CHAdeMOプロトコル
Typhoon HIL ツールチェーンにおける CHAdeMO 1.0 プロトコル実装の説明。
IEC 61851規格
CHAdeMOプロトコルを理解するには、まずこのプロトコルの使用法を定義するIEC 61851規格について触れることが重要です。このセクションでは、この規格とCHAdeMOがどのように関連しているかについて説明します。
IEC 61851 - 電気自動車導電性充電システム[ 1 ]規格は、最大1000Vの標準AC供給電圧および最大1500VのDC電圧で電気自動車を充電するための車載機器とオフボード機器の特性を定義しています。
- 充電モード1 - AC充電。標準の単相/三相コンセントを介してEVを主電源に接続します。最大16A、250/480V。充電ケーブルに保護装置は内蔵されていません。
- 充電モード2 - AC充電。標準の単相/三相コンセントを介してEVを主電源に接続します。最大32A、250/480V。充電ケーブルに保護装置が内蔵されています。
- 充電モード3 - 専用AC充電ステーションを使用したAC充電。必須のPWM信号とオプションの高レベル通信(HLC)
- 充電モード4 - 専用DC充電ステーションを使用したDC充電。PWM信号と高レベル通信(HLC)が必須
- システム A - 物理/データ層は CAN バス A インターフェイスを経由し、アプリケーション層は IEC 61851-24 規格で定義されます。
- システム B - 物理/データ層は CAN バス B インターフェイスを経由し、アプリケーション層は GB/T 27930 標準によって定義されます。
- システム C - 物理層/データ層は電力線通信 (PLC) を介して行われ、アプリケーション層は ISO 15118-2 プロトコルによって定義されます。
言い換えれば、CHAdeMO プロトコルは、システム A が適用される場合の DC 充電モードの EV と EVSE 間のデジタル通信層を定義する役割を担います。
CHAdeMOプロトコル
CHAdeMO(路上車両-車両系統通信インターフェース)[ 2 ]は、東京電力と日本の大手自動車メーカー5社が結成したCHAdeMO協議会が2010年に開発した電気自動車用の急速充電システムである。
これは、2014年以来欧州連合で販売される電気自動車に義務付けられている複合充電システム(CCS)、欧州以外のスーパーチャージャーネットワークで使用されているテスラの北米充電基準(NACS)、および中国のGB/T充電基準と競合する。
第一世代のCHAdeMOコネクタは、独自の電気コネクタを介して500V、125Aの直流電流で最大62.5kWの電力を供給し、30分で約120キロメートル(75マイル)の走行距離を延長します。このコネクタは、いくつかの国際的な自動車充電規格に採用されています。第二世代の仕様では、1kV、400Aの直流電流で最大400kWの電力を供給できます。CHAdeMO協会は現在、中国電力評議会(CEC)と共同で、900kWの電力供給を目標とした第三世代規格を「ChaoJi」という仮称で開発中です。CHAdeMOに関する詳細は、IEC 61851-23 ANNEX AAおよびJIS/TSD0007 [ 2 ]で定義されています。
- 物理的設計:CHAdeMOコネクタは、車両との適切な位置合わせと接続を確保するために、特定のパターンで配置された9本のピンを備えた単一のプラグを備えています。このコネクタは、DC急速充電専用に設計されています。
- 電圧定格: CHAdeMO コネクタの最大定格電圧は 500 V DCで、電気自動車の急速充電が可能です。
- 電流定格: CHAdeMO コネクタは最大 200 A の充電電流をサポートするように設計されており、電気自動車の急速充電を可能にします。
- 通信プロトコル:CHAdeMOコネクタは、CAN(Controller Area Network)バスシステムをベースとした通信プロトコルを使用して、車両と充電器間の通信を実現します。このプロトコルにより、自動認証、充電制御、状態監視などの機能を実現できます。
- 安全機能:CHAdeMOコネクタには、過電圧、過電流、その他の潜在的な危険から保護するためのさまざまな安全機能が搭載されています。これらの機能には、地絡検出、短絡保護、温度監視が含まれます。
