ISO 15118-20プロトコル
Typhoon HIL ツールチェーンにおける ISO 15118-20 プロトコルの実装について説明します。
ISO 15118-20プロトコル
ISO 15118-20 プロトコルは、ISO 15118 規格の特定の部分であり、 ISO 15118-2 プロトコルの拡張です。
- 双方向電力伝送(BPT):車両の充電と放電を行う機能
- ワイヤレス電力伝送(WPT):IEC 61980プロトコルの補足として、車両とワイヤレス充電器間で必要な情報を交換するためのメッセージの定義
- 自動接続装置(ACD):伝導によるエネルギー伝送のための自動接続・切断プロセス。典型的な例としては、電気バスのパンタグラフが挙げられる。
- ダイナミック制御モード:EVは充電ステーションに制御権を譲り、充電器は充電スケジュールの交渉なしに単一の電力設定ポイントを提供します。
- より強力なデータセキュリティ:
- TLS 1.3はすべてのユースケースで必須です
- より長いキーを持つ、より安全な新しい暗号スイート: TLS_AES_256_GCM_SHA384、TLS_CHACHA20_POLY1305_SHA256
- 新しい楕円曲線はed448と命名されました
- より簡単な複数契約処理:EVは、1つの契約証明書だけでなく複数の契約証明書を使用して充電ステーションに自身を識別できます。
ISO 15118-20 DC充電セッションのメッセージシーケンス
ISO 15118-20 [ 2 ]に従って実行されるDC充電セッションの充電プロセスを図1に示します。
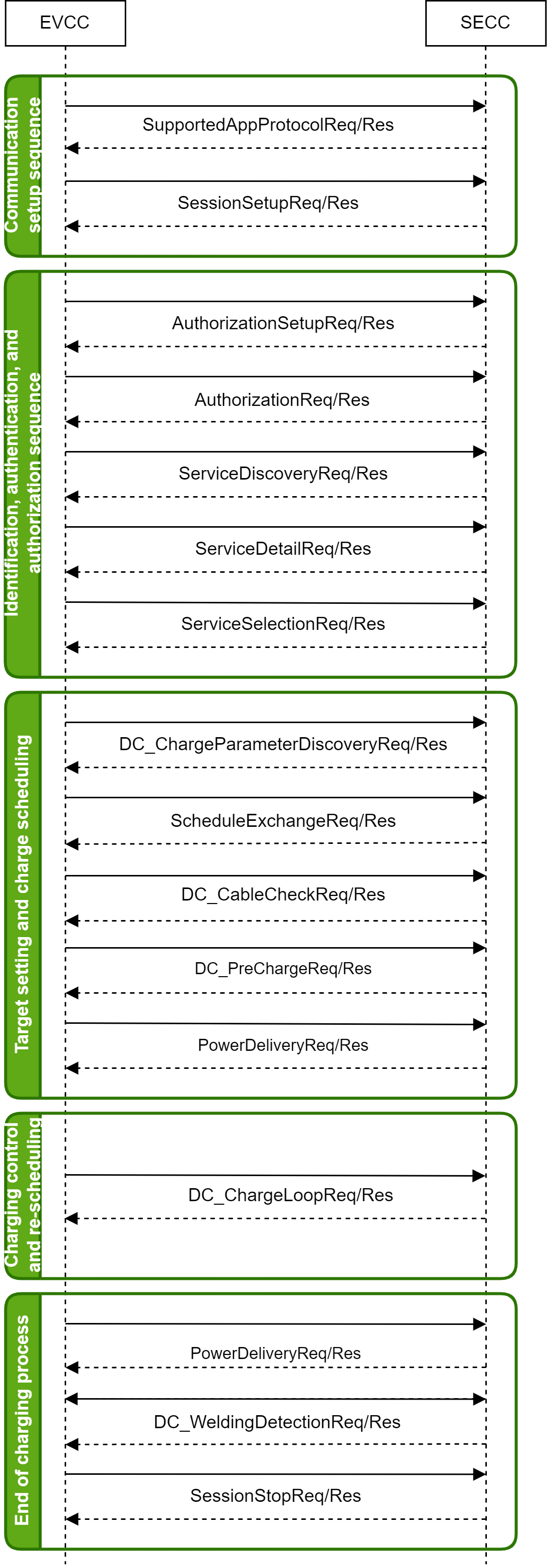
- 通信セットアップシーケンス:
- SupportedAppProtocolReq/Res :EVと充電ステーションは、このリクエスト・レスポンス・メッセージのペアを使用してプロトコルバージョンを合意します。この移行フェーズでは、EVと充電ステーションの両方が同じバージョンのISO 15118に対応していることが重要です。互換性がない場合、ISO 15118充電セッションを開始することはできません。
- SessionSetupReq/Res :EVCCはSessionSetupReqメッセージを使用してV2G通信セッションを確立します。SECCはSessionSetupResメッセージを使用して、新しいセッションの確立または以前の通信セッションへの接続が成功したかどうかを、ResponseCodeを添付してEVCCに通知します。
- 識別、認証、承認のシーケンス:
- AuthorizationSetupReq/Res : AuthorizationSetupReq メッセージはヘッダー以外は空で、認証方法の選択プロセスを開始するためにのみ必要です。SECC は AuthorizationSetupRes メッセージを使用して、利用可能な認証モードと証明書インストールサービスが利用可能かどうかに関する情報を提供します。
- AuthorizationReq/Res :AuthorizationReqメッセージは、EVCCからSECCへ課金の承認を要求するために送信されます。EVCCに関する情報を提供し、SECCに課金リクエストの検証と承認を求めます。AuthorizationReqメッセージは、PnCの場合、チャレンジ署名と証明書(および事前に検証されていない場合はその証明書チェーン)を検証した後にSECCによって生成されます。一方、EIMの場合、AuthorizationResメッセージは外部入力やSECCの設定/構成に基づいて送信されます。
