直列補償器
伝送線路の物理的なインダクタンスを補償するための直列補償器コンポーネントの説明。
表1に示す直列補償器コンポーネントは、マイクログリッドコアライブラリカテゴリのFACTSサブカテゴリに属する回路図エディタライブラリブロックです。これは三相コンポーネントであり、送電線の物理的インダクタンスを補償することで、送電線にかかる電圧降下を低減できます。コンポーネントモデルは、各相ごとにコンデンサと金属酸化物バリスタ(MOV)で構成されています。
| 成分 | コンポーネントダイアログウィンドウ | コンポーネントパラメータ |
|---|---|---|
直列補償器 |
 |
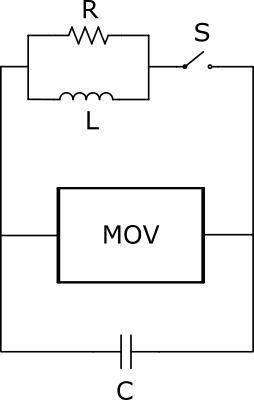
直列補償器の回路図ブロック図
このコンポーネントは、図1に示すように、MOVモデルと並列に接続されたコンデンサ(C)とバイパススイッチ(S)で構成されています。MOVは、ダイオードレッグ、電圧源、抵抗器の組み合わせとしてモデル化されています。エネルギーカウンタブロックは、MOVを流れるエネルギーを計算し、定義された制限値(「バイパススイッチ」タブで設定)に達するとバイパススイッチを閉じる信号を送信します。
コンポーネントダイアログボックスとパラメータ
直列補償器コンポーネント ダイアログ ボックスは、コンポーネントのパラメータを指定するための 3 つのタブで構成されています。
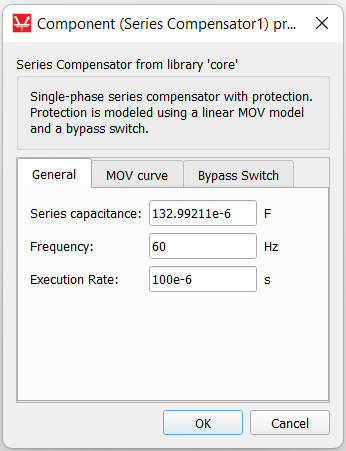
タブ: 一般
このコンポーネント タブでは、直列補償器の一般的なパラメータを指定できます。
| パラメータ | コードネーム | 説明 |
|---|---|---|
| 直列容量 | C | ライン補償に使用される容量の値。[F] |
| 頻度 | fc_sc | システムの周波数。[Hz] |
| 実行率 | 実行率 | 内部信号処理コンポーネントの実行速度。[秒] |
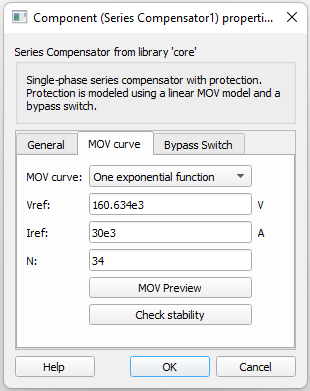
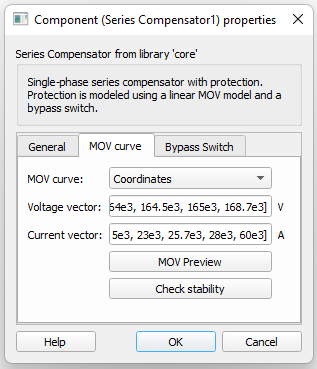
タブ: MOVカーブ
