C-HIL: Texas Instruments LAUNCHXL-F28379D LaunchPadを使用したPMSMトルク制御
Texas Instruments LaunchPad 開発キットを使用して、リアルタイムでエミュレートされた電気駆動モデルの制御を実装する方法のデモンストレーション。
導入
Texas Instruments (TI) F28379D LaunchPad開発キットは、高度な制御システム開発のための高性能デュアルコアマイクロコントローラアーキテクチャを搭載しています。産業用ドライブ、インバータ、モーター制御などのアプリケーションにリアルタイム制御アルゴリズムを導入できます。制御アルゴリズムを適切に検証するには、C-HILテストセットアップを使用できます。このセットアップでは、 HIL TI Launchpadインターフェースボードを使用して、TI LaunchPadをTyphoon HILリアルタイムシミュレータに接続します。これにより、Typhoon HILツールチェーンを使用してプラントをリアルタイムでシミュレーションしながら、実際のマイクロコントローラにコントローラを実装できます。
このサンプルモデルは、永久磁石同期機(PMSM)モータ駆動装置を、磁界方向制御(FOC)方式を用いて制御し、機械の電気トルクを制御します。FOCアルゴリズムは、機械の横軸電流を制御し、直軸電流の基準値を常に0Aに設定することで、電気トルクを制御します。このアプリケーションノートでは、モデルの主要な機能と外部コントローラとのインターフェースについて説明します。
モデルの説明
このモデルは、主に三相ダイオード整流器、三相インバーター、三相永久磁石同期機 (VBR)で構成されています。
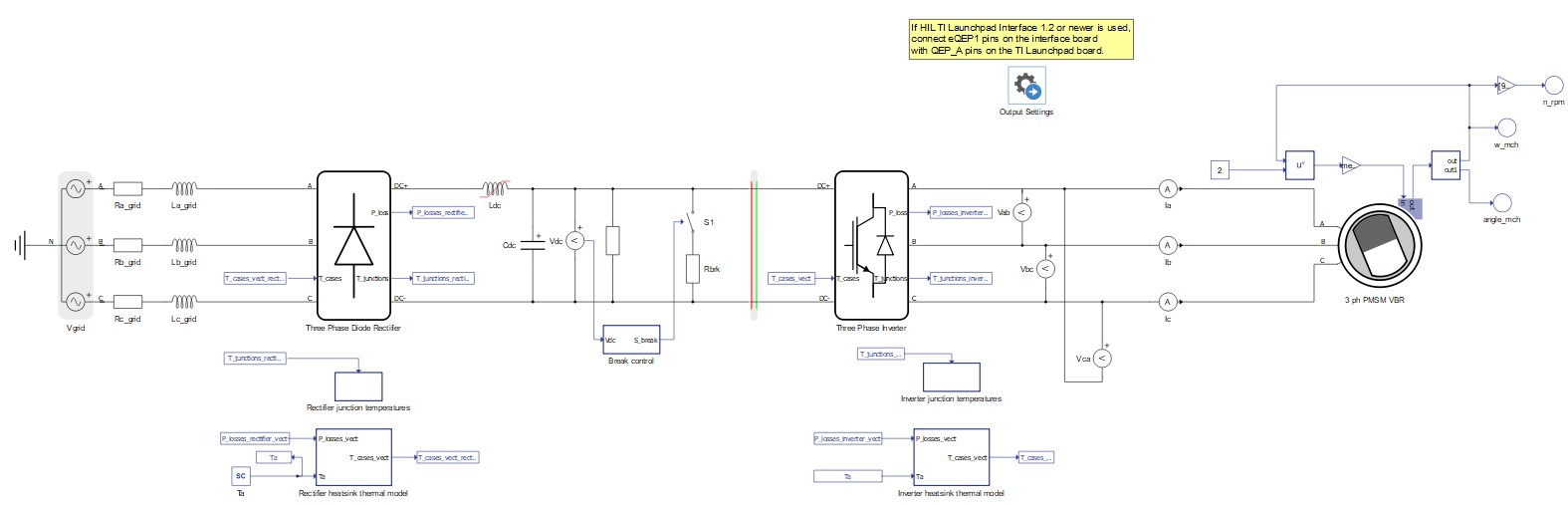
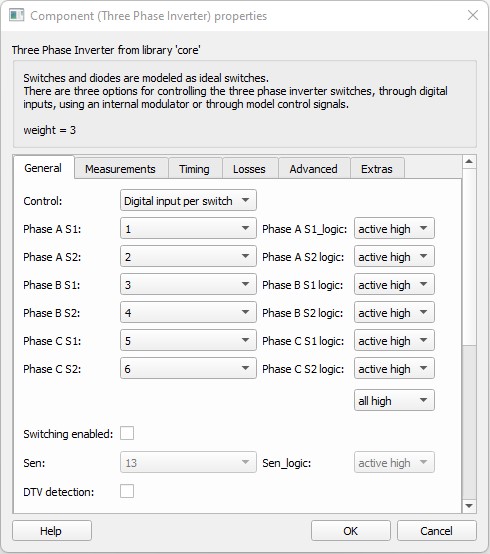
三相ダイオード整流器は、グリッドを表す三相電圧源から供給される交流電圧を整流します。公称グリッド電圧の実効値は180Vです。コンデンサと可変インダクタは、DCリンクの電圧をフィルタリングします。65オームの遮断抵抗器は、マシンが発電機として動作している間、DCリンクから余分な熱エネルギーを一定間隔で放散します。遮断制御ロジックは、遮断制御サブシステム内にモデル化されています。三相インバータは三相PMSMを駆動します。インバータスイッチのゲート駆動信号は、HILデバイスのデジタル入力によって提供されます。これらの信号はTIマイクロコントローラによって生成され、適切なデジタル入力ピンにルーティングされます。