- ServiceDiscoveryReq/Res :ServiceDiscoveryにより、EVCCはSECCが提供するすべてのサービスを検出できます。EVCCはServiceDiscoveryReqメッセージを送信することで、SECCが提供するすべてのサービスに関する情報をSECCに送信するよう指示します。さらに、EVCCはサポートされているサービスIDのリストを送信することで、特定のサービスに限定することもできます。EVCCのServiceDiscoveryReqメッセージを受信すると、SECCはServiceDiscoveryResメッセージを送信します。このメッセージには、SECCで利用可能なすべてのサービスのリストが含まれています。
- ServiceDetailReq/Res :EVCCはServiceDetailReqメッセージを送信することにより、EVSEが提供するサービスに関する特定の追加情報をSECCに送信するよう要求します。EVCCのServiceDetailReqメッセージを受信すると、SECCはServiceDetailResメッセージを送信し、サービスに関する詳細情報を提供します。
- ServiceSelectionReq/Res : SECC によって提供されるサービスに基づいて、このメッセージ ペアは選択されたサービスと関連するパラメーター セットの送信を許可します。
- 目標設定と料金スケジュール:
- DC_ChargeParameterDiscoveryReq/Res :EVSE(SECC)での充電が承認されると、EVCCとSECCはDC_ChargeParameterDiscoveryメッセージペアを用いてエネルギー転送パラメータをネゴシエートします。DC_ChargeParameterDiscoveryReqメッセージを送信することで、EVCCはSECCにエネルギー転送パラメータを提供します。このメッセージは、EVのステータス情報、つまりEV充電システムの能力を提供します。DC_ChargeParameterDiscoveryResメッセージでは、SECCはグリッドの観点から適用可能な充電パラメータを提供します。
- ScheduleExchangeReq/Res :ChargeParameterDiscoveryメッセージペアでエネルギー転送パラメータをネゴシエートした後、SECCはEVCCが最初に制限する可能性のあるスケジュールに関する情報を提供します。EVCCはScheduleExchangeReqメッセージを送信することで、SECCにエネルギー転送パラメータを提供します。このメッセージは、EVのステータス情報と、EVの再充電に必要な推定エネルギー量やユーザーがEVSEを離れる予定時刻などの追加のエネルギー転送パラメータを提供します。ScheduleExchangeResメッセージでは、SECCはグリッドの観点から適用可能なエネルギー転送パラメータを提供します。
- DC_CableCheckReq/Res :直流電力伝送の安全性を確保するため、ケーブルチェックを実施する必要があります。DC_CableCheckReqはEVSEのケーブルチェック状態を問い合わせ、例えばEV側のコネクタがロックされているか、EVが電力伝送の準備ができているかなどをEVSEに伝えます。EVCCからDC_CableCheckReqを受信すると、SECCはケーブルチェックの結果とEVSEの状態をEVCCに通知するDC_CableCheckResを送信します。
- DC_PreChargeReq/Res :PreChargeは、EVSEの出力電圧をEVバッテリー電圧に調整するために使用されます。DC_PreChargeReqは、EV側からPreChargeプロセスを開始するために使用されます。EVCCからDC_PreChargeReqを受信すると、SECCはEVにEVSEの状態と現在のEVSE出力電圧を通知するDC_PreChargeResを送信します。
