周波数応答ウィジェットの使い方
HIL SCADAの周波数応答ウィジェットの使い方のデモンストレーション
導入
HIL SCADAの周波数応答ウィジェットは、毎回新しいシミュレーションを開始することなく、コントローラを調整し、システムの小信号性能をオンザフライで測定する方法を提供します。これは、モデルの時間領域解析を補完するために使用できます。
モデルの説明
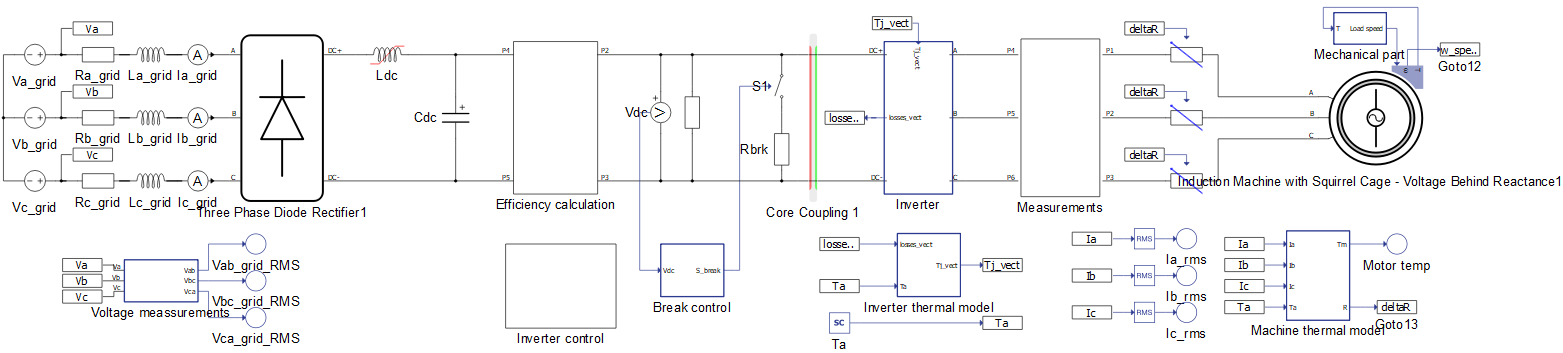
この例は、誘導機の速度制御の例の1つに基づいています。