電気モデルと熱モデルを結合する方法
Typhoon HIL Schematic Editor で電気モデルと熱モデルを結合する方法を説明します。
導入
熱効果は電気機器設計において重要な役割を果たします。ハードウェア設計者や制御エンジニアは、独立して動作する熱モデルの出力だけでなく、電気モデルとの連携によって熱効果を設計に組み込むことも重要です。このアプリケーションノートでは、可変速駆動モデルにおける電気と熱の連成を実現するための2つのソリューションを紹介します。Typhoon HILシステムアーキテクチャは、電気モデルと熱モデルを、それぞれのモデルの複雑さに関わらず、リアルタイムで並行してシミュレーションすることを可能にします。
モデルの説明
可変速駆動装置の電気モデルは、ダイオード整流器、DCリンク、ブレーキチョッパ、およびインバータで構成されています。誘導電動機からの機械的負荷はモデルベースで、機械部品サブシステムに実装されています。誘導電動機は「リアクタンスの後ろの電圧」としてモデル化されており、これにより数値安定性が向上します。
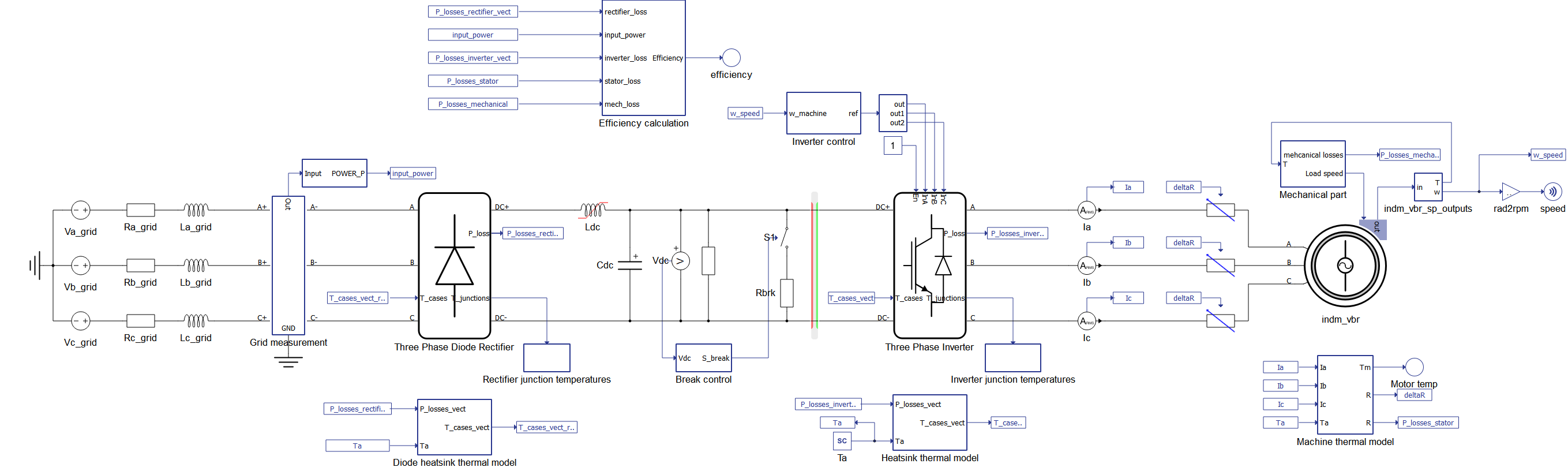