- PowerDeliveryReq/Res : 電力供給メッセージ交換は、EVSE が出力電源コンセントに電圧を供給し、EV が電力転送を開始できる時点を示します。
- 充電制御と再スケジュール:
- DC_ChargeLoopReq/Res :EVはDC_ChargeLoopReqを送信することで、EVSEに所定の電流を要求します。また、目標電圧、電流、および電圧差も転送されます。EVCCからDC_ChargeLoopReqを受信すると、SECCはEVSEの状態と現在のEVSE出力電圧および電流をEVに通知するDC_ChargeLoopResを送信します。
- 充電プロセスの終了:
- DC_WeldingDetectionReq/Res :この項で説明する溶着検出メッセージは、IEC 61851-23に準拠した溶着検出メカニズムの実装を可能にします。EVはDC_WeldingDetectionReqを送信することで、EVSE側への溶着検出を要求します。EVCCからDC_WeldingDetectionReqを受信すると、SECCはEVSEの状態と現在のEVSE出力電圧をEVに通知する溶着検出応答を送信します。
- SessionStopReq/Res :EVCCはSessionStopReqを送信することにより、エネルギー転送プロセスの終了を要求します。EVCCのSessionStopReqを受信すると、SECCはSessionStopResを送信し、エネルギー転送プロセスの終了が成功したかどうかをEVCCに通知します。
Typhoon HILツールチェーンにおけるISO 15118-20プロトコルの実装
IEC 61851では、EVCCとSECCはISO 15118-20に準拠した電力線通信(PLC)を介して通信すると定義されていますが、プロトコル自体はEthernetベースであり、Typhoon HILツールチェーンに実装されています。Typhoon HILデバイス( HIL402、HIL101、HIL404、HIL602+、HIL604、HIL506、HIL606)でサポートされています。EthernetをPLCに変換するには、 Green Phyモジュールなどの追加モデムを使用できます。
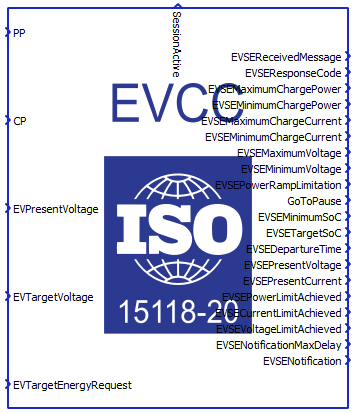
電気自動車側の通信は、回路図エディター ライブラリの Communication → EV charging → ISO 15118-20 フォルダーにある ISO 15118-20 EVCC コンポーネントを使用して実装されます。
ISO 15118-20 EVCCコンポーネント
ISO15118-20 EVCCコンポーネントは、プロトコルのEV側を実装します。このコンポーネントは通信インターフェースのみを実装し、コントローラ自体は実装しないことを明記することが重要です。つまり、このコンポーネントはEVCCとSECC間で必要なメッセージを中継するためだけに使用されます。コントローラ(またはロジック)部分は、ユーザーが信号処理コンポーネントを使用して実装する必要があります。
ISO 15118-20 EVCCコンポーネントは、 表1.| 成分 | コンポーネントダイアログウィンドウ | プロパティ |
|---|---|---|
 |
 |
|
| 名前 | 物件名 | デフォルト値 | 説明 |
|---|---|---|---|
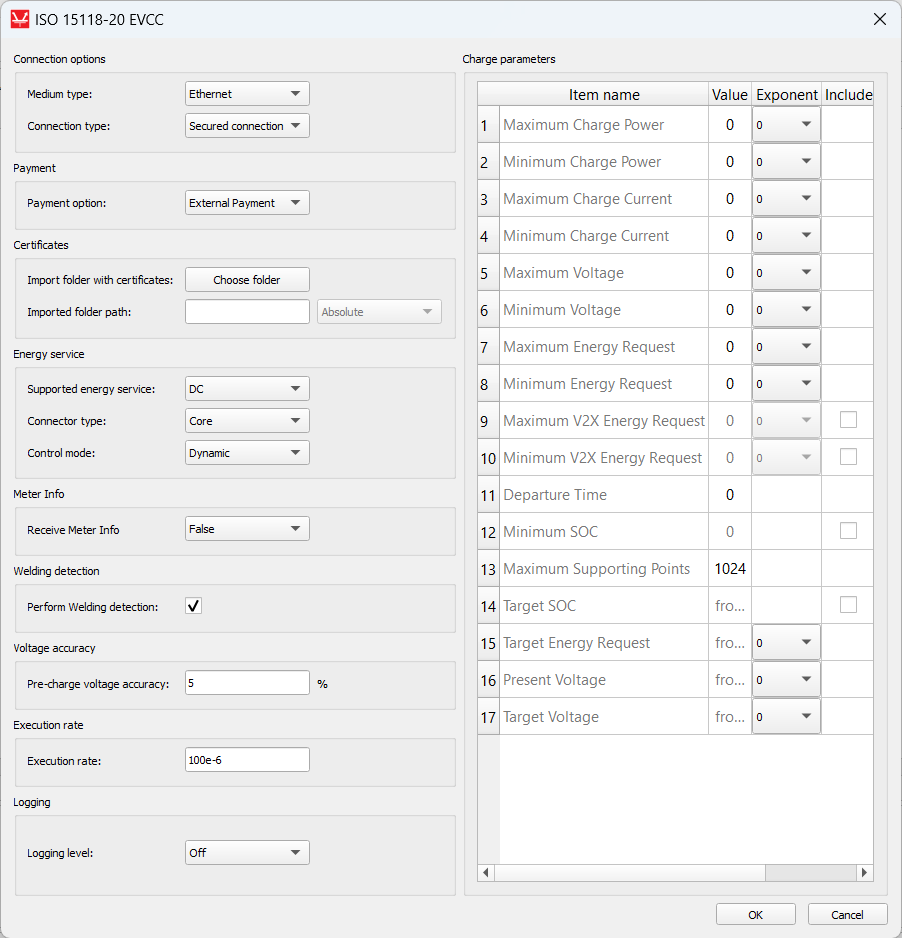