モデル内の両方の電力変換器について、リアルタイムの電力損失と温度計算が実行されます。8極PMSMの定格電力と電圧はそれぞれ19.8kWと400Vです。1回転あたり4096パルスの分解能を持つエンコーダーは、機械の回転速度を計算するためのA、B、Z信号を提供します。これらの信号はデジタル出力ピンを介してコントローラーに送信されます。機械の相電流値は、HILデバイスのアナログ出力を介してシミュレーションから外部コントローラーに提供されます。出力設定コンポーネントは、HILデバイスのアナログおよびデジタル出力ピンを介して外部コントローラーに送信されるすべての信号を1か所に集めます。
機械負荷トルクは次の式で計算されます。
FOCアルゴリズムと変調を含む制御ロジック全体は、TI TMS320F28379Dマイクロコントローラに実装されています。したがって、回路図エディタには制御ステージは実装されていません。
モデルをコンパイルする前に、TMS320F28379Dマイクロコントローラにコードをアップロードする必要があります。そのためには、サンプルモデルに付属する.outファイルと適切なソフトウェアツール(UniFlashなど)が必要です。UniFlashは、TIマイクロコントローラ(MCU)のオンチップフラッシュメモリおよびオンボードフラッシュメモリをプログラムするためのスタンドアロンツールです。無料でご利用いただけます。カードを正常にフラッシュするには、 「TIカードのフラッシュ方法」の手順に従い、シリアルポートウィジェットを使用する必要があります。
シミュレーション
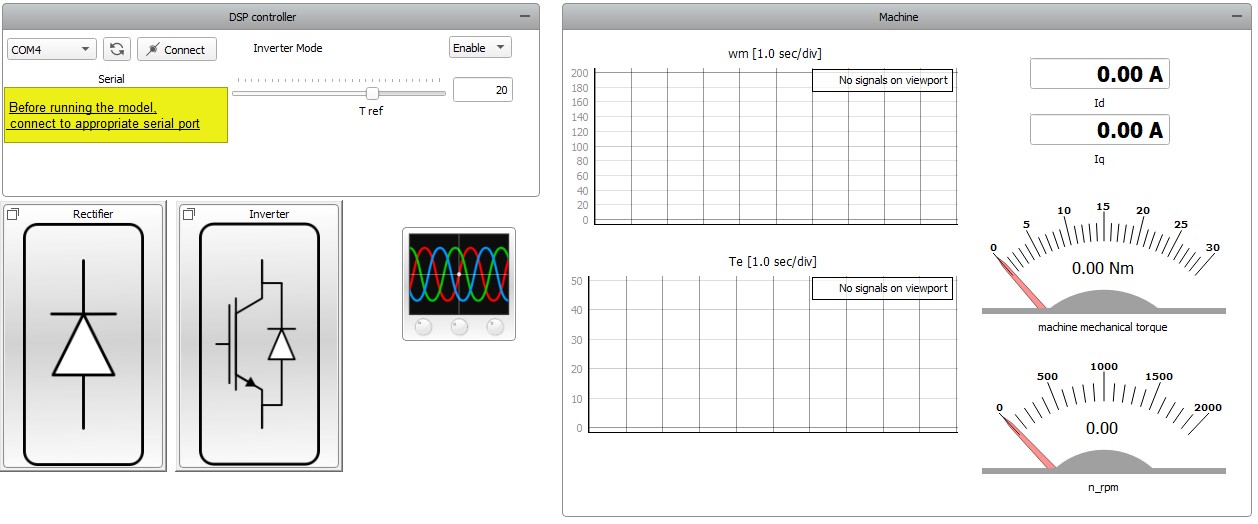
このアプリケーションには、図3に示すような、あらかじめ構築されたSCADAパネルが付属しています。実行時にシミュレーションを監視および操作するための最も重要なユーザーインターフェース要素(ウィジェット)が提供されており、ニーズに合わせてさらにカスタマイズできます。
シミュレーションを開始する前に、次の手順を実行する必要があります。
- HIL TI Launchpadインターフェースボード1.2以降を使用している場合
(ドキュメントを参照)インターフェースボードのeQEP1ピンをTI LaunchpadボードのQEP_Aピンに接続します。接続後、セットアップは次のようになります。 図4HIL TI Launchpadインターフェースボード1.1以前を使用している場合は、 このFAQ.
