C-HIL: Texas Instruments TMS320F2808 カードを使用した PMSM のフィールド指向制御
Texas Instruments カードを使用して、TMS320F2808 コードのラピッド コントロール プロトタイピングとリアルタイム HIL テストを実行する方法のデモンストレーション。
導入
Texas Instrumentカードは、Texas Instrumentファミリーのデジタル信号プロセッサ(DSP)向けパワーエレクトロニクス(PE)アプリケーションの開発を加速させたい方に最適なハードウェアです。Texas Instrumentカードで適切なテストを実施できるよう、Typhoon HIL Control Centerは、電力変換器、電気機器、フィルタ、配電網、太陽電池、受動素子などを含むPEデバイスの電力ステージをエミュレートします。これにより、電力実験室(P-HIL)環境で求められる安全対策を気にすることなく、制御アプリケーションを開発し、すぐにテストと検証を開始できます。
この例では、Texas Instruments TMS320F2808カードの外部コントローラを使用して、Typhoon HILソフトウェアに実装されたモデルを制御する方法を示します。特に、このセクションでは、モデルを外部コントローラに接続し、それらを連携させる方法に焦点を当てます。このケーススタディでは、特定のTexas Instruments制御カードを例として使用していますが、一般的なプロセスは、入手可能なさまざまなカードに適用できます。
モデルの説明
このモデルは、単相整流器、三相インバータ、および永久磁石同期機で構成されています。単相整流器と三相インバータのコンポーネントはConverterライブラリから直接取得され、永久磁石同期機はMachinesライブラリから取得されます。
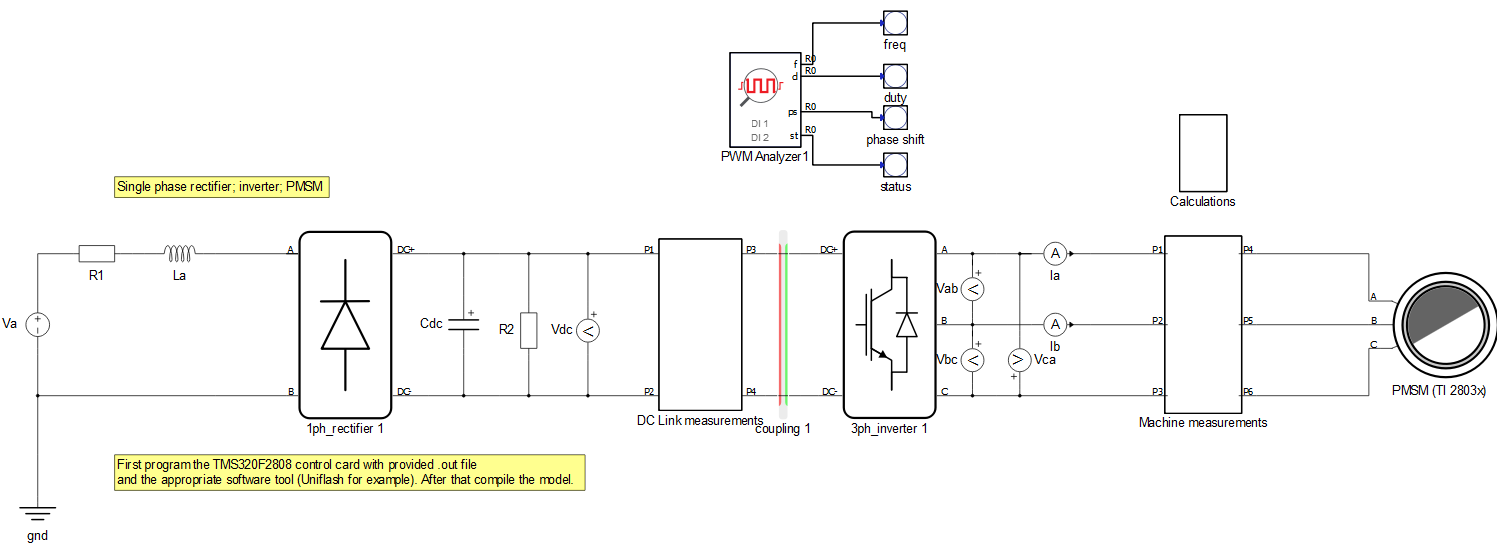
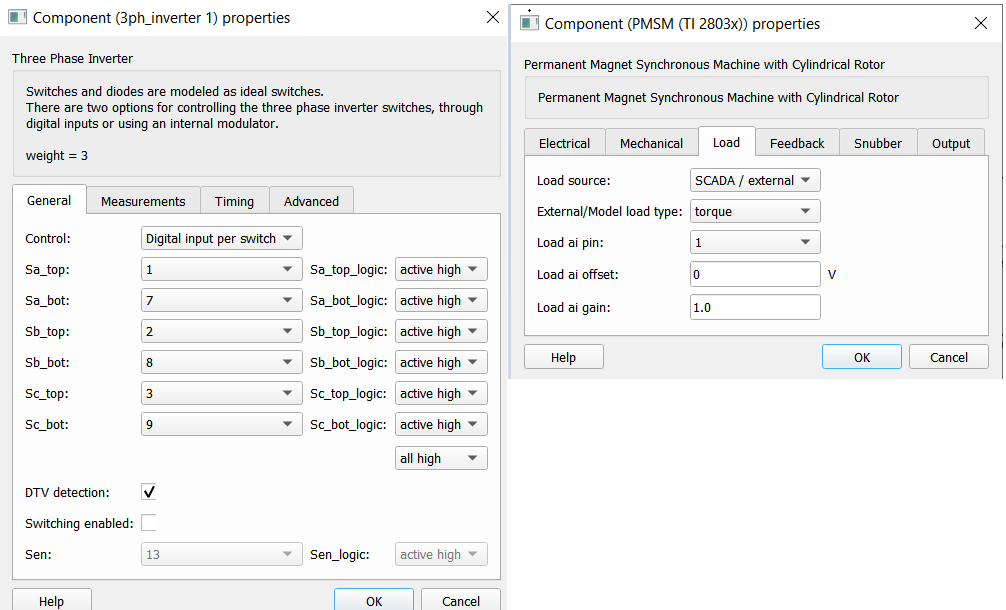
図1に示すように、このモデルには電気部品のみが含まれており、モデル内のすべてのコンポーネントは、コンポーネントのプロパティを変更することで外部から制御されます。三相インバータの動作モードは「スイッチごとのデジタル入力」に設定され、永久磁石同期機の負荷は「SCADA / 外部」に設定されています(下の図2を参照)。
