の生成に使用されます。
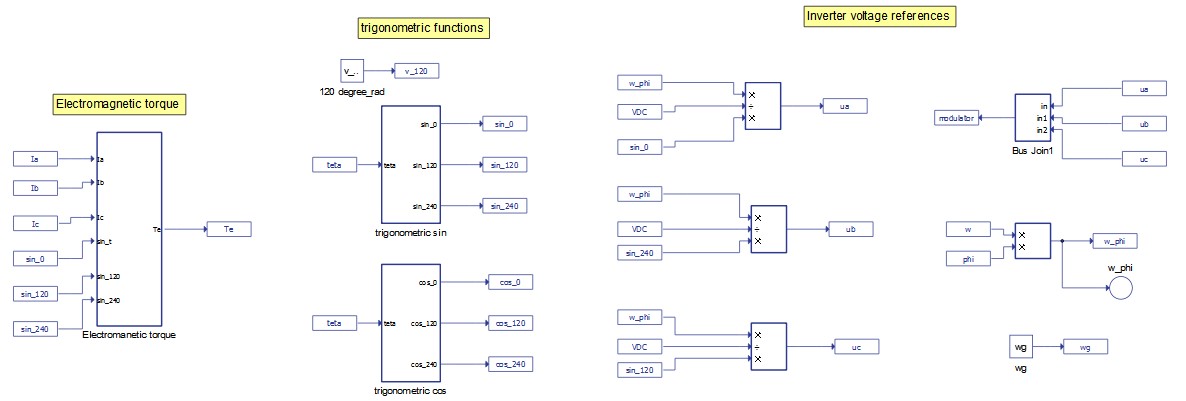
インバータの電磁トルク計算と参照信号を図3に示します。電磁トルク(図3の左側)は、 VSGモデルのセクションで説明したスイング方程式を用いて計算されます。PWM参照信号は、DCリンク電圧(VDC、図3の右側の「インバータ電圧参照」に表示)、無効電力制御ループからのφ角(図2の右下の「無効電力制御」で事前に計算済み)、および正弦変換(図3の中央の「三角関数」で計算済み)を介して生成され、インバータに送られます。
シミュレーション
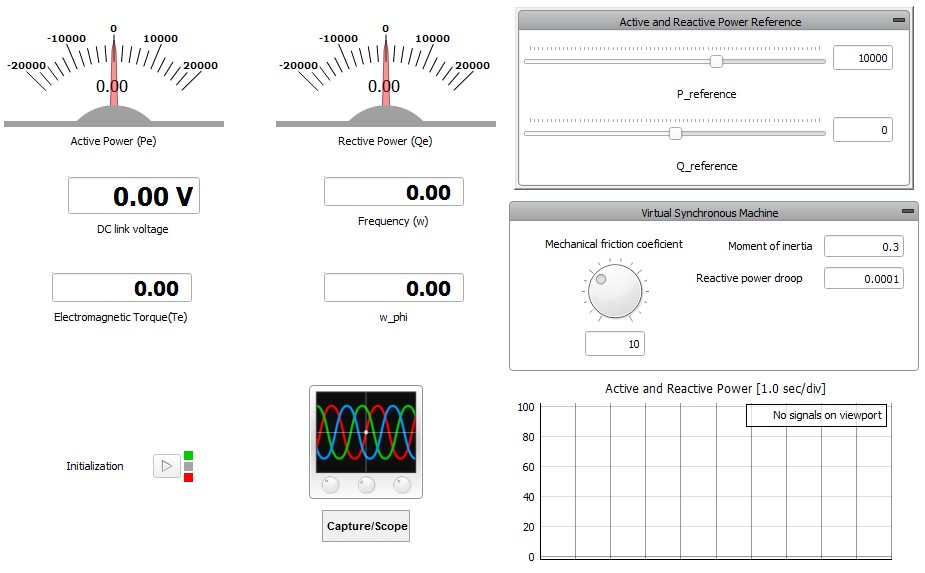
このアプリケーションには、あらかじめ構築されたSCADAパネル(図4 )が付属しています。このパネルには、実行時にシミュレーションを監視および操作するための主要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
このモデルの目的は、インバータが電気機械の慣性に関連する動的効果を模倣できることを示すことです。系統への有効電力注入の過渡応答は、機械摩擦係数 (D) とVSGローターの慣性モーメントに依存します。系統への無効電力注入の過渡応答は、主に無効力率ドループ (Kv) に依存します。有効電力の過渡応答について3つのケースを解析します。いずれの場合も、基準有効電力は5000Wに設定されています。
- 慣性モーメントを J = 0.3 の値に設定している間の機械的摩擦係数 (D) の変化における有効電力応答の過渡状態。
図5 J = 0.3の過渡応答 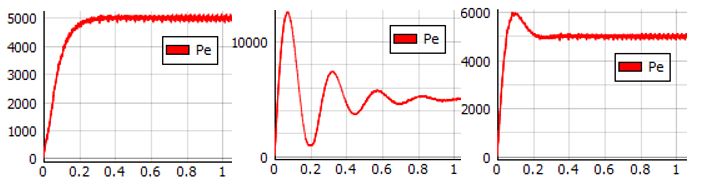