このウィジェットを使用してループゲインと感度伝達関数を測定することで、制御性能を調整および向上させる方法の一例を示します。モデルを図1に示します。
周波数応答のためのスピードコントローラの修正
図 2の簡単な制御システムの図は、この例に関連するシステム伝達関数の一部を定義します。
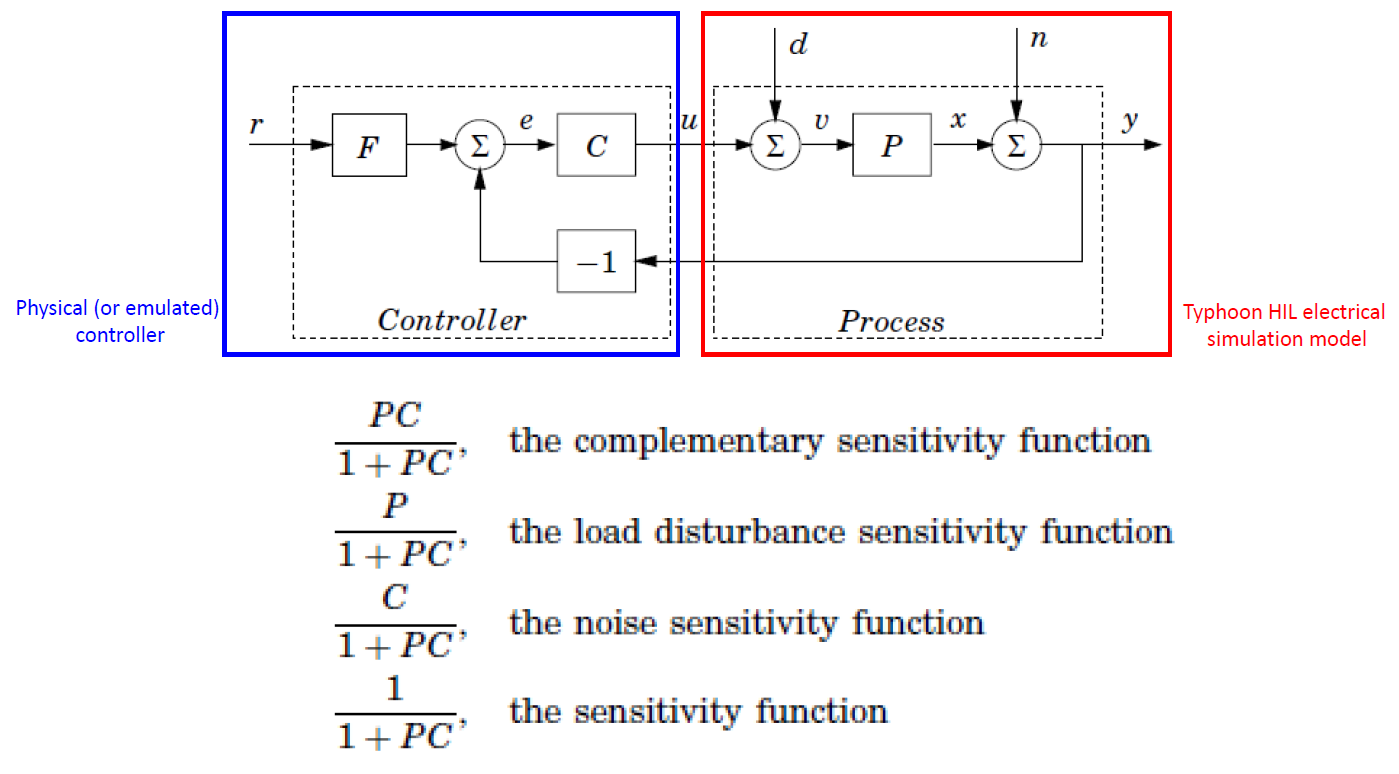
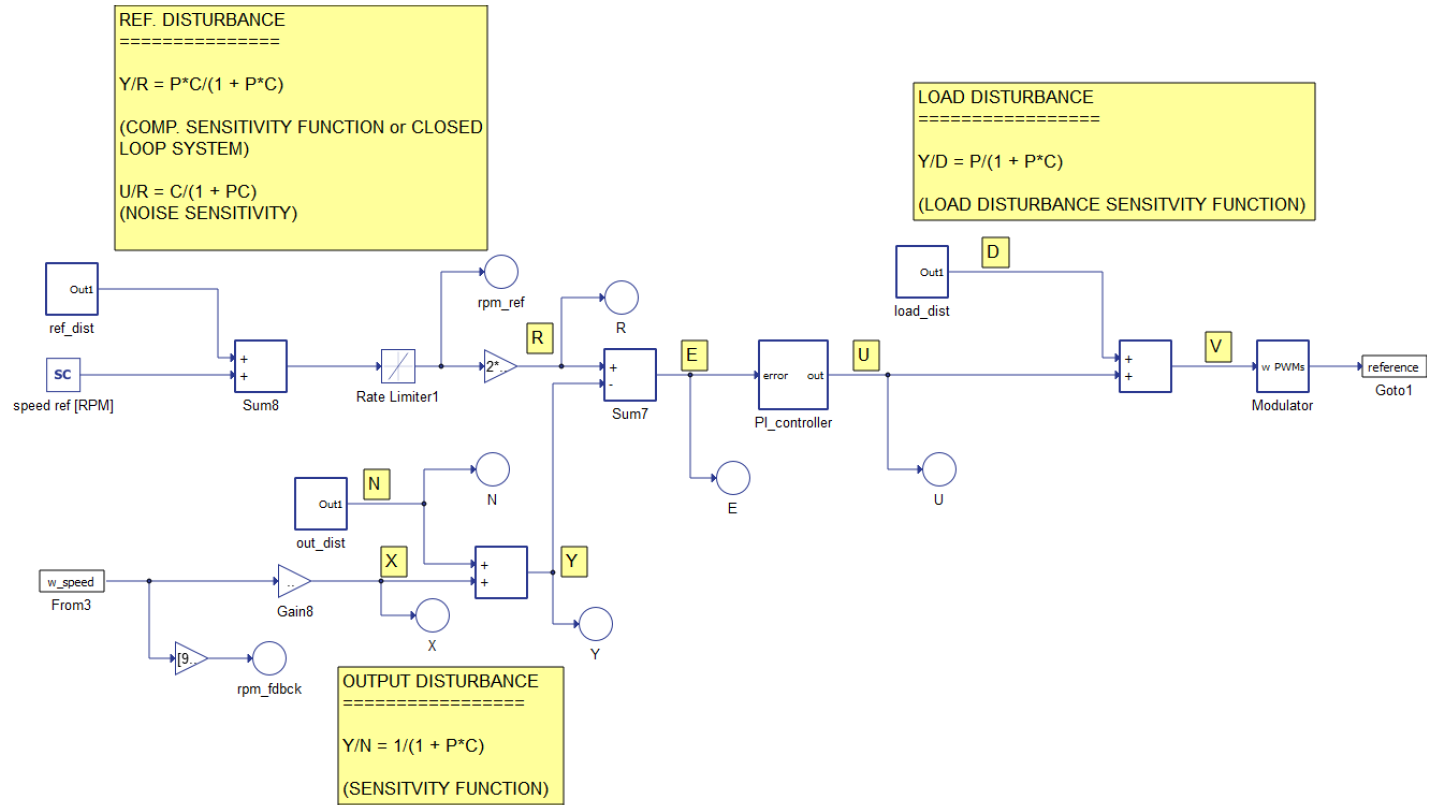
外乱といくつかの測定信号を含めた後、変更された制御システムは図 3に示され、基準外乱、負荷外乱、および出力外乱の入力を示しています。
シミュレーション