熱モデルは、インバータ(ヒートシンク)熱モデル、整流器(ヒートシンク)熱モデル(図2 )、および機械熱モデル(図4 )で構成されています。リアルタイムシミュレーションの文脈では、熱プロセスは「低速」プロセスとして分類されます。したがって、すべての熱モデルは、熱ネットワークコンポーネントを介して信号処理要素を使用して実装されます。整流器とインバータのヒートシンクモデルの熱ネットワークはCauer熱モデルに基づいていますが、インバータと整流器の熱モデルはFoster熱モデルに基づいています。機械熱モデルはCauerモデルに基づいています。

周囲温度 (Ta) は両方のモデルの入力であり、シミュレーションに示されているように、インバーターとモーターの両方のパフォーマンスに重要な役割を果たします。
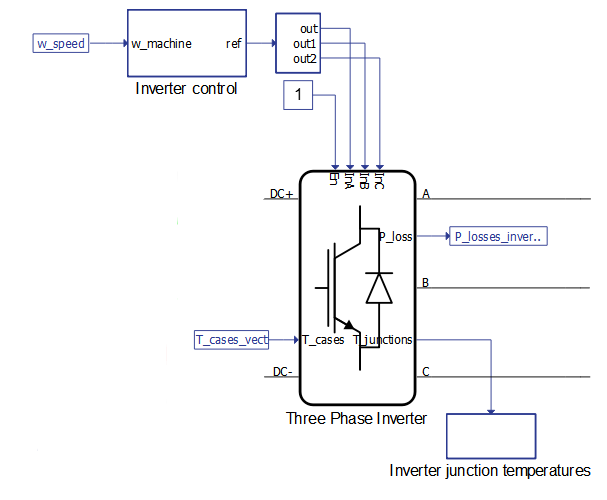
インバータまたは整流器とそれぞれの熱モデル間の電気-熱結合には、コンバータのプロパティで損失計算を有効にする必要があります。これにより、図3に示すように、インバータまたは整流器コンポーネントに1つの追加入力(ケース温度)と2つの出力(電力損失と接合部温度)が有効になります。損失計算のパラメータは、インバータの場合はXMLファイルから自動的にインポートされますが、整流器の場合は手動でインポートします(手動インポートに関するビデオチュートリアルはこちらのリンクからご覧いただけます) 。電力損失ベクトルP_lossesはヒートシンクの熱モデルに入力され、ドライブ効率計算に組み込まれます。