Dの値が高いほど、オーバーシュートなしで定常状態に達する過渡応答が得られます(図5 、左)。Dの値が低いほど、振動応答が得られます(図5 、中央)。この場合、1秒後に定常状態に達します。Dの最適値(図5 、右)では、有効電力は0.2秒で定常状態に達します。
- 慣性モーメントがJ = 0.8まで増加した際のDの変化に対する有効電力応答の過渡応答。これは、より高い定格電力を持つVSGの場合に当てはまります。
図6 J = 0.8の過渡応答 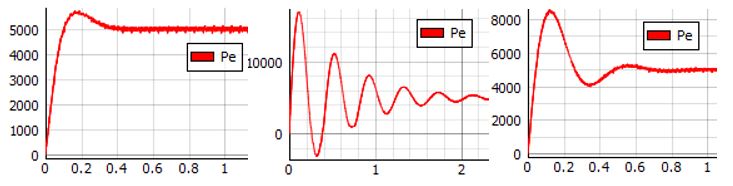
前回の場合と比較すると、慣性モーメントの値が高くなったため、有効電力応答の過渡期間の振動が増加し、定常状態に到達するまでの時間も増加しました。
- 慣性モーメントがJ = 0.1まで減少する間、機械的摩擦係数(D)の変化に対する有効電力応答の過渡応答。これは、定格電力が低いVSGの場合に当てはまります。
図7 J = 0.1の過渡応答 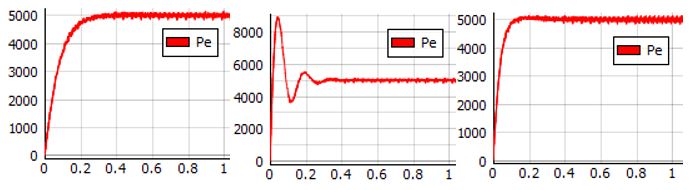
小型のVSGは慣性モーメントが小さいため、有効電力応答の過渡応答がよりスムーズになり、より短時間で目標値に到達できます。
これらの例は、コンバータベースのDERが、与えられた電力定格内で、様々な規模のSGの存在をエミュレートできることを示しています。仮想慣性を提供することでDERのグリッドサポートをモデル化およびテストすることにご興味のある方は、ぜひこのモデルをご利用いただき、フィードバックをお寄せください。
このアプリケーションサンプルは、無料のVirtual HIL Deviceライセンスに含まれており、PC上でシミュレーションできます。サンプルの要件には、モデルのシミュレーションに必要なファイル名と最小ハードウェア要件が記載されています。
テスト自動化