モデルをコンパイルし、カスタムSCADAインターフェースをロードすると、周波数応答ウィジェットが表示されます。ウィジェットをダブルクリックすると、周波数応答の設定が表示されます(図4 )。
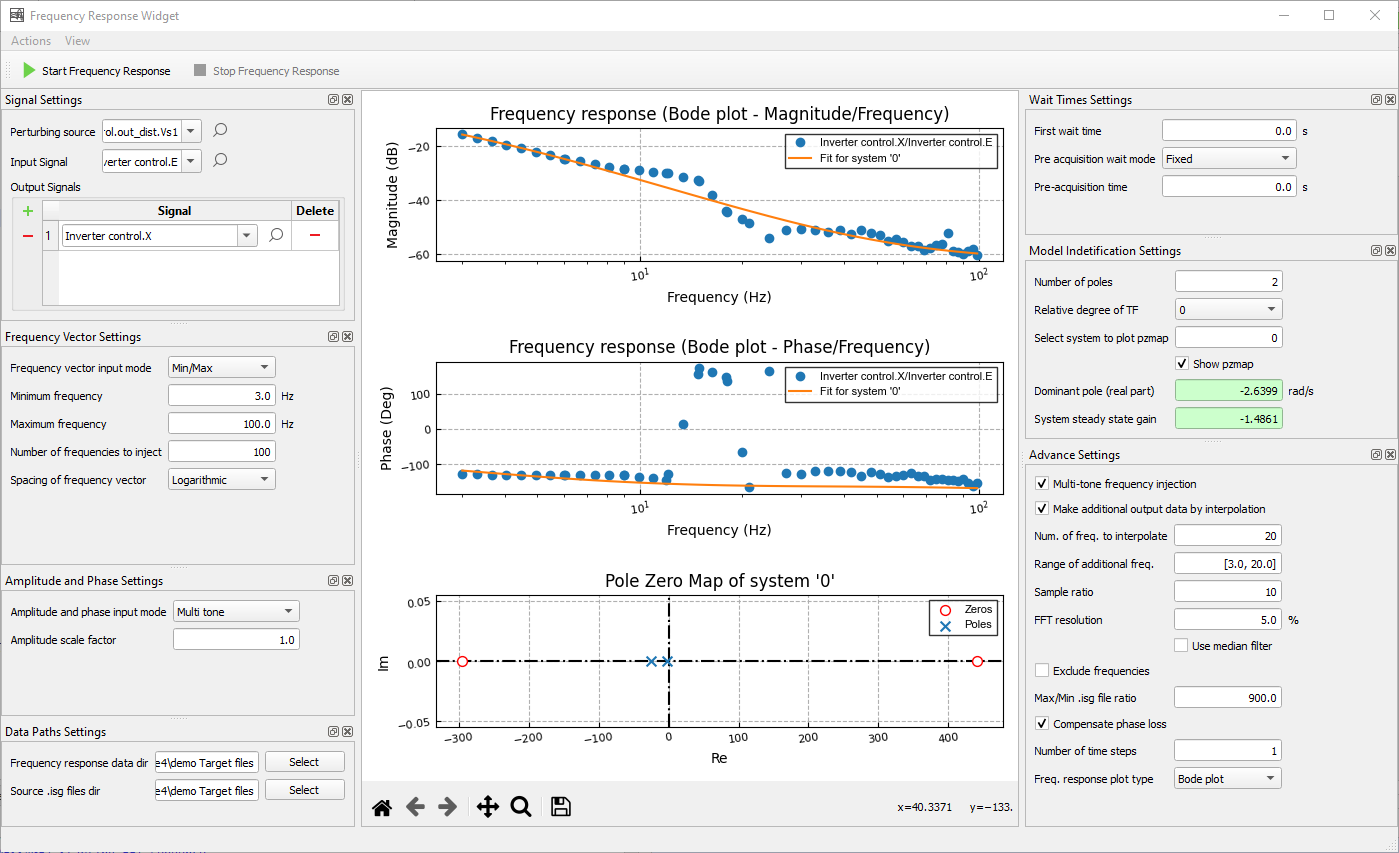
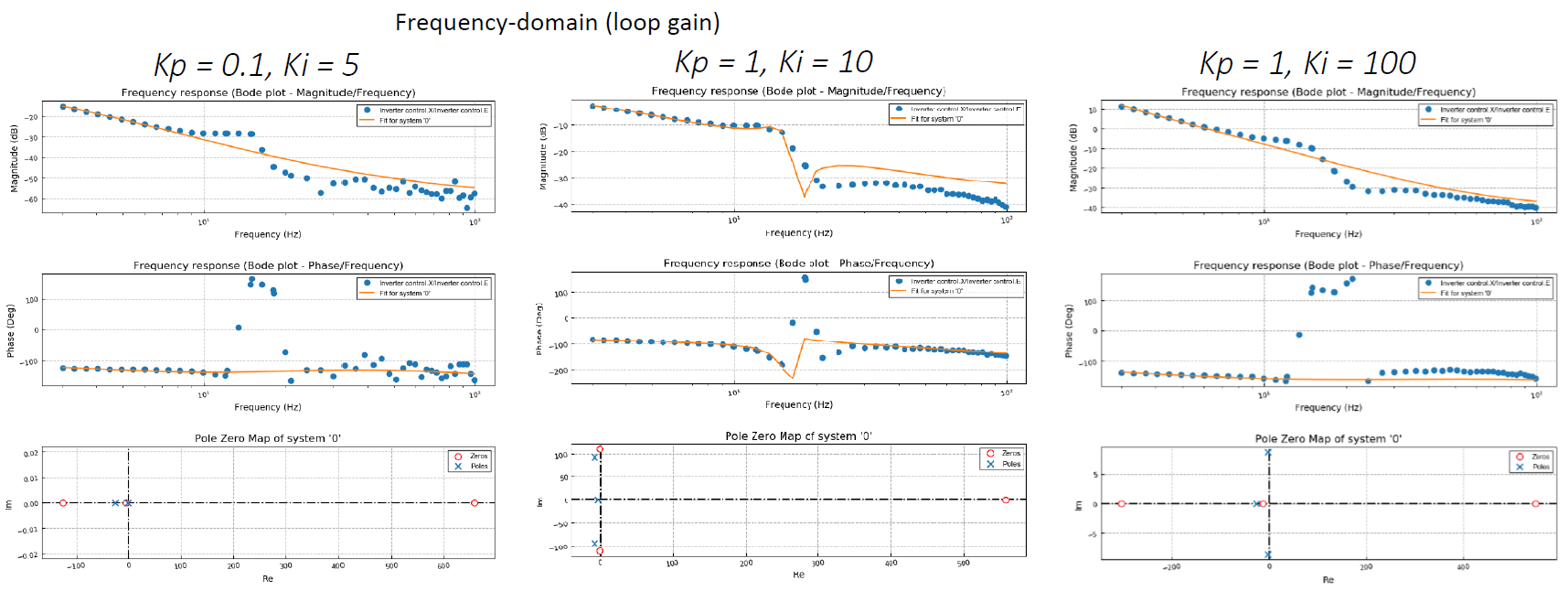
高い開ループゲインを確保することは、システムのクローズドループ性能を向上させるためによく用いられる方法です。この例では、ループゲインは「X/E」で表される伝達関数の負の値です。