標準化されたプロトコルを介して絶対的な機械エンコーダ位置を提供する
このセクションでは、絶対エンコーダ位置データを提供するマシンの機能について説明します。
概要
アブソリュートエンコーダは、機械のローター位置と回転数を正確に測定できます。シングルターンアブソリュートエンコーダの出力はシャフトの現在の位置を示すため、角度変換器として機能します。マルチターンアブソリュートエンコーダの出力は、機械のローターの現在の回転数を示します。
HIL デバイス上で実行されるマシンは、EnDat、BiSS、または SSI 標準化プロトコルを使用してエンコーダ データを外部デバイスに送信できます。
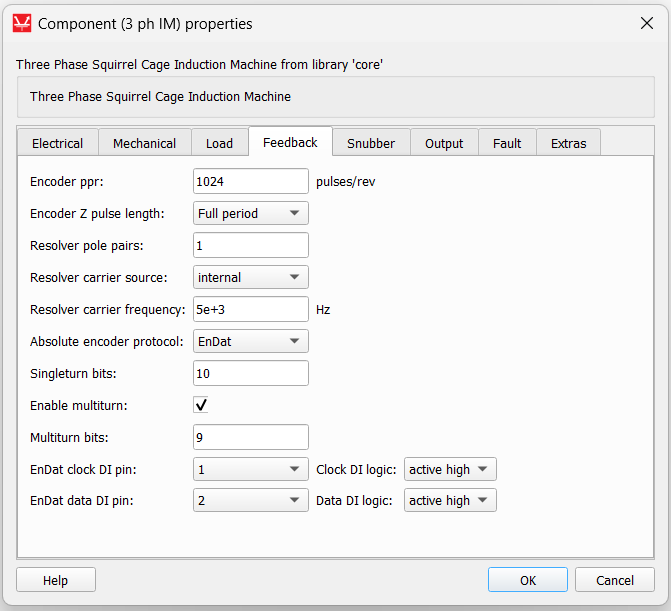
シングルターンアブソリュートエンコーダの分解能は、選択したマシンのコンポーネントプロパティダイアログの「フィードバック」タブにある「エンコーダppr」プロパティで定義されます。選択したアブソリュートエンコーダプロトコルを介してマシンのローター位置情報を完全に伝送するには、以下の条件を満たす必要があります。
ここで、 nはシングルターンビット数です。割り当てられたエンコーダppr値が2 nより大きい場合、シングルターンエンコーダを介して送信される機械ローター位置情報は不完全となり、エラーが発生します。エンコーダppr値が2 nより小さい場合、シングルターンアブソリュートエンコーダのMSBの一定数がゼロになります。
「マルチターンを有効にする」プロパティにチェックを入れると、機械ローターの現在の回転数に関する情報を提供するためのマルチターンビットの数を指定できます。機械ローターが1回転するたびに、マルチターンカウンタが増加します。
プロトコルの制限
実装されたプロトコルの制限は次のとおりです。
- 一般的な:
- バイナリエンコード
- CRCなし
- 日付:
- エンコーダ位置値送信コマンド(コード000111)のみがサポートされています。このEnDat 2.1コマンドはEnDat2.2と互換性があります。
- 位置値は中断されたクロックでサンプリングされる
- ビSS:
- ポイントツーポイント構成のみがサポートされています
- シングルサイクルデータ(SCD)のみがサポートされています
- 右揃え
- SSI:
- ポイントツーポイント構成のみがサポートされています
デジタル入力構成
外部デバイスからのクロック信号とデータ信号は、HILデバイスの任意のデジタル入力ピンに接続する必要があります。これらのピンは、マシンダイアログウィンドウで定義する必要があります。「フィードバック」タブで、クロック信号とデータピンの値を定義する必要があります。接続される信号は、接続される外部デバイスに応じて、アクティブハイまたはアクティブローになります。
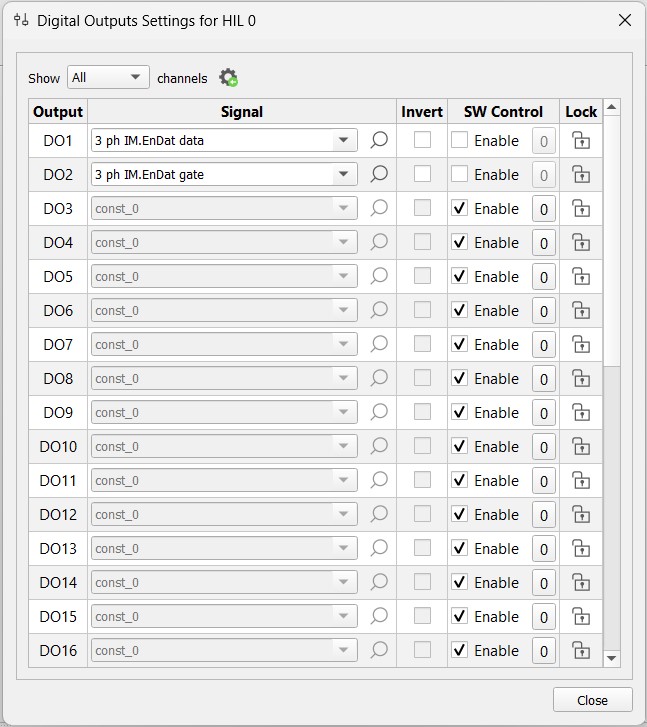
デジタル出力構成
HILデバイスからのデータ(machine_name.EnDatデータ、machine_name.EnDatゲート、machine_name.BiSSデータ、machine_name.SSIデータ)は、任意のデジタル出力に設定できます。デジタル出力は、HIL SCADAの「デジタル出力」ウィンドウで定義されます(図2 )。