- 可用性: CHAdeMO コネクタは世界中で (特に日本) 広く使用されており、日産、三菱、スバルなどの日本の自動車メーカーのほとんどの電気自動車、および他のメーカーの一部のモデルでサポートされています。
- 動作:CHAdeMOはマスタースレーブモードで動作し、通信対応のバッテリー管理システム(BMS)を介して充電プロセスとさまざまなバッテリーパラメータを制御します。BMSは、バッテリーの現在の充電状態、充電電流、DC電圧、バッテリー温度をチェックします。
充電プロセスと充電制御のためのDC EV充電ステーションと車両間の通信
ステーションと車両間の通信は、コントロールパイロット(CP、CP2、CP3)、近接回路CS、デジタル通信回路COM1およびCOM2を介して行われます。CPとCP2は、ステーションから車両へ「充電準備完了」や「充電完了」などの信号を送信します。CP3は、車両からステーションへ充電開始またはシャットダウンの指示を送信するために使用されます。充電ステーションの出力定格やバッテリーの最大電圧など、IEC 61851-24 [ 2 ]の附属書Aに記載されている数値パラメータは、COM1とCOM2を介して交換されます。
Typhoon HILツールチェーンにおけるCHAdeMOプロトコル実装
CHAdeMOは、Typhoon HIL Control CenterのCANバスプロトコルコンポーネントに基づいて実装されています。CHAdeMOロジックとステートマシンは、 C関数コンポーネントを使用して、CHAdeMOコンポーネント内でC++コードで実行されます。以下のTyphoon HILデバイスでサポートされています: HIL101、HIL404、HIL602+、HIL604、HIL506、HIL606 。
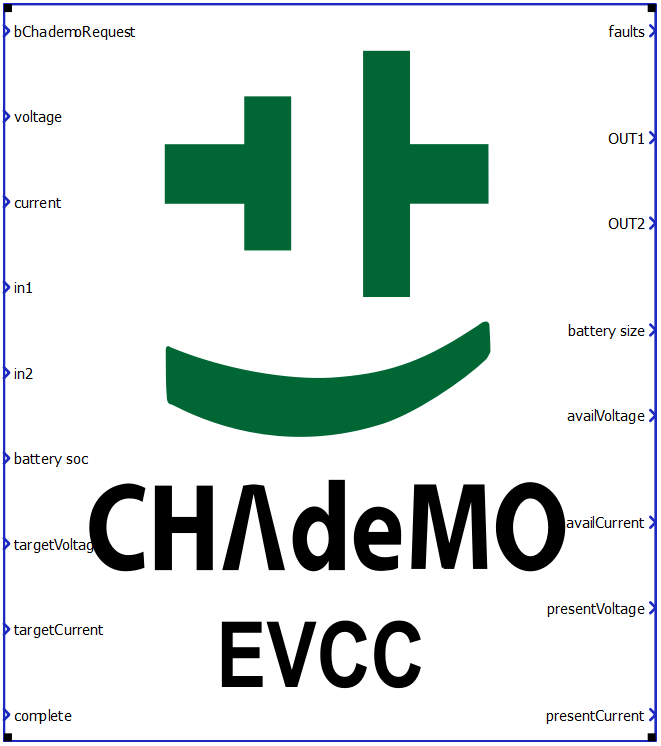
電気自動車側の通信は、回路図エディター コア ライブラリの Communication → EV charging → CHAdeMO フォルダーにある CHAdeMO EVCC コンポーネントを使用して実装されます。
CHAdeMO EVCCコンポーネント
CHAdeMO EVCCコンポーネントは、プロトコルのEV側を実装します。このコンポーネントは通信インターフェースのみを実装し、コントローラ自体は実装しないことを明確にすることが重要です。つまり、このコンポーネントはEVCCとSECC間で必要なメッセージを中継するためだけに使用されます。コントローラ(またはロジック)部分は、ユーザーが信号処理コンポーネントを用いて実装する必要があります。
CHAdeMO EVCC コンポーネントを表 1に示します。
| 成分 | コンポーネントダイアログウィンドウ | プロパティ |
|---|---|---|
 |
 |
|
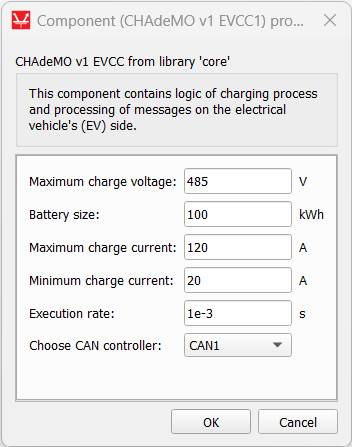
コンポーネントパラメータについては表2で説明されている。
| 名前 | 物件名 | デフォルト値 | 説明 |
|---|---|---|---|
| 最大充電電圧 | 最大充電電圧 | 0 | EVがサポートできる最大電圧を定義します。これはバッテリーの直列セル数に関係します。 |
| バッテリーサイズ | パックサイズKWH | 0 | EV バッテリー容量を kWh で定義します。 |
| 最大充電電流 | アスクアンプス | 0 | EV バッテリーの充電中に許容される最大電流。 |
| 最小充電電流 | 最小充電アンペア数 | 0 | EV バッテリーの充電中に許容される最小電流。 |
| 実行率 | 除外率 | 0 | CHAdeMOコンポーネントの実行レート。1ミリ秒(1e-3)の使用を推奨します。 |
| CANコントローラを選択 | CANコントローラ | CAN1 | CHAdeMO メッセージが実行される CAN コントローラ。 |
入出力端子と状態値
信号処理信号は、端末を使用して CHAdeMO コンポーネントとの間でやり取りされます。
すべての値がすべての端末で許容され、正しいわけではありません。端末によっては整数値、実数、状態値を使用するものがあります。表3は、各端末の使用方法を説明しています。