| 中型タイプ | 中型 | イーサネット | SECCとEVCCが通信する媒体の種類を選択します。EthernetとPLCの媒体タイプが利用可能です。 |
| 接続タイプ | 接続タイプ | 安全な接続 | EVとEVSE間の接続タイプを選択します。このプロトコルバージョンでは、セキュア接続が必須です。 |
| 支払い方法 | 支払いオプション | 外部支払い | EV が使用する予定の支払いオプションを選択します。 外部支払い そして 契約 お支払いオプションをご利用いただけます。 契約支払いオプションは使用可能ですが、現在の実装バージョンでは自動証明書のインストールはサポートされていません。 また、使用されている楕円曲線バージョンは、ISO 15118-20プロトコルで定義されているed448ではなく、ISO 15118-2プロトコルで定義されているsec256r1です。 |
| 証明書を含むフォルダをインポートする | フォルダ選択ボタン | 間違い |
必要な通信を確立するために EVCC にインポートされる SECC からの必要な証明書が含まれるフォルダーに移動します。 必要な証明書は次のとおりです。
|
| インポートされたフォルダのパス | フォルダパス | 「」 | 選択したフォルダーのファイルパスを表示します。 |
| パスタイプ | パスタイプ | 絶対 | 選択した値に応じて、フォルダーへのパスは絶対または相対になります。 |
| サポートされているエネルギーサービス | サポートされているエネルギーサービス | DC | EV に必要なエネルギー サービスを選択します。DC とDC BPT が利用可能です。 |
| コネクタタイプ | dc_コネクタ | コア | コネクタタイプを選択します。Core 、 Extended 、 Dual2 、 Dual4 が利用可能です。 |
| 制御モード | 制御モード | 動的 | 使用する制御モードを選択します。動的とスケジュールが利用可能です。 |
| メーター情報を受け取る | メーター情報の要求 | 間違い | このパラメータは、「True」に設定されている場合、EV が EVSE によって MeterInfo を受信することを示します。 |
| 溶接検出を実行する | 溶接検出リクエストを含める | 真実 | 溶接検出要求メッセージを通信セッションに含めるかどうかを選択します。 |
| プリチャージ電圧精度 | プリチャージ電圧精度 | 5 | IEC 61851規格では、突入電流を防止するため、EV側のメイン充電コンタクタは、EVSE出力電圧とバッテリー電圧の間に大きなオフセットがない場合にのみ閉じることができます。このオフセットは、充電前電圧精度によって定義されます。 |
| 実行率 | 実行率 | 100e-6 | ISO 15118-20 EVCC コンポーネントの実行率。 |
| ログレベル | ログレベル | オフ | ISO 15118-20 EVCCコンポーネントのログ記録優先度。選択可能なオプションは、オフ、情報、デバッグ、警告、エラーです。選択内容に応じて、そのランク以上のメッセージが表示されます。 |
| ログ出力 | ログ出力 | コンソール | ログ出力は、ログ メッセージが表示される場所を指定します。 |
| UDPポート | udp_port_edit | 65000 | 出力のログにUDPを選択した場合、メッセージはUDPブロードキャストネットワーク上に表示されます。UDPポートは、ログメッセージが表示されるポートを指定します。 |
| 充電パラメータ | 充電パラメータDC |
{
"maximum_charge_power": {"value": 0,
"exponent": 0},
"minimum_charge_power": {"value": 0,
