誘導機付きモジュラーマルチレベルコンバータ(MMC)
MMC の主な用途の 1 つである電気駆動システムでのリアルタイム テストのデモンストレーション。
導入
このアプリケーションノートの主な目的は、Typhoon HIL環境でモジュラー・マルチレベル・コンバータ(MMC)をモデリングする可能性を示すことです。主要な応用分野の一つである電気駆動システムにおけるMMCモデルのパフォーマンスのデモも含まれています。
MMCは、新たに登場したスケーラブルな電力変換トポロジーです。MMCは、高電圧・高出力アプリケーションにおいても、高調波の影響が少ない電圧を生成することを可能にします。MMCの主な利点は以下のとおりです。
- 出力電圧への高調波の影響が低い
- 出力フィルタは不要
- モジュール構成
- 出力電圧などに対するスイッチ定格が低い。
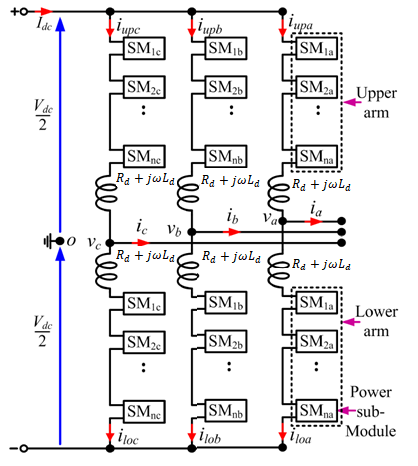
三相MMCの典型的な構造は、 図1コンバータの各相レグには、上側と下側の2つのアームがあります。各アームはn個のサブモジュール(SM)で構成されています。各アームにはインダクタも配置されています。 そして抵抗器 SM のオン/オフ時に発生する上アームと下アームの間の電圧差を補償します。
サブモジュール(SM)の構成を図2に示します。各SMは、2つのIGBTスイッチS1、S2、2つの逆並列ダイオードD1、D2、そしてコンデンサCで構成される単純なチョッパセルです。
