GDSオーバーサンプリング
リアルタイム/VHIL シミュレーションにおける GDS オーバーサンプリングの定義と概要、およびシミュレーション タイムステップごとにデジタル入力を複数回サンプリングする必要がある場合にどのように使用するかについて説明します。
リアルタイム/VHILシミュレーションにおけるGDSオーバーサンプリング
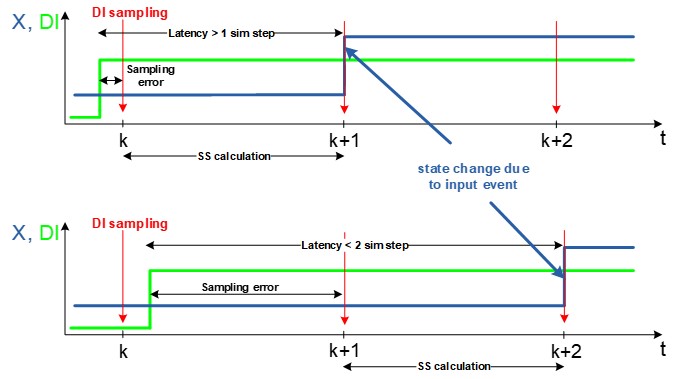
GDS(ゲート駆動信号)は、コンバータを制御するために使用されるデジタル入力です。GDSオーバーサンプリングが必要な理由と、デジタル信号(GDS)を観測できる最大周波数について説明するために、まず実効分解能という用語を定義しましょう。この分解能は次の式で計算できます。
.
パワーエレクトロニクス回路において最も高速な信号は、ほとんどの場合、パルス幅変調(PWM)ゲート駆動信号であるため、実効分解能は、HILデジタル入力が所定のスイッチング周波数で認識するPWMの最大分解能として定義できます。例えば、16ビット分解能(デューティサイクルの異なる値が65,000通り)のPWM信号がある場合、実効分解能はPWM周波数とサンプリング時間に応じて低くなる可能性があります。

ここまで、GDSオーバーサンプリングを用いてGDSサンプリング解像度を向上させる方法について説明しました。シミュレーション結果を改善するためにGDSオーバーサンプリングを利用するアルゴリズムは2つあります。
これら2つのアルゴリズムの詳細については、専用のドキュメントを参照してください。グローバルGDSオーバーサンプリングは表2から有効化でき、デフォルトで有効化されています。スイッチレベルGDSオーバーサンプリングはコンポーネントレベルで実装されており、それをサポートするコンポーネントで有効化できます。スイッチレベルGDSオーバーサンプリングがコンポーネントで有効化されている場合、設定で有効化されていても、そのサブサーキットではグローバルGDSオーバーサンプリングは無視される点にご注意ください。ただし、その他のすべてのサブサーキット(SPC)では、グローバルGDSオーバーサンプリングが実行されます。
GDSオーバーサンプリング周波数と最小タイムステップ
GDSオーバーサンプリングの分解能は、デバイスのIOタイミングによって定義されます。詳細については、各HILデバイスのドキュメント(ハードウェアマニュアルから入手可能)の「IOタイミング」セクションをご覧ください。つまり、HIL402、602+、604デバイスでは最大6.25ns、HIL101デバイスでは4.5ns、HIL404、HIL506、HIL606デバイスでは最大3.5nsとなります。