モデルをコンパイルする前に、プログラムコードをTMS320F2808制御カードにアップロードする必要があります。そのためには、このドキュメントに付属の.outファイルと適切なソフトウェアツール(UniFlashなど)が必要です。UniFlashは、TIマイクロコントローラ(MCU)のオンチップフラッシュメモリおよびオンボードフラッシュメモリをプログラムするためのスタンドアロンツールです。無料でご利用いただけます。カードを正常にフラッシュするには、 「TIカードのフラッシュ方法」の手順に従い、シリアルポートウィジェットを使用する必要があります。
シミュレーション
このアプリケーションには、図3に示すような、あらかじめ構築されたSCADAパネルが付属しています。シミュレーションの実行中に監視や操作を行うための最も重要なユーザーインターフェース要素(ウィジェット)が提供されており、ニーズに合わせてさらにカスタマイズできます。
シミュレーションを開始する前に、設定ファイルを読み込み、シミュレーションを実行してください。設定ファイルは、アナログ出力とスケールをTIコントローラにABZ信号として送信します。さらに、エミュレートされた機械エンコーダ信号のデジタル出力設定も含まれており、ABZ反転信号として送信されます。設定ファイル(.runx)は、モデルおよびSCADAファイルと同じフォルダに保存されており、ソフトウェアによって自動的に提供されます。
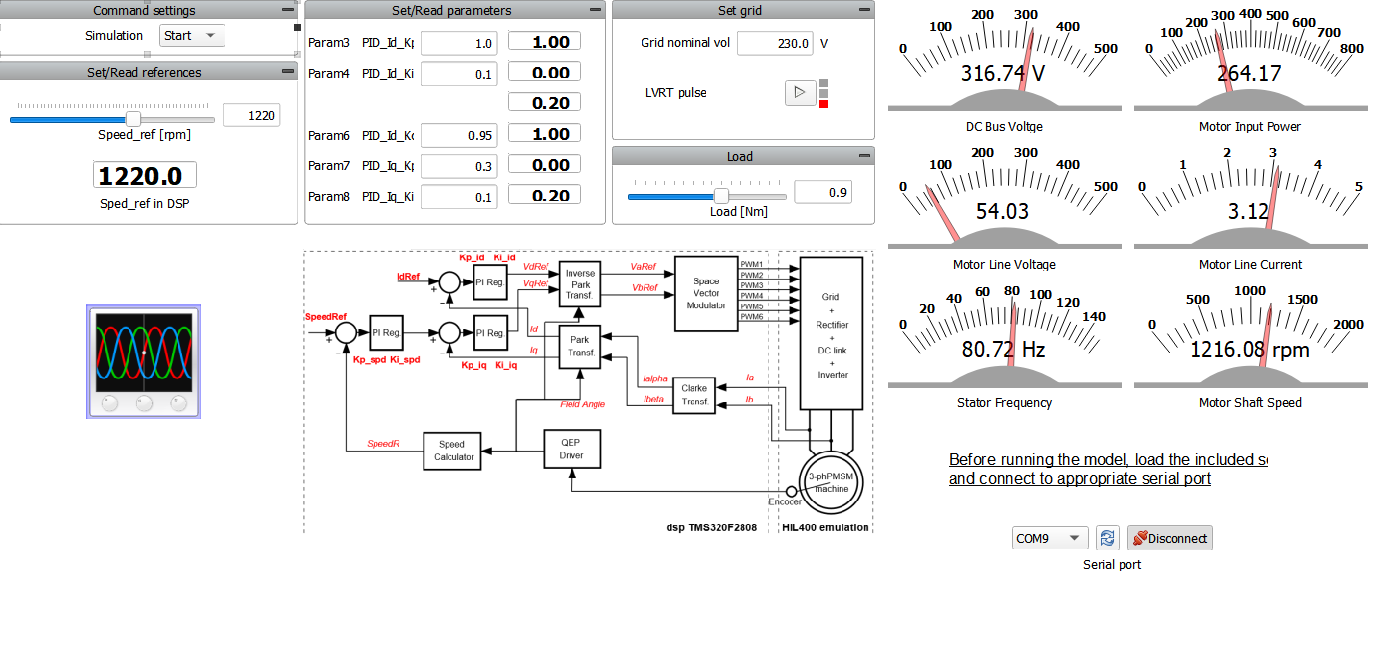
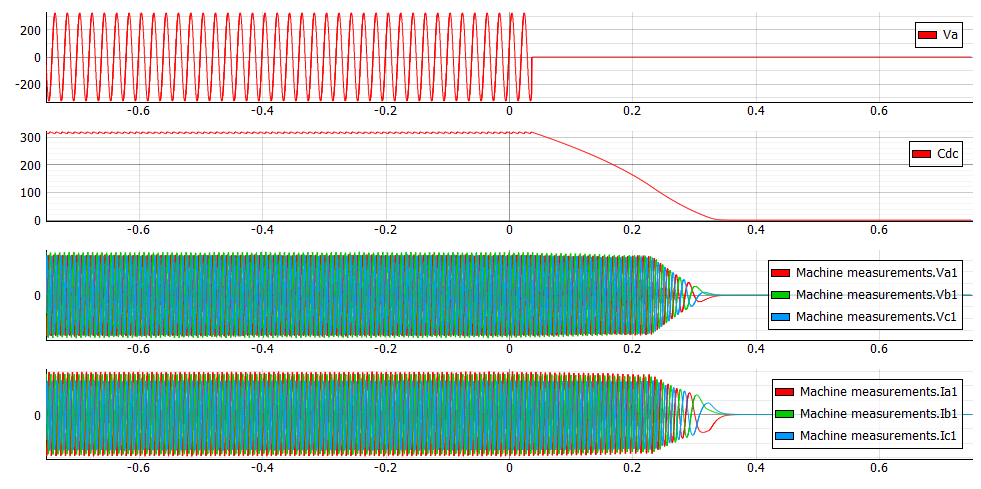
シミュレーションを操作するには、参照速度を設定する必要があります。この参照速度はシリアルポートウィジェットを介してTIカードに送信され、TIカードはHIL入力に参照速度を送信します。図4は、設定された参照速度に応じたモーターの挙動を示しています。
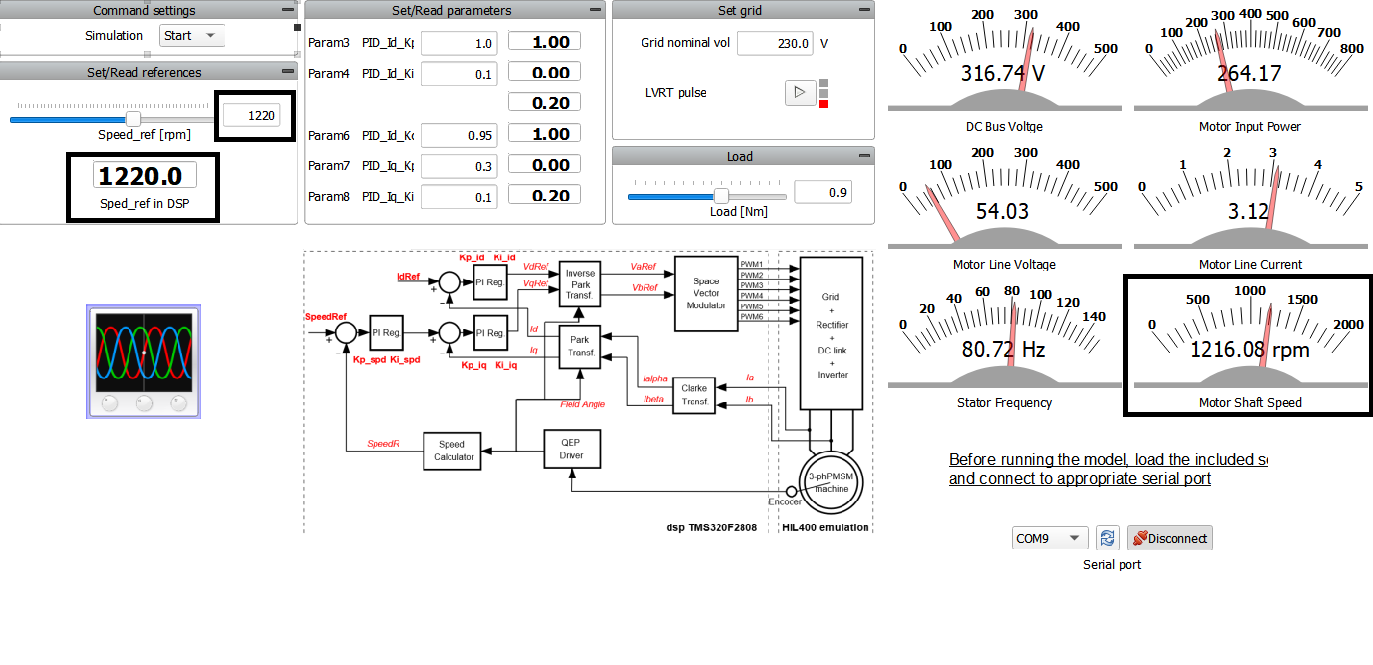
PIDからパラメータを変更することもできます。これは「パラメータの設定/読み取り」グループで行います(図4の「パラメータの設定/読み取り」を参照)。
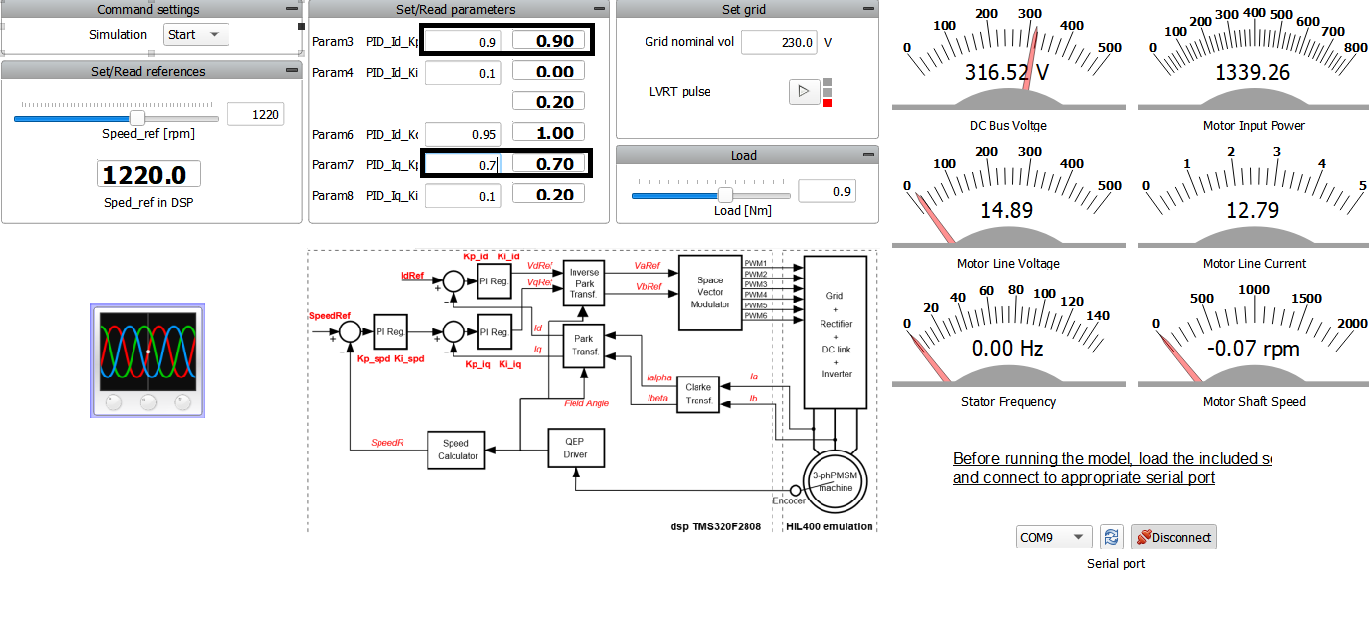
系統電圧は手動で変更するか、LVRT(低電圧ライドスルー)パルスマクロボタンを使用して変更できます。LVRTとは、系統電圧が短時間低下した場合でも発電機の接続を維持する機能です。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | TMS320F2808 サンプルモデル/ti pmsm センサー付きフォーカス* ti pmsmセンサー付きfoc.tse ti pmsmセンサー付きフォーカス 20140220_pmsm3_1_TMS3202808.out 設定.runx *パッケージマネージャー経由でダウンロード可能 |
| 外部ツール | ユニフラッシュ |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL402 |
| デバイス構成 | 1 |
| インタフェース |
TMS320F2808 (テスト対象ハードウェア) |
| HILデバイスのリソース利用 | |
| 処理コア数 | 2 |
| 最大マトリックスメモリ使用率 | 2.25% (コア0) 30.81% (コア1) |
| 最大時間枠利用率 | 29.38% (コア0) 52.5%(コア1) |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
著者
[1] ヨヴァナ・マルコビッチ