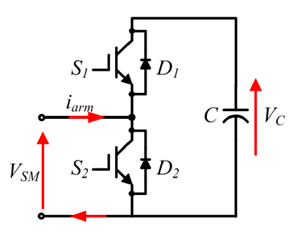
に示すSMを参考に 図2、出力電圧 2つの値を持ちます。 S1がオンでS2がオフの場合、または S1 がオフで S2 がオンの場合。
図 3 はスイッチング機能を使用した MMC 実装を示しています。
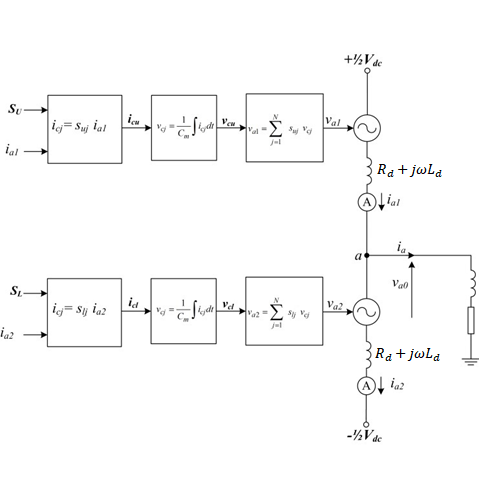
MMCの適切な動作には、各セルコンデンサとスイッチングサブコンポーネント間の平均電圧ストレスを一定に維持する必要がある。 、 どこ はDCリンクの電圧、Nはレベル数です。相「a」の場合、出力相電圧は 上アームセルのコンデンサ電圧と正極対接地電圧、または下アームセルのコンデンサ電圧と負極対接地電圧のいずれかで表すことができます。これらは以下の式で表されます。
任意の各セルコンデンサ(たとえば、相「a」の上アームまたは下アーム)の電圧は、スイッチング関数を使用して表すことができます。
モデルの説明
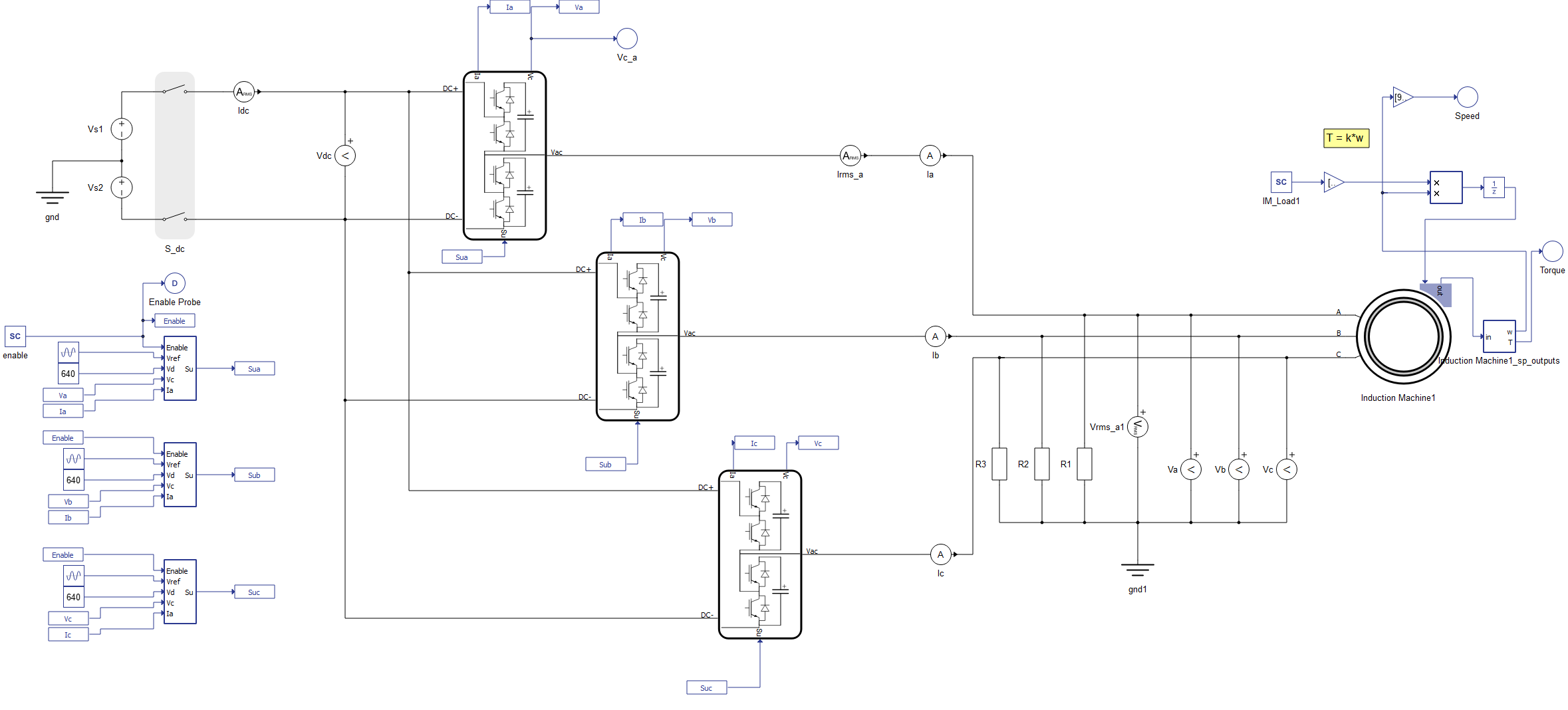
このモデルは、DCリンク、最近傍レベル制御(NLC)を備えた3つのMMCレグスイッチング機能、および誘導機で構成されています。コンバータと機械モデルの制御は、信号処理コンポーネントを使用して実装されています。駆動システムの制御は、組み込みのC関数コンポーネントを使用して開ループとして実装されています。NLCブロックのコンポーネントプロパティでレベル数を変更することができます。
