システムアーキテクチャの基礎
このセクションでは、Typhoon HIL システムの基本要素とその機能 (FPGA ソルバー、ユーザー CPU、システム CPU、通信 CPU、ハウスキーピング CPU) について説明します。
リアルタイムのみ:このドキュメントは、リアルタイム/VHIL シミュレーションにのみ有効です。
Typhoon HIL シミュレータは、図 1に示す異種マルチプロセッサ アーキテクチャに基づいています。
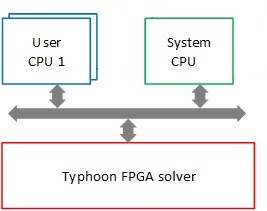
システムの基本要素とその機能は次のとおりです。
- Typhoon FPGAソルバー– 電気ドメインモデルの時間厳守シミュレーションに最適化された、独自のFPGAベースの専用マルチコアプロセッサです。Typhoon FPGAソルバーは、基本シミュレーションステップでモデルを実行します。
- ユーザーCPU – ユーザーが直接制御する1つ以上の汎用プロセッサ。信号処理コンポーネントで構成されるサブモデルを実行します。シミュレーションステップはユーザーが定義します。
- システムCPU – ユーザーが直接制御する汎用プロセッサ。通常、特定の電気ドメインコンポーネントの低ダイナミクス現象のシミュレーションに使用されます。システムCPUを利用するコンポーネントの例としては、 RMS測定や定電力負荷/電源などが挙げられます。
- 通信 CPU – CAN バス、CAN FD、イーサネット変数交換、IEC 61850 サンプル値プロトコル、SPI プロトコルなどの時間重視の通信プロトコルのアプリケーションを実行する 1 つ以上の汎用プロセッサ。
-
ハウスキーピング CPU – Linux ベースの OS を実行し、次の処理を担当する 1 つの汎用プロセッサ。
- HIL起動シーケンス
- PCとの通信
- 時間的に重要でない通信プロトコル
図 2 は、特定のモデルのさまざまな要素が HIL デバイスの処理リソースにどのようにマッピングされるかを示しています。
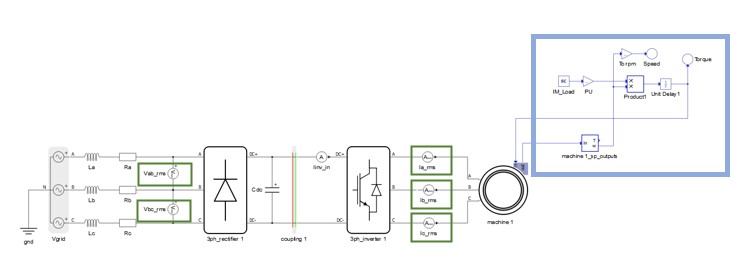
- 緑の四角で囲まれたコンポーネントは、システム CPU 上で完全にまたは部分的にシミュレートされます。
- 青い四角で囲まれたコンポーネントは、ユーザー CPU でシミュレートされます。
- 残りのすべての要素は Typhoon FPGA ソルバーでシミュレートされます。
電気ドメイン モデリングの原則については、「電気ドメイン モデリングの原則と制約」で説明されています。
信号処理モデリングの詳細については、「信号処理モデリングの原理」を参照してください。