ループゲインを測定するには、摂動源を「インバータ制御.out_dist.Vs1」、入力信号を「インバータ制御.E」、出力を「インバータ制御.X」に設定します。図5は、KpとKiの3つの異なる組み合わせにおける負のループゲインを示しています。一般的に、ループゲインが高いほど応答速度は速くなりますが、安定性の余裕度(振動の増加)が減少します。
感度伝達関数はループゲインを補完します。感度周波数応答を得るには、入力を「N」、出力を「Y」に選択します。一般的に、性能と感度のバランスをとるために、感度ピークは1.0 dB~2.1 dBの範囲にする必要があります。また、閉ループシステムがゆっくりと移動する参照信号を正しく追跡できるように、低周波数域では感度が低いことが理想的です。
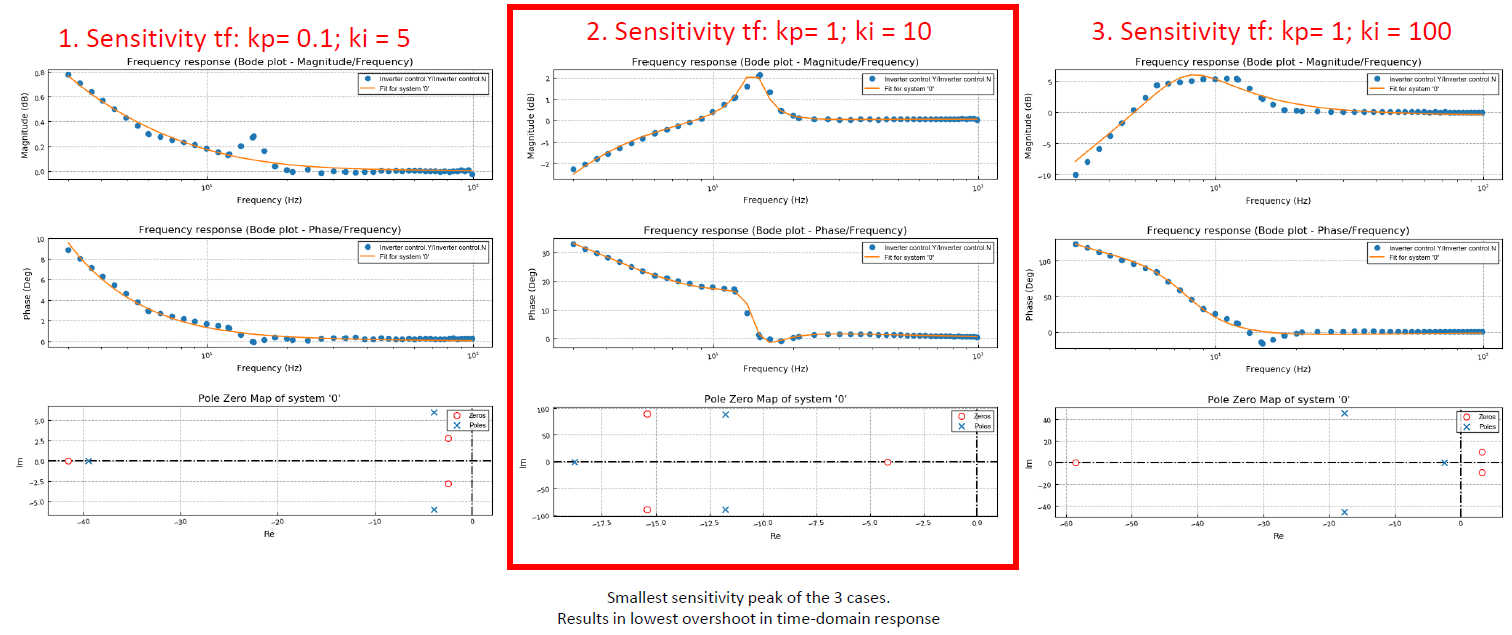
感度分析に基づくと、Kp = 1およびKi = 10は、15 Hz付近で約2.1 dBのピーク値を示し、十分な性能を示しています。この結果は時間領域分析によって確認できます。図7に示すように、異なるKpおよびKiパラメータでのステップ応答を用いて、Kp = 1およびKi = 10が、周波数応答から予測される応答速度と減衰率の最適なバランスを実現していることを確認できます。

著者
[1] シミサ・シミッチ