"exponent": 0},
"maximum_charge_current": {"value": 0,
"exponent": 0},
"minimum_charge_current": {"value": 0,
"exponent": 0},
"maximum_voltage": {"value": 0,
"exponent": 0},
"minimum_voltage": {"value": 0,
"exponent": 0},
"maximum_energy_request":{"value": 0,
"exponent": 0,
"include": True},
"minimum_energy_request":{"value": 0,
"exponent": 0,
"include": True},
"maximum_v2x_energy_request":{"value": 0,
"exponent": 0,
"include": False},
"minimum_v2x_energy_request":{"value": 0,
"exponent": 0,
"include": False},
"departure_time": {"value": 0,
"include": True},
"minimum_soc": {"value": 0,
"include": False},
"maximum_supporting_points": {"value" : 1024},
"target_soc": {},
"target_energy_request":{"exponent": 0},
"present_voltage":{"exponent": 0},
"target_voltage":{"exponent": 0},
"target_current": {"exponent":0},
"maximum_discharge_power": {"value": 0,
"exponent": 0},
"minimum_discharge_power": {"value": 0,
"exponent": 0},
"maximum_discharge_current": {"value": 0,
"exponent": 0},
"minimum_discharge_current": {"value": 0,
"exponent": 0}
}
|
課金パラメータは、 EVリクエストを記述するすべての静的な値を定義します。すべての値の詳細な説明は、課金パラメータのプロパティ値に記載されています。 |
| include_target_soc | 間違い | リクエストメッセージにTargetSOC値を含めるかどうかを定義します。値がTrueに設定されている場合、コンポーネントに追加のターミナルが作成されます。 | |
| ターゲットエネルギー要求を含める | 真実 | このプロパティは、スケジュール制御モードを選択した場合に存在します。EVTargetEnergyRequest 値をリクエストメッセージに含めるかどうかを定義します。値がTrueに設定されている場合、コンポーネントに追加の端子が作成されます。 |
充電パラメータプロパティ値
充電パラメータは、EVの仕様と定格を定義するために使用されます。これらのパラメータは、 DC_ChargeParameterDiscoveryReq 、 ScheduleExchangeReq、DC_PreChargeReq、PowerDeliveryReq 、 CurrentDemandReqなど、さまざまなリクエストメッセージで使用されます。これらのパラメータにはオプションと必須があります。また、これらのパラメータの一部は、選択した制御モードとエネルギーサービスに応じて表に表示されます。定義は表3に記載されています。