| 名前 | 説明 | 値の型 |
|---|---|---|
| bChademoリクエスト | CHAdeMOリクエストを充電器に送信するか(1)、しないか(0)を定義します。 | 状態 (0,1) |
| 電圧 | EVバッテリー実電圧[V] | 本物 |
| 現在 | 測定された充電電流 | 本物 |
| IN1 | CP制御パイロット信号検出 | 符号なし整数 |
| IN2 | CP2制御パイロット信号検出 | 符号なし整数 |
| バッテリーSoC | バッテリーの充電状態[%] | 実数(0 - 100) |
| ターゲット電圧 | EVCCからSECCに要求される、EVバッテリーを充電するための所望の電圧リファレンス[V] | 本物 |
| ターゲットカレント | EVCCからSECCに要求される、EVバッテリーを充電するための所望の電流リファレンス[A] | 本物 |
| 完了 | ChargeCompleteを0(未完了)または1(完了)に設定して、充電セッションが完了したと定義します。 | 状態 (0,1) |
| 欠点 | EVがエラー状態(1)かそうでないか(0)を定義します。 | 状態 (0,1) |
| OUT1 | コントロールパイロットCP3がKコンタクタによって制御されるかどうか(1)または制御されないかどうか(0)を定義します。 | 状態 (0,1) |
| OUT2 | EVコンタクタが充電を有効にするか(1)、無効にするか(0)を定義します。 | 状態 (0,1) |
| バッテリーサイズ | 完全に充電されたバッテリーの充電状態 [%] | 実数(0 - 100) |
| 利用可能な電圧 | EVSEが許容する最大電圧[V] | 本物 |
| 利用可能現在 | EVSEが受け入れる最大電流[A] | 本物 |
| 現在の電圧 | EVSE DC接点の電圧[V] | 本物 |
| 現在現在 | EVSEで測定された電流[A] | 本物 |
CHAdeMO EVCCコンポーネントの基本ロジック
CHAdeMO通信プロトコルは5つのCANメッセージで構成されており、そのうち3つは車両側専用、2つは充電ステーション専用です。これらのメッセージは、Typhoon HIL Control Centerソフトウェアに実装されています。
充電ステーションと車両はそれぞれ、充電パラメータと充電プロセス中のエラー報告用のCANメッセージを1つずつ持っています。さらに、車両は計算された充電時間と充電状態を表すCANメッセージを持っています。このプロジェクトではCAN 2.0A規格を採用しています。CANバスメッセージの最大長は8データバイトです。
実行ループはC/C++プログラミング言語を用いてC関数ブロック内に実装されています。このブロックでは、C++ファイル(.cpp)とヘッダーファイル(.h)のインポートも可能です。このブロックへの入力は、充電器からEVに受信されたメッセージと補助変数で構成されます。このブロックからの出力は、EVから充電器に送信されたメッセージと、シミュレーション中に適切な動作を確認するために監視される追加変数で構成されます。
CHAdeMOコンポーネント内のメイン関数は、CANバス経由で受信したメッセージを確認し、送信する必要があるパラメータを設定します。また、受信済みおよび送信予定の様々なパラメータの値を監視・検証します。これらの値に基づいて、電気自動車と充電ステーションの関係が定義され、WAIT_FOR_EVSE_PARAMSやRUNNING(充電プロセス)などの様々な状態間の遷移が行われます。
仮想HILサポート
Virtual HILは現在このプロトコルをサポートしていません。非リアルタイム環境(例:ローカルコンピュータでモデルを実行する場合)を使用する場合、このコンポーネントへの入力は破棄され、このコンポーネントからの出力はゼロになります。
参考文献
- 国際電気標準会議(IEC)、「IEC 61851、電気自動車の導電性充電システム - パート1:一般要求事項」、2010年、14ページ
- 国際電気標準会議(IEC)、「IEC 61851、電気自動車導電性充電システム - パート23:DC電気自動車充電ステーション」、2014年、33~70ページ