機械熱モデルの根底にある考え方は、温度がステータ抵抗に及ぼす影響を明らかにし、機械のステータ損失を計算することです。このモデルは、ステータ電流と周囲温度を入力し、モータ温度とステータ抵抗の変化(デルタR)を出力します。電気と熱の結合は、ステータ端子にデルタRによって直接制御される可変抵抗器(時変素子(TVE)とも呼ばれる)を使用することで実現されます(図4 )。
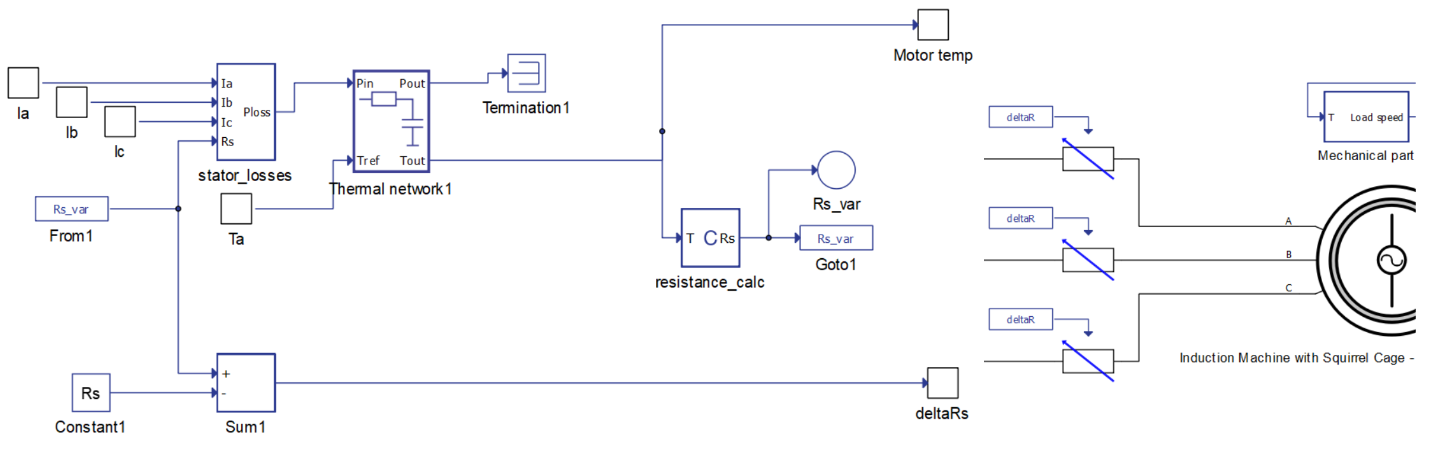
各ステータ相には3つの可変抵抗器があるため、コンパイラコンソールには、TVEが配置されているプロセッシングコアについて「TVEソルバー使用率:16個中3個」と表示されます。このモデルで使用されているその他の主要リソースは、サンプル要件に記載されています。
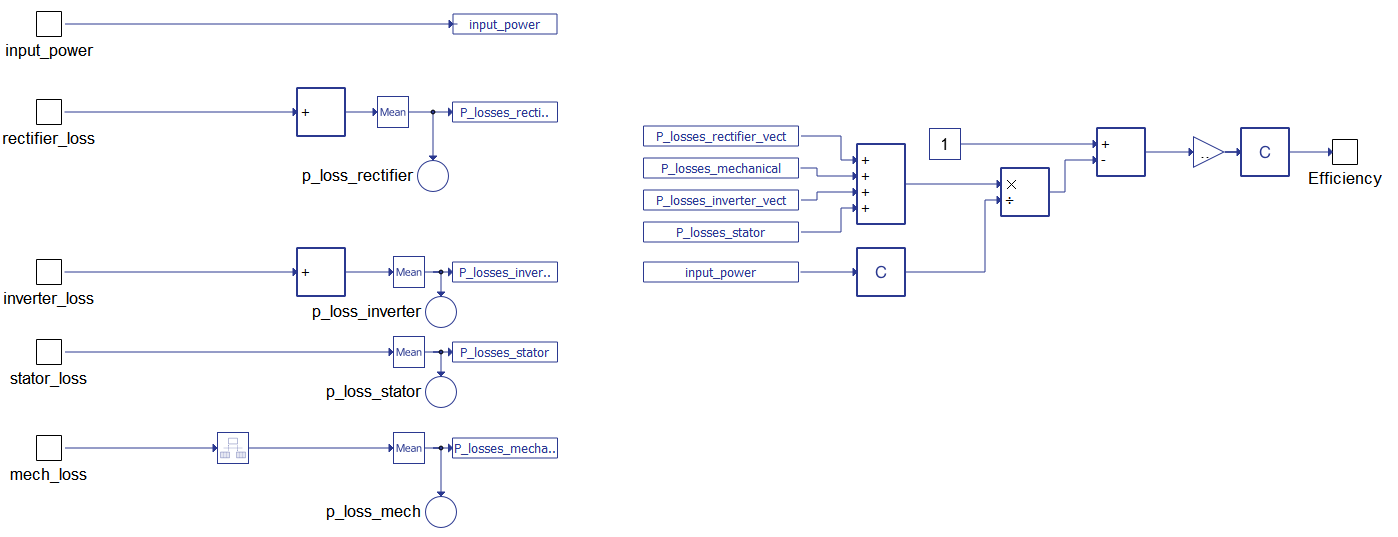
このモデルには、駆動システム全体の効率を計算するアルゴリズムも含まれています。入力電力、整流器での電力損失、インバータでの電力損失、機械の固定子での電力損失、そして機械損失を考慮します。これらの入力に基づいて、アルゴリズムは駆動システム全体の効率を出力します。
シミュレーション
このアプリケーションには、あらかじめ構築されたSCADAパネル(図6 )が付属しています。このパネルには、実行時にシミュレーションを監視および操作するための主要なユーザーインターフェース要素(ウィジェット)が用意されています。ニーズに合わせて自由にカスタマイズできます。