図4配線レイアウト 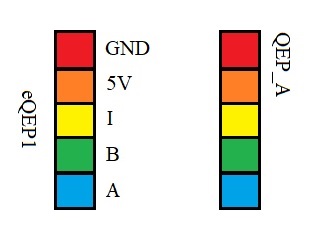
- SCADA パネルで適切な COM ポートを選択し、[接続] ボタンをクリックします。
シミュレーションを操作するには、まず「インバータモード」コンボボックスを「有効」に設定する必要があります。これにより、インバータの動作が有効になります。次に、 T refスライダマクロウィジェットを設定して、機械の基準電気トルクを設定します。この基準トルクと有効コマンドは、シリアルポートウィジェットを介してTI LaunchPadに送信され、TI LaunchPadはHILデバイスのデジタル入力を介してゲート駆動信号をシミュレータに送信します。図5は、設定された基準トルクに従ったモータの挙動を示しています。
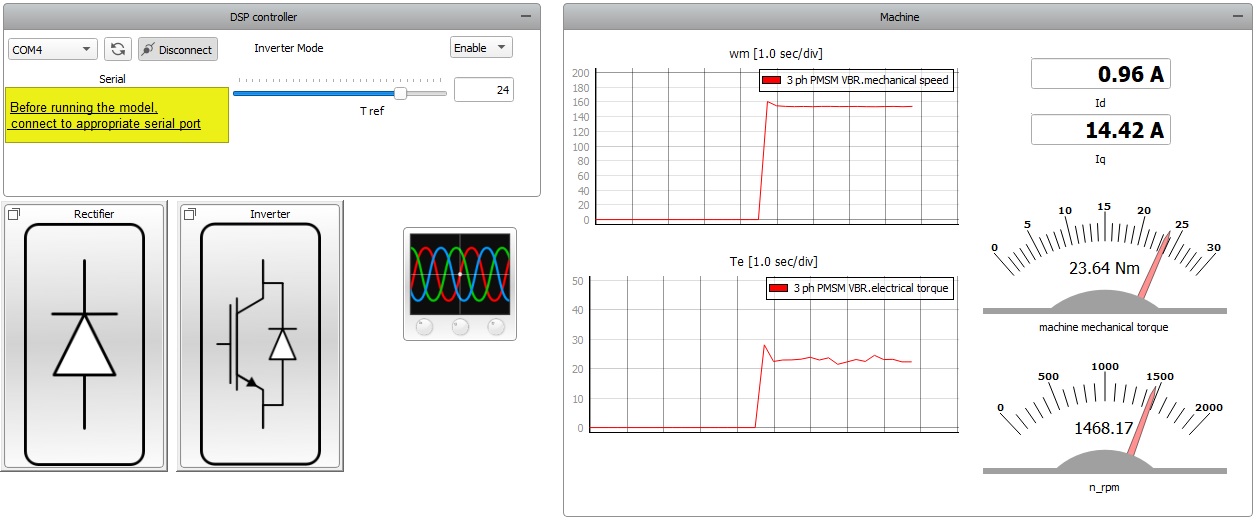
実装されたFOCロジックによれば、直軸電流値は0Aに維持されながら、直交軸電流の参照値はT refスライダー値に応じて変化します。このようなトルク参照値の変化に対する過渡応答は、Capture/Scopeウィジェットを利用することでよりよく観察できます。結果は図6に示されており、 IdおよびIq表示ウィジェットでも観察できます。