このコンポーネントタブでは、様々なMOV曲線を指定できます。現在、4種類のデータ入力が利用可能です:指数関数1つ、指数関数3つ、手動調整、座標。 「MOVプレビュー」ボタンと「安定性チェック」ボタンはすべてのオプションに用意されており、データ入力からMOV曲線を確認し、シミュレーションが数値的に不安定になっていないかを確認できます。シミュレーションは、入力データから得られた曲線のTyphoon HIL線形表現を考慮して実行され、 「MOVプレビュー」ボタンから確認できます。
| パラメータ | コードネーム | 説明 |
|---|---|---|
| Vref | 副社長 | MOV伝導に対して定義された電圧閾値。[V] |
| イレフ | イレフ | MOVの電圧レベルがVrefに達したときにMOVを流れる電流。[A] |
| 北 | n_exp | MOV曲線を決定する関数の指数値。このパラメータを変更することで、曲線を必要に応じて調整できます。 |
直列補償器モデル「MOV 曲線 - 1 つの指数関数」は次のとおりです。
| パラメータ | コードネーム | 説明 |
|---|---|---|
| Vref | 副社長 | MOV伝導に対して定義された電圧閾値。[V] |
| イレフ | イレフ | MOVの電圧レベルがVrefに達したときにMOVを流れる電流。[A] |
| 北 | n_exp | MOV曲線を決定する関数の指数値。このパラメータを変更することで、曲線を必要に応じて調整できます。 |
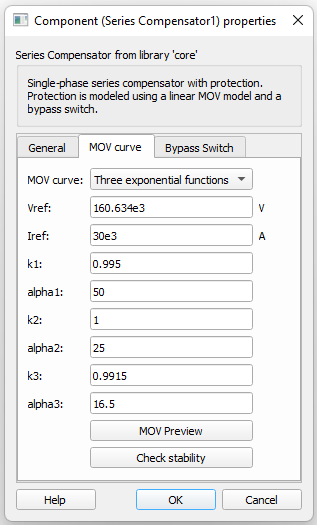
直列補償器モデル「MOV 曲線 - 3 つの指数関数」は次のとおりです。
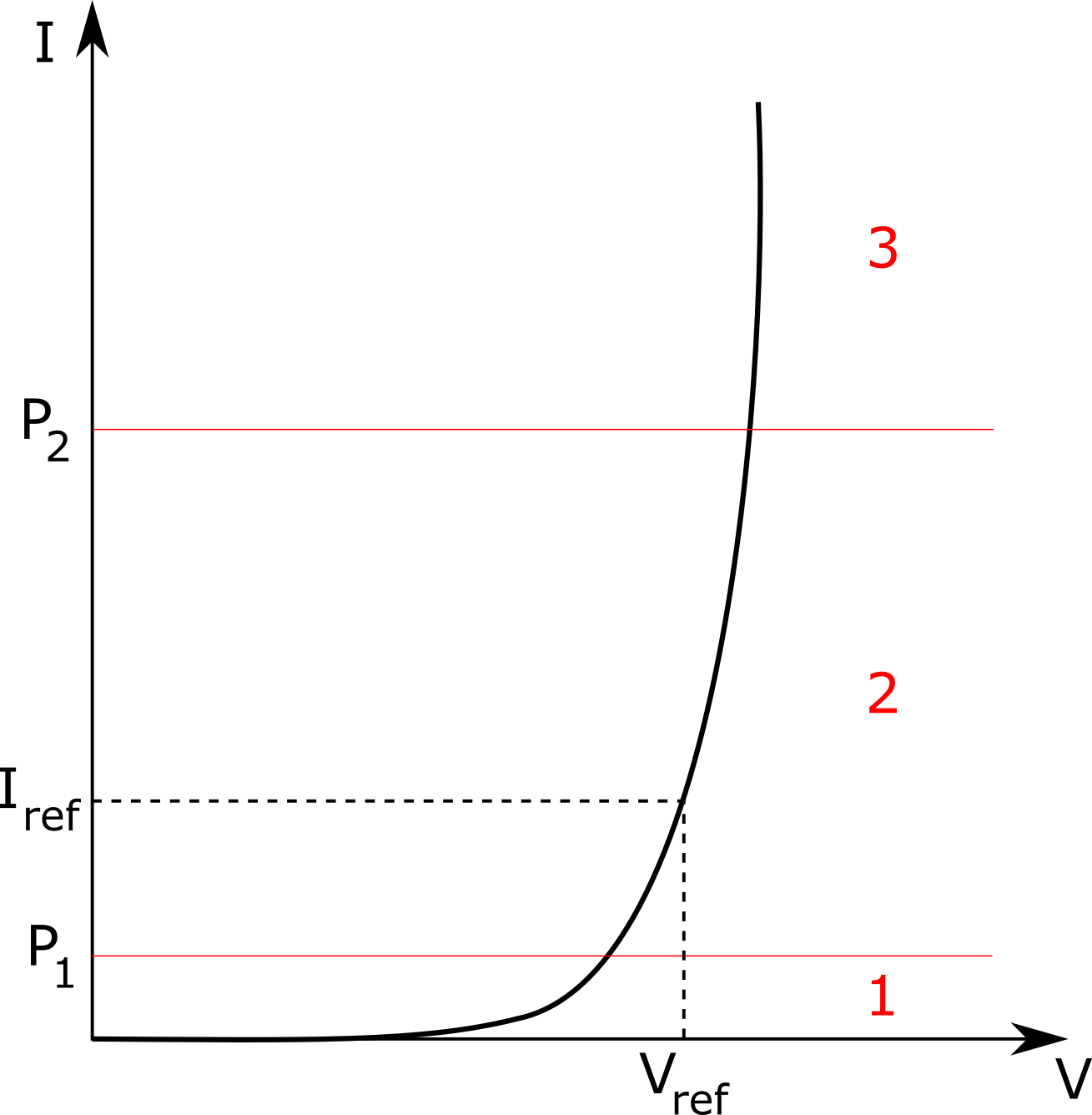
あるセグメントから別のセグメントへの遷移ポイントは、次の要素によって決まります。
ここ:
| パラメータ | コードネーム | 説明 |
|---|---|---|
| 電圧ベクトル | v_ベクトル | MOV曲線の電圧値のベクトル。[V] |
| 現在のベクトル | i_ベクトル | 電圧ベクトルの値に関連付けられた電流値のベクトル。[A] |
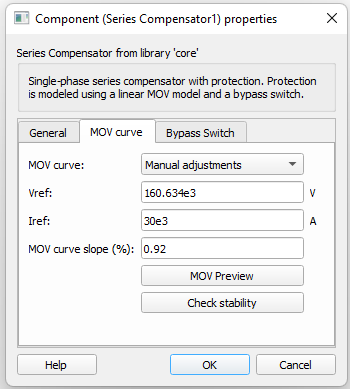
| パラメータ | コードネーム | 説明 |
