グローバルGDSオーバーサンプリング
グローバルGDSオーバーサンプリング機能について説明します。この機能は、GDSのサンプリング頻度を大幅に高め、サンプリングエラーを回避します。1つのシミュレーションステップで複数のGDS遷移が発生する可能性がある場合は、「スイッチレベルGDSオーバーサンプリング」を参照してください。
グローバルGDSオーバーサンプリングの概要
GDS オーバーサンプリングの目的は、 GDS オーバーサンプリングのドキュメントで説明されています。そのため、ここでは、GDS オーバーサンプリングの基本原理を理解していることを前提としています。GDSオーバーサンプリングの主な利点は、シミュレーション ステップの頻度よりもはるかに高い頻度で GDS をサンプリングできることです。グローバル GDS オーバーサンプリングにより、HIL デバイスは 1 つのシミュレーション ステップで入力を複数回サンプリングしながら、変更が発生した瞬間を記憶することができます。これを行うことで、サンプリング エラーを減衰し、はるかに優れたシミュレーション結果を得ることができます。これは、グローバル GDS オーバーサンプリングでは、GDS が変更された正確な時間に関する情報を使用して状態出力を補正するためです。図 1 は、簡単な例でのグローバル GDS オーバーサンプリングの図を示しています。アルゴリズムは、次の 3 つのフェーズに分けられます。
- GDS を高速にサンプリングし、GDS の変化が起こった瞬間を記録します。
- 状態空間出力は、GDS入力が誤っているために計算されます。一方、GDSが変化した時刻に関する情報は、次のシミュレーションステップで補償に使用される状態の値を計算するために使用されます。これらの値は出力には表示されません。
- 3番目のフェーズは状態の補正です。前回のシミュレーションステップで一時的に計算された状態出力と、GDSが変更された時刻の情報を用いて、新しい状態出力を計算します。計算と補正を終えると、出力には正しい状態値が表示されます。

グローバル GDS オーバーサンプリングの欠点は次のとおりです。
- アルゴリズムの複雑さによる追加の計算負荷と、補正専用の追加の時間ステップの形での追加の遅延。
- 各サブサーキット(SPC)内のGDS遷移は、1回のシミュレーションステップで1つだけ処理できます。1回のシミュレーションステップで複数のGDS遷移が発生する可能性がある場合は、 「スイッチレベルGDSオーバーサンプリング」を参照してください。
グローバル GDS オーバーサンプリングは表 2から有効にすることができ、デフォルトで有効になっています。
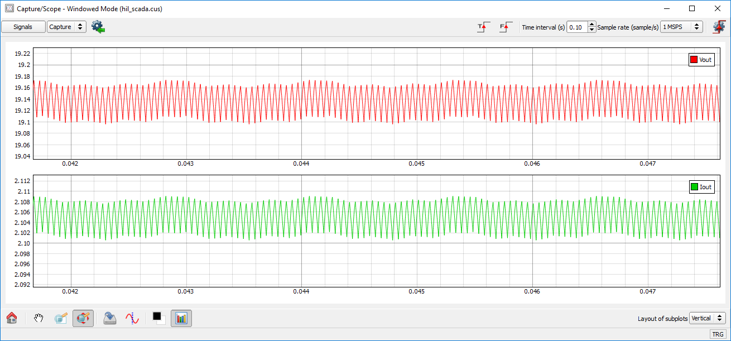
スイッチング周波数が 20kHz の Boost サンプル モデルと、ループバックで利用される PWM 変調器ブロックを使用すると、グローバル GDS オーバーサンプリングを使用する場合と使用しない場合の違いを確認できます。図 2 は、グローバル GDS オーバーサンプリングを無効にした状態での、定常状態の動作における固定 PWM デューティ サイクルの出力電圧と電流を示しています。両方のグラフの変動は、未補正のサンプリング エラーによるもので、実際のシステムでは予期されません。1µS のシミュレーション ステップでは、有効分解能は 6 ビット未満です。つまり、シミュレーターは PWM 周期ごとに約 50 のサンプルを認識することになり、デューティ サイクルの検出が不正確になります。このため、固定 PWM デューティ サイクルの定常状態では低周波の電圧と電流の変動がありますが、これは実際のシステムでは見られないものです。
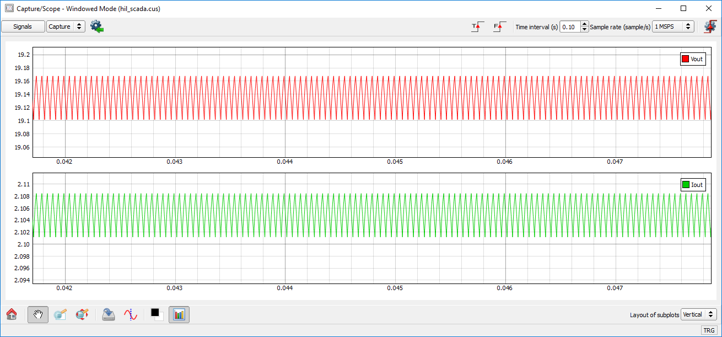
しかし、グローバルGDSオーバーサンプリングを有効にすると、サンプリング周期が大幅に短くなり、実効分解能が約13ビットまたは12ビットに増加します。PWM周期あたりのサンプル数の増加と、GDSが変化する正確なタイミングに基づいて状態出力を補正するアルゴリズムにより、図3に示すように、予期せぬ変動がなく、はるかに正確な結果が得られます。
GDSオーバーサンプリング周波数と最小タイムステップ
GDSオーバーサンプリングの分解能は、デバイスのIOタイミングによって定義されます。詳細については、各HILデバイスのドキュメント(ハードウェアマニュアルから入手可能)の「IOタイミング」セクションをご覧ください。つまり、HIL402、602+、604デバイスでは最大6.25ns、HIL101デバイスでは4.5ns、HIL404、HIL506、HIL606デバイスでは最大3.5nsとなります。