シミュレーション
このアプリケーションには、図5に示すような、あらかじめ構築されたSCADAパネルが付属しています。このパネルには、実行時にシミュレーションを監視および操作するための、最も重要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
このMMCコンバータモデル用に作成されたSCADAパネルでは、様々なウィジェットとスコープを通じて、コンバータの動作を幅広く把握できます。画面右隅では、誘導機の負荷をユニットごとに変更できます。トレースグラフでは、機械的トルクと電気的トルクを確認できます。
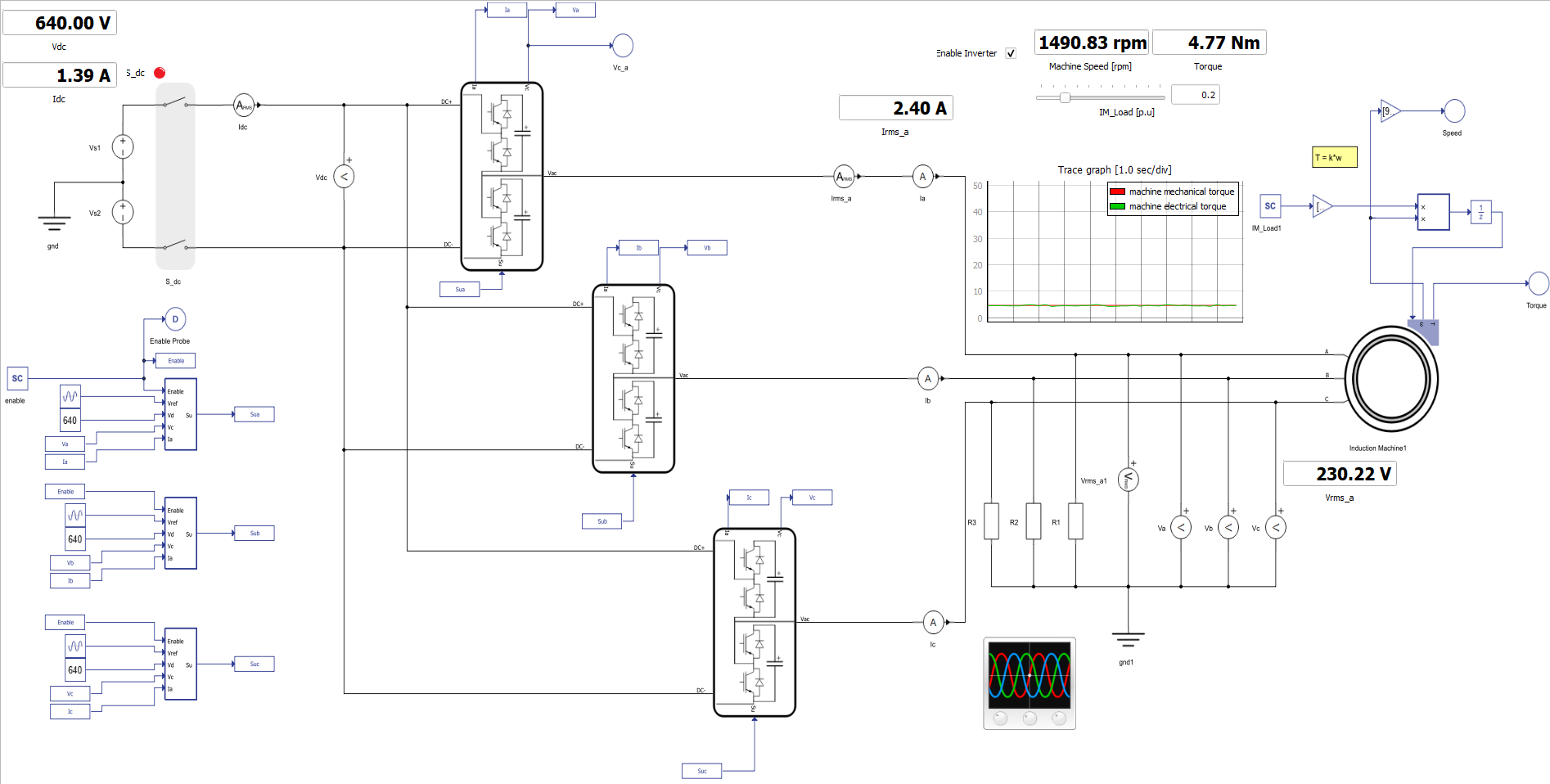
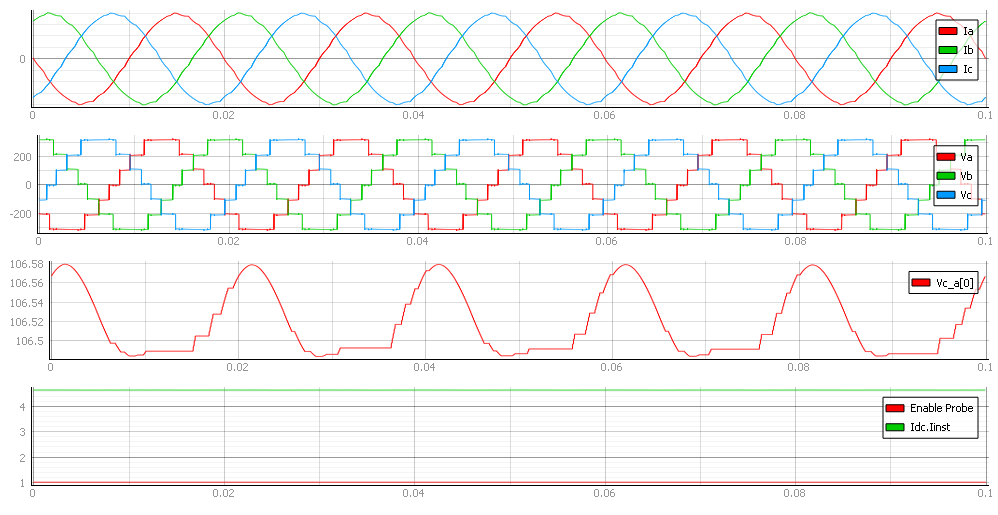
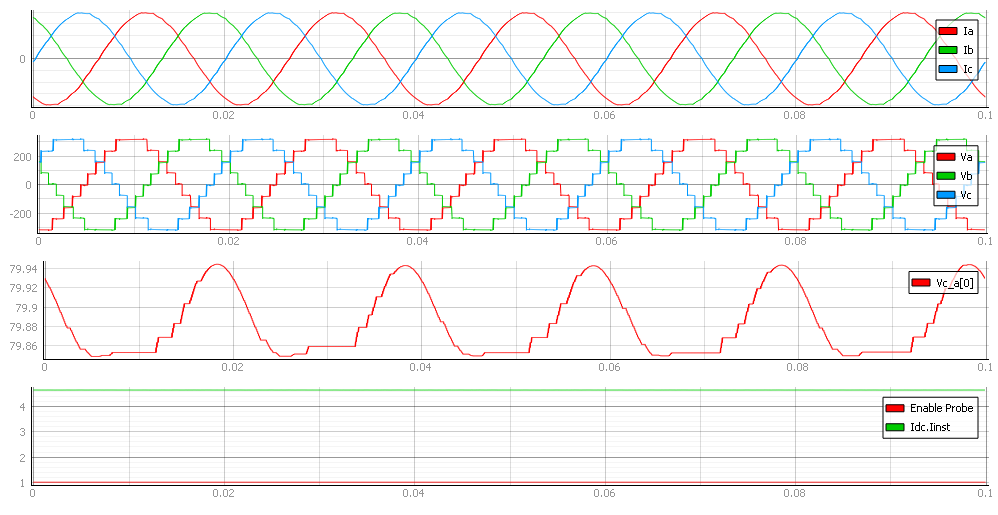
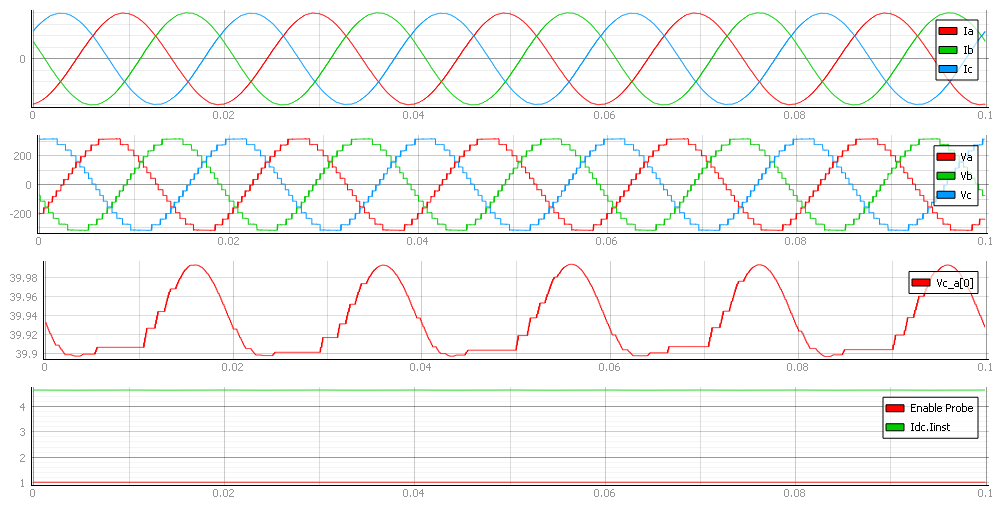
Captureでは、三相電流と三相電圧を全て確認できます。3つ目のビューポートにはコンデンサ電圧と、コントローラがこれらの電圧をコンデンサ間でどのようにバランスさせるかが表示されます。次の3つの図は、異なる電圧レベルにおけるコンバータの異なる動作を示しています。電圧レベルの最大数は、モデルのサイズと各HILデバイスの信号処理能力によって異なります。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\電気駆動装置\indm付きmmc mmc と indm.tse mmc と indm.cus |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL402 |
| デバイス構成 | 1 |
| HILデバイスのリソース利用 | |
| 処理コア数 | 1 |
| 最大マトリックスメモリ使用率 | 1.9% |
| 最大時間枠利用率 | 40.2% |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | 100マイクロ秒 |
参考文献
[1] Prafullachandra M. Meshram、Vijay B. Borghate、「モジュラーマルチレベルコンバータ(MMC)のための簡素化された最近傍レベル制御(NLC)電圧バランス方法」DOI 10.1109/TPEL.2014.2317705、IEEE Transactions on Power Electronics
著者
[1] シミサ・シミッチ