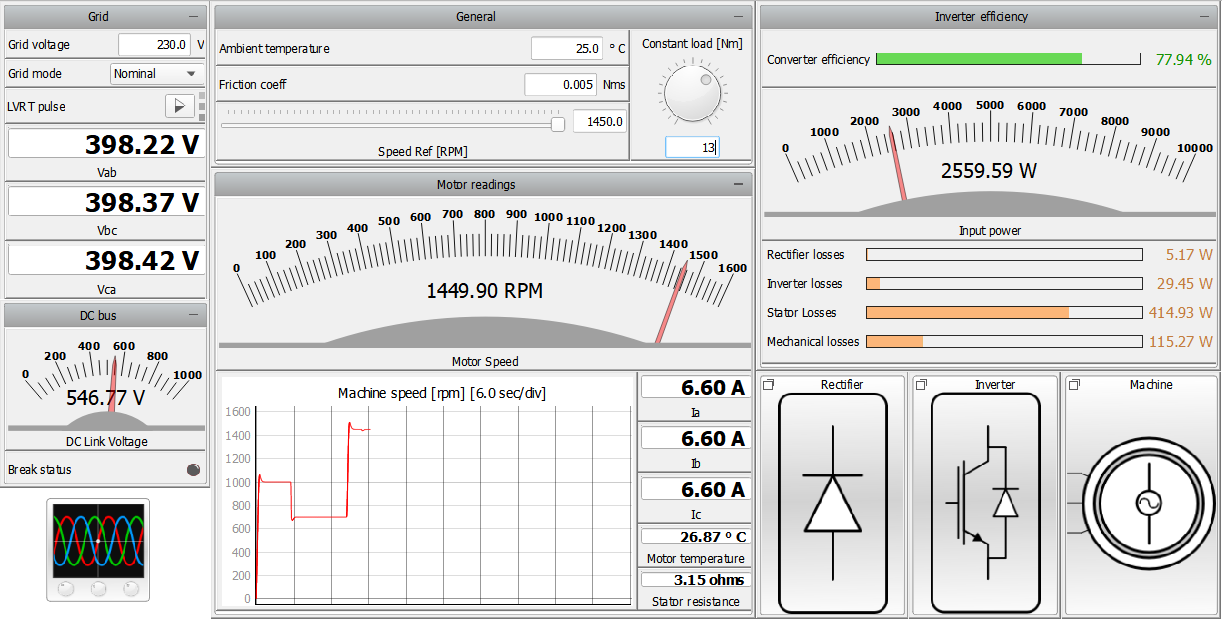
シミュレーション開始時のデフォルトの動作周囲温度は25℃です。シミュレーション中は複数の速度指令値が提供され、これがドライブの損失と全体的な効率に影響を与えます。これは図6の右側に示されています。
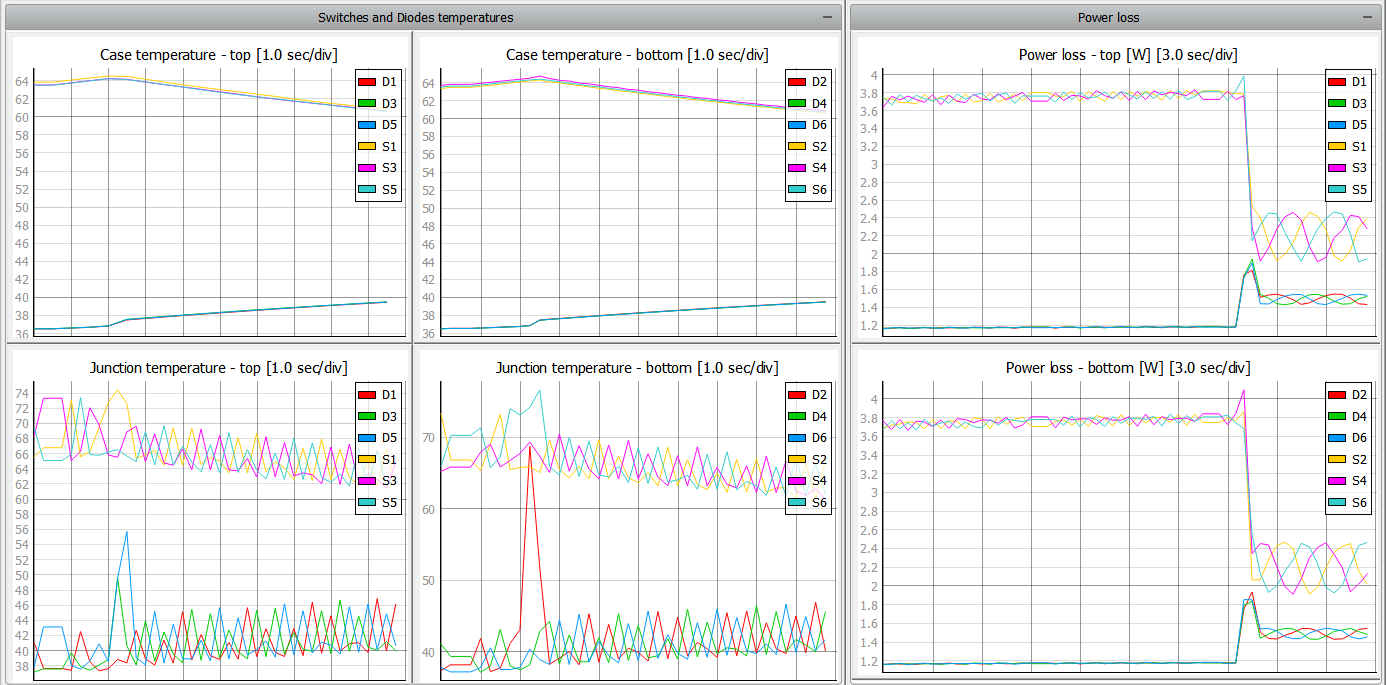
ダイオード、スイッチ、ジャンクション温度、あるいは電力損失の傾向を観察したい場合は、図6の右下に示す専用のサブパネルを開いてください。さらに、「マシン」サブパネルでは、機械損失、モーター温度、ステーター抵抗の傾向を観察できます。
例えば、図7をご覧ください。これは動作中の温度傾向と電力損失を示しています。ある時点で速度指令とトルクが低下し、ケースとジャンクションの温度と電力損失、そしてそれらにおける電力損失にも影響を与えています。この高い温度分解能は、ストリーミング信号を使用しているため実現されていることに注意してください。
テスト自動化
この例のテスト自動化はまだありません。ご協力いただける場合はお知らせください。アプリケーションノートへの署名を喜んで承ります。
要件の例