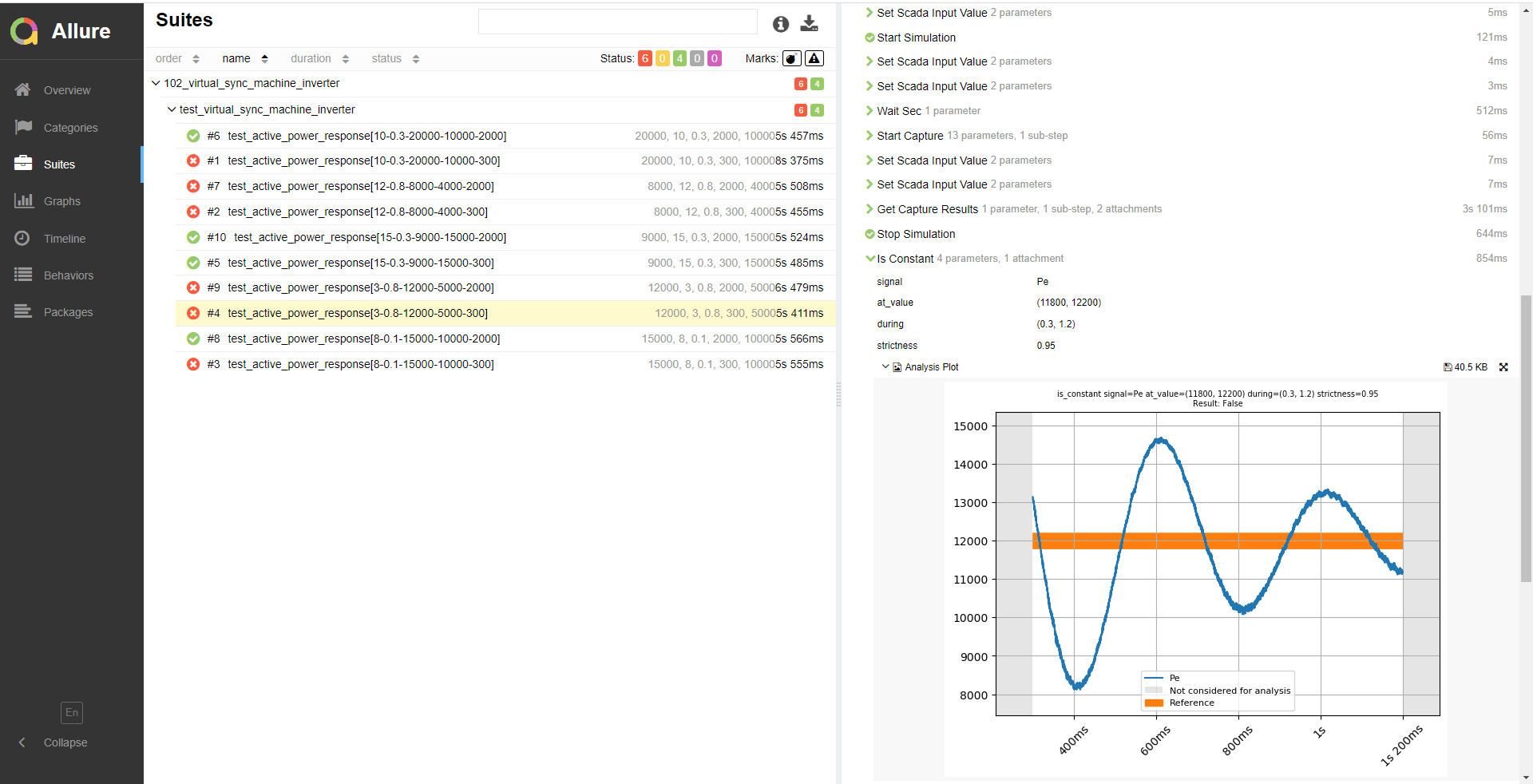
提供されているテスト自動化スクリプトは、機械摩擦係数と慣性モーメントの変動を考慮しながら、インバータの有効電力に対する過渡応答を検証します。このテストでは、8、9、12、15、20kWの有効電力入力を、オーバーシュート許容値0.3kWと2kWを考慮してテストします。図8は、過渡応答が遅く、オーバーシュート許容値が低いテストケースの例です。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\系統接続コンバータ\仮想同期機インバータ 仮想同期マシンインバーター.tse 仮想同期マシンインバータ.cus 例\テスト\102_仮想同期マシンインバータ test_virtual_sync_machine_inverter.py |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 1 |
| 最大マトリックスメモリ使用率 | 28.59% (コア0) |
| 最大時間枠利用率 | 45.91% (コア0) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 250マイクロ秒 |
著者
このアプリケーションノートに掲載されているモデルは、当社の学術パートナーによって作成されたものです。分野固有のご質問については、アプリケーションのオリジナル作成者に直接お問い合わせください。
[1] フェリペ・ボヴォリーニ・グリゴレット教授( grigoletto@gmail.com )
[2] ブラジル、パンパ連邦大学 (UNIPAMPA) の Marcio Stefanello 教授 ( marciostefa@gmail.com )。