|---|---|---|
| Vref | 副社長 | MOV曲線の傾き[V] |
| イレフ | イレフ | MOVの電圧レベルがVrefに達したときにMOVを流れる電流。[A] |
| MOV曲線の傾き | 移動勾配 | 曲線のパーセンテージ傾斜。0 は 0 度の傾斜、1 は 89.9999 度の傾斜を意味し、角度参照は線のブレーク ノードにあります。 |
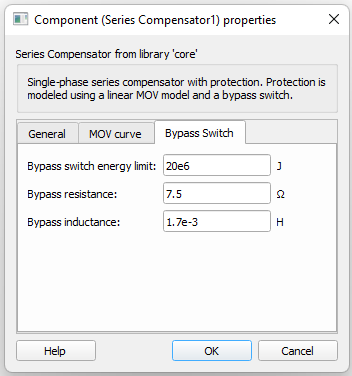
タブ: バイパススイッチ
バイパス スイッチは、過剰なエネルギー吸収の際に MOV が熱定格を超えないように保護するために使用されます。
| パラメータ | コードネーム | 説明 |
|---|---|---|
| バイパススイッチのエネルギー制限 | バイパスエネルギー | スイッチを閉じるためのエネルギー閾値を定義します。[J] |
| バイパス抵抗 | バイパス_R | バイパス分岐の抵抗[Ω] |
| バイパスインダクタンス | バイパス_L | バイパス分岐のインダクタンス[H] |
コンポーネントの制限
このコンポーネントを使用する場合、一部のシミュレーション条件で数値不安定性が発生する可能性があります。モデルの特性上、時間ステップの制限により、コンデンサの充放電プロセスに関連する数値不安定性がシミュレーションに発生する可能性があります。充放電プロセスが非常に高速で、時間ステップ計算間で情報が失われる可能性がある場合、シミュレーションが不安定になる可能性があります。Tau/simulation_time_step > 2の関係を維持することを強くお勧めします。ここで、TauはコンポーネントのRC時定数です。必要なパラメータを入力後、 「安定性チェック」ボタンをクリックすると、安定性解析を確認できます。安定性条件の評価は、モデルのコンパイル時にも行われます。
サンプルモデル
全体的な動作と制御方法論は、次の例を使用するとよりよく理解できます。
モデル名:直列補償器 example.tse
SCADAインターフェース:直列補償器の例.cus
パス: examples/models/microgrid/FACTS/series compensator example