表1は、モデルをリアルタイムで実行するためのファイルの場所とハードウェア要件に関する詳細情報と、この最小限のハードウェア構成でモデルを実行した場合のHILデバイスのリソース使用率を示しています。この情報は、モデルの実行とカスタマイズを必要に応じて行う際に役立ちます。
| ファイル | |
|---|---|
| Typhoon HILファイル | 例\モデル\電気駆動\indm損失計算と熱モデル indm損失計算と熱モデル.tse indm損失計算と熱モデル.cus IGP15N60T_ダイオード.xml IGP15N60T_IGBT.xml |
| 最小ハードウェア要件 | |
| HILデバイス数 | 1 |
| HILデバイスモデル | HIL402 |
| デバイス構成 | 4* |
| HILデバイスのリソース利用 | |
| 処理コア数 | 1 |
| 最大マトリックスメモリ使用率 | 59.18% |
| 最大時間枠利用率 | 60.62% |
| シミュレーションステップ、電気 | 1マイクロ秒 |
| 実行率、信号処理 | マルチレート(100 µs、200 µs) |
*このモデルは可変抵抗器を使用します。「時間変動要素」をサポートするHILデバイス構成を選択してください。デフォルトでは、可変抵抗器と機械ソルバーの両方に対応するため、構成4のHIL402が選択されています。
著者
[1] オグニェン・ガグリカ