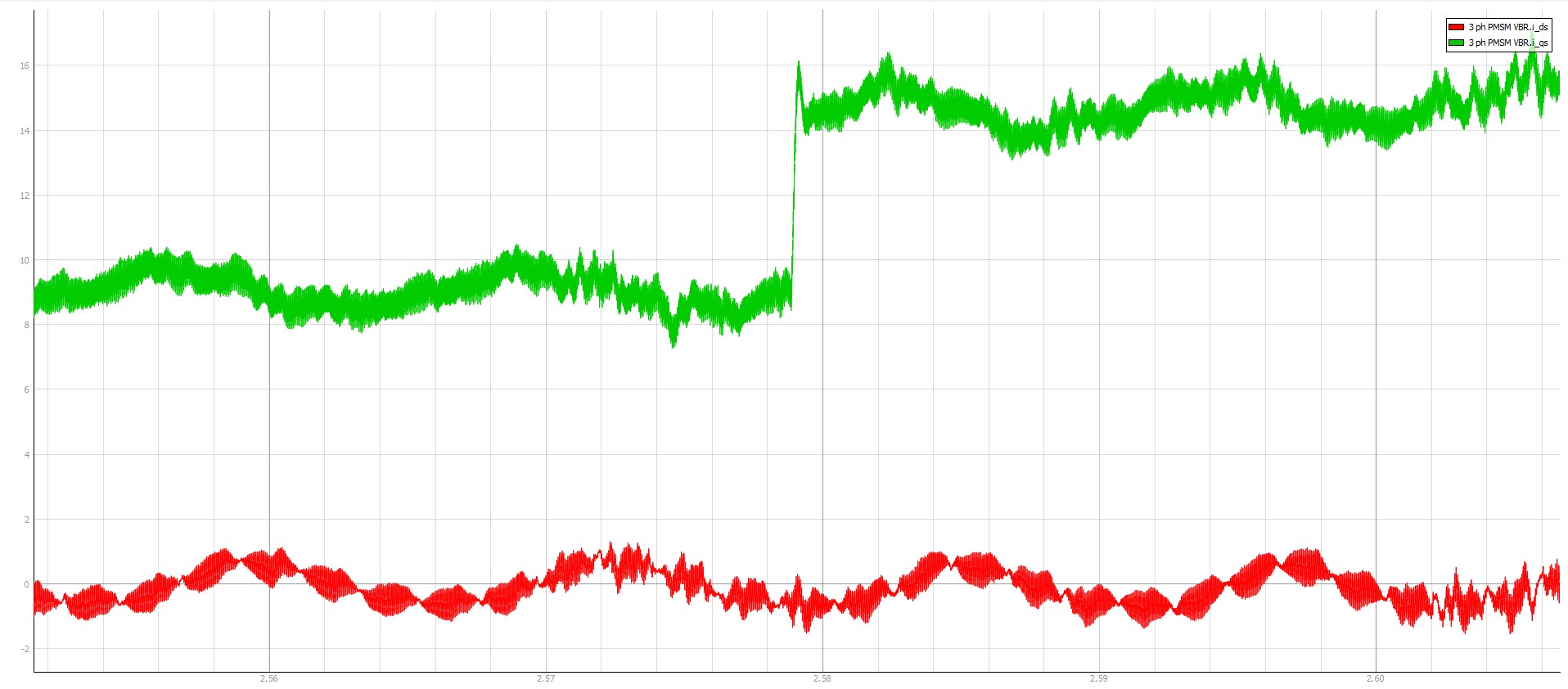
図 7 は、このパワー エレクトロニクス コンバータ内の各ダイオードの電力損失とケース温度および接合部温度を示しています。
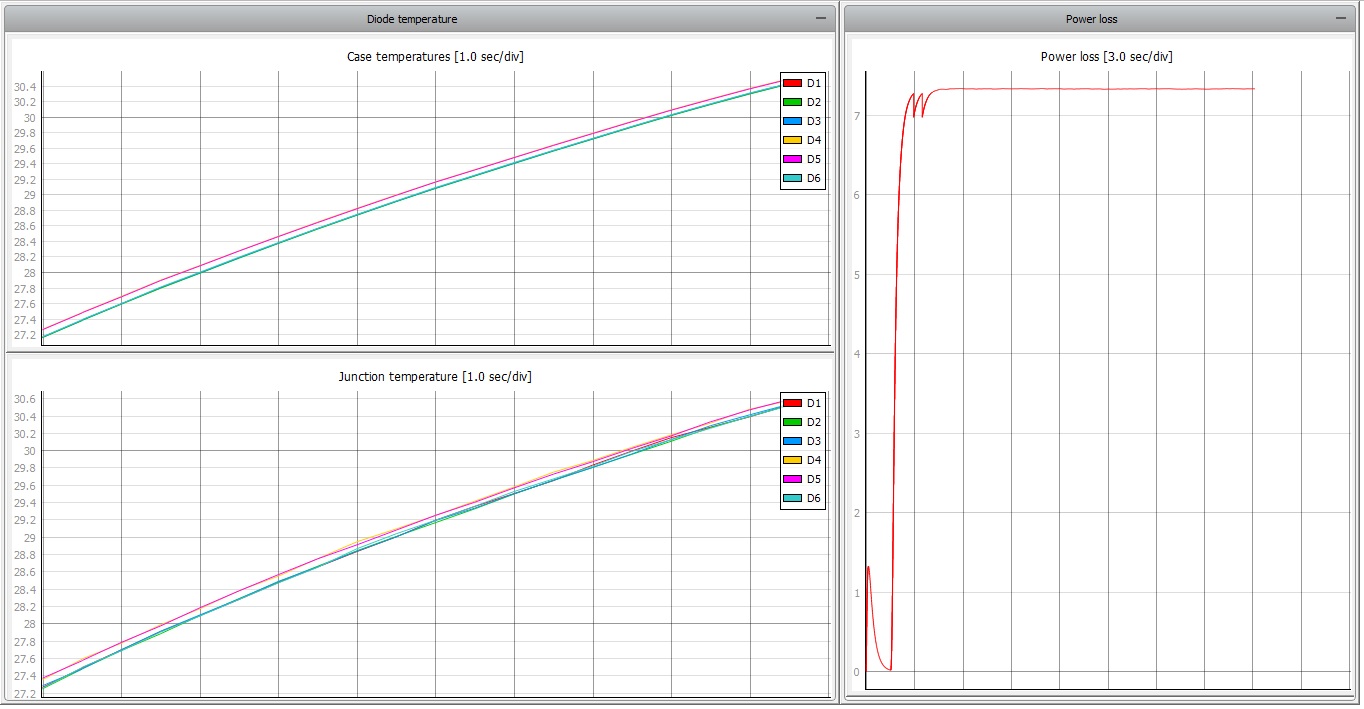
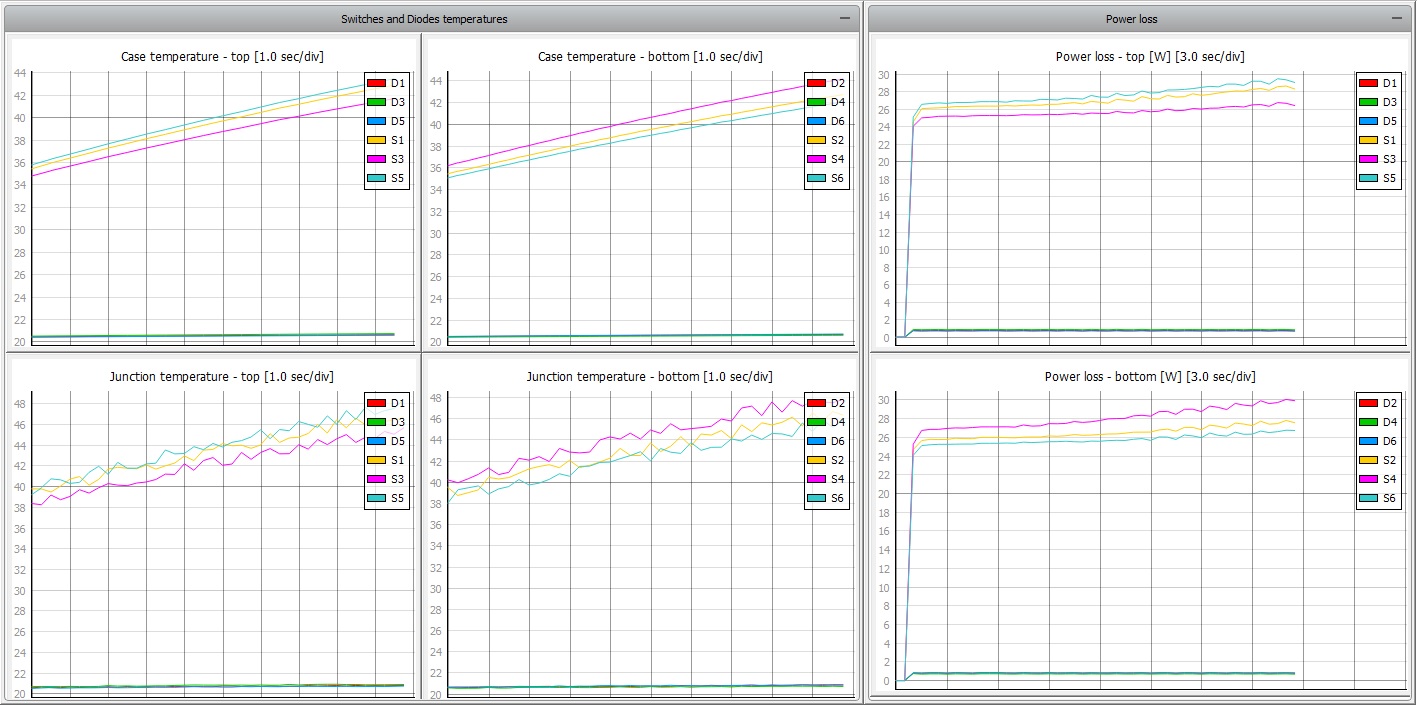
図 8 は、 3 相インバータ内のすべての IGBT とダイオードの電力損失とケース温度および接合部温度を示しています。
テスト自動化
提供されているテストスクリプトは、PMSMのトルクと電流の制御を検証します。テストでは以下のアサーションをチェックします。
- トルクは一定であり、基準値に等しくなります。
- 直軸電流はゼロです。
さらに、パワーエレクトロニクスコンバータ内のすべてのスイッチのケース温度と、コンバータで消費される合計損失も表示します。
トルクおよび電流制御の検証は、8 Nmおよび12 Nmの基準トルク値で実施されます。また、5 Nmおよび15 Nmの基準トルク値における熱応答と電力損失を計算し、グラフに表示します。
インバータの起動コマンドとトルク指令値は、シリアル通信プロトコルを介してホストPCからTIマイクロコントローラに送信されます。これら2つのユニット間のシリアル通信は、PythonのpySerialモジュールを使用して確立されます。
図 9 は生成されたテスト レポートの一部を示しており、8 Nm の基準トルク値に対して取得されたマシンの直軸電流が強調表示されています。
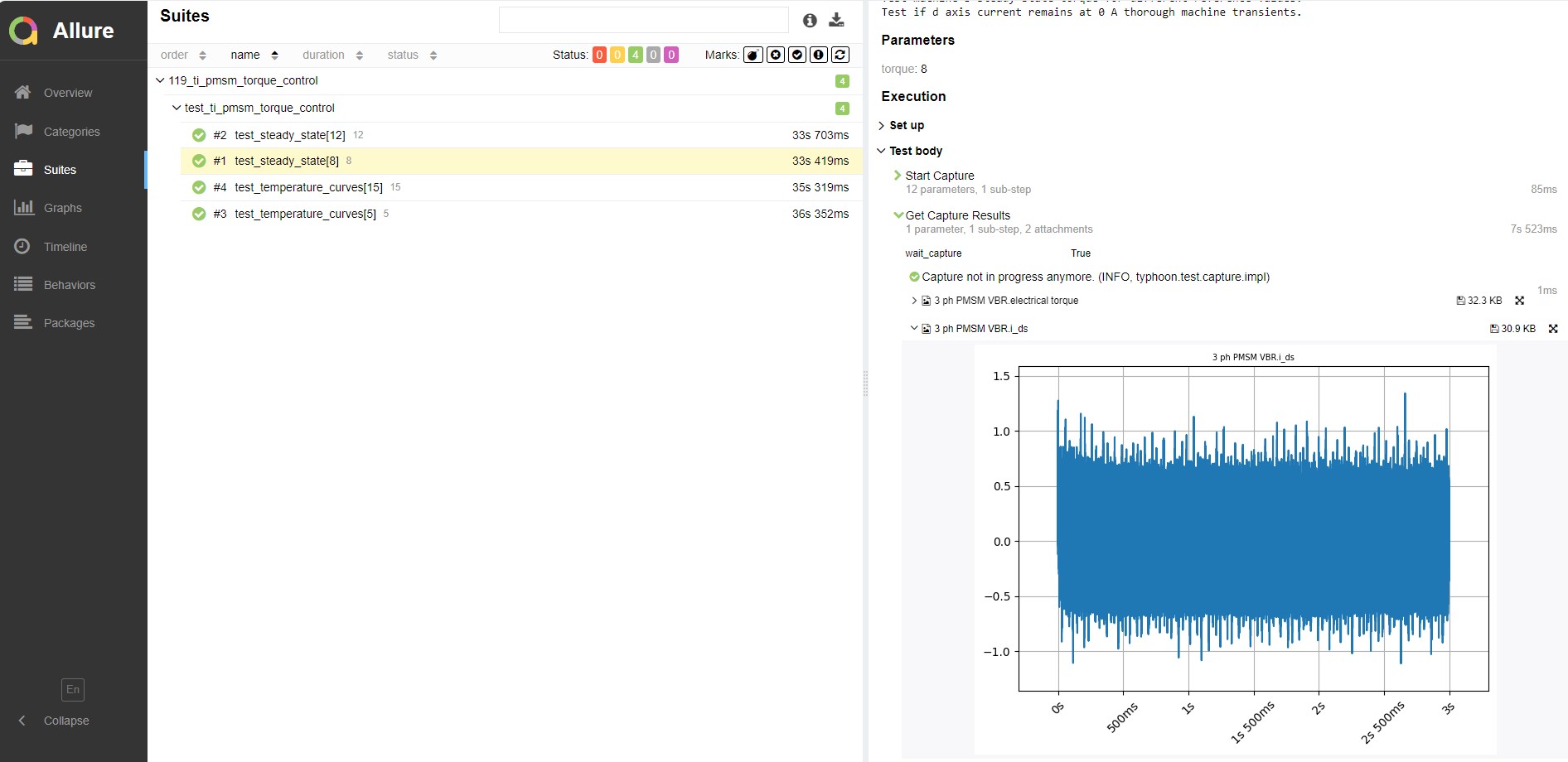
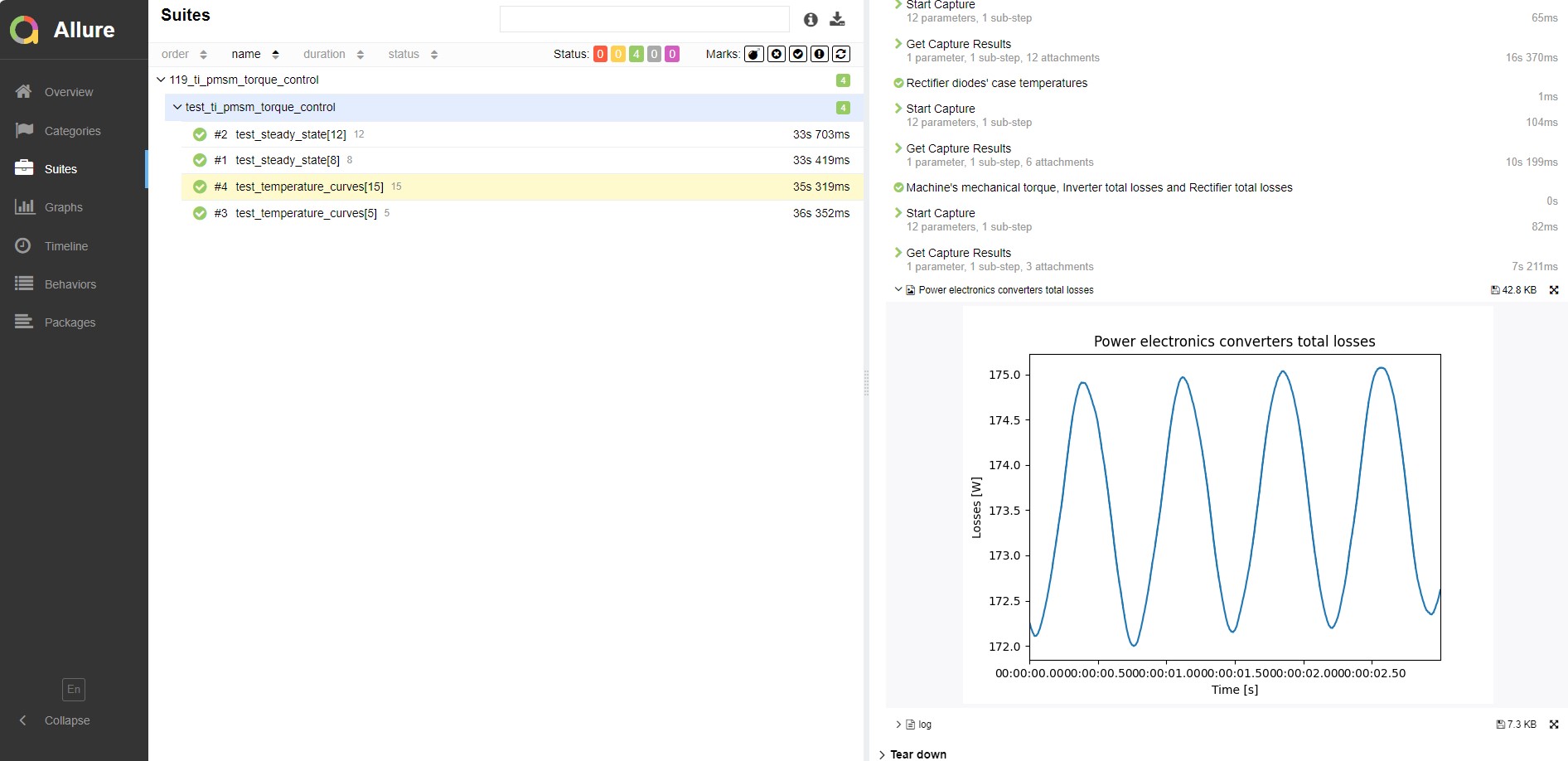
図 10 は、 15 Nm の基準トルク値に対してパワー エレクトロニクス コンバータ内で消費される総損失を示しています。
TyphoonTest IDE からテストを実行すると、完全なテスト レポートを取得できます (簡単にアクセスするには、サンプル エクスプローラーの [テストを開く] ボタンを押します)。
ビデオチュートリアル
この C-HIL セットアップのデモは、こちらでご覧いただけます (インターネット接続が必要です)。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\ハードウェアインザループ\ti pmsmトルク制御 ti pmsmトルク制御.tse ti pmsmトルク制御.cus ti pmsmトルク制御.out 5SNG 0150Q170300_ダイオード.xml 5SNG 0150Q170300_IGBT.xml f28379d.ccxml 生成されたuf設定 例\テスト\119_ti_pmsm_torque_control test_ti_pmsm_torque_control.py |
| 外部ツール | ユニフラッシュ |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL101 |
| デバイス構成 | 1 |
| インタフェース | Texas Instruments LaunchPad XL TMS320F28379D (テスト対象ハードウェア) |
| HILデバイスのリソース利用 | |
| 処理コア数 | 2 |
| 最大マトリックスメモリ使用率 | 47.02% (コア1) 27.34% (コア0) |
| 最大時間枠利用率 | 32.73% (コア1) 35.45% (コア0) |
| シミュレーションステップ、電気 | 10マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
著者
[1] ニコラ・サマージッチ