Charge パラメータプロパティは、定義済みフィールドを持つ Python 辞書として定義されています。これらのフィールドはすべて、 value 、 exponent 、 include というフィールドを持つ辞書です。これらのフィールドの存在は、パラメータ自体と相関しています。パラメータがオプションの場合、 includeフィールドは必須です。パラメータがRationalNumber型の場合、 exponentは必須です。プロパティが静的な場合、 valueフィールドは必須です。
静的パラメータは、最大充電電力、最小充電電力、最大充電電流、最小充電電流など、充電プロセス中に変化しないパラメータです。一方、動的プロパティは充電プロセス中に値が変化します。動的プロパティには、目標SOC 、目標エネルギー要求、現在の電圧、目標電圧、目標電流があります。これらの値は、コンポーネントの入力端子によって指定されます。
RationalNumberは ISO 15118-20 規格で定義された特殊な型で、値と指数で構成されます。値はshort型(-32768 - 32767)で、指数はbyte 型(-3 - 3)です。実数値は以下の式で計算されます。
価値 * 10 ^ (指数)| パラメータ | 必須/任意 | タイプ | デフォルト値 | 説明 |
|---|---|---|---|---|
| 最大充電電力 | M | 有理数 0 - 200000 W |
|
EV がサポートする最大充電電力。 |
| 最小充電電力 | M | 有理数 0 - 200000 W |
|
EV に許容される最小充電電力。 |
| 最大充電電流 | M | 有理数 0~400A |
|
EV がサポートする最大充電電流。 |
| 最小充電電流 | M | 有理数 0~400A |
|
EV がサポートする最小充電電流。 |
| 最大電圧 | M | 有理数 0~1000V |
|
EV で許容される最大電圧。 |
| 最小電圧 | M | 有理数 0~1000V |
|
EV で許容される最小電圧。 |
| 最大エネルギー要求 | 動的 制御モード: M スケジュール制御モード: O |
有理数 0 - 200000Wh |
|
EV の最大許容エネルギー レベル。 |
| 最小エネルギー要求 | 動的 制御モード: M スケジュール制御モード: O |
有理数 0 - 200000Wh |
|
所有者が指定した最小 SOC を満たすために必要な EV のエネルギー要求。 |
| 最大v2xエネルギー要求 | お | 有理数 0 - 200000Wh |
|
現在のSOCがサイクリング活動専用範囲を離れるまでに充電可能な電力。負の値は、現在のSOCがV2X範囲を超えていることを示します。 |
| 最小v2xエネルギー要求 | お | 有理数 0 - 200000Wh |
|
PresentSOCがサイクリングアクティビティ専用範囲に入るまでに充電する必要がある電力。正の値は、PresentSOCがV2X範囲を下回っていることを示します。 |
| 出発時刻 | 動的 制御モード: M スケジュール制御モード: O |
符号なし整数 0 - 4294967295 |
|
この要素は、EV が充電プロセスを終了する予定であることを示すために使用されます。 |
| 最小SOC | お |
バイト 0~100 |
|
充電セッション全体を通じて EV が維持する必要がある最小充電状態。 |
| 最大サポートポイント | M | 符号なしショート 12 - 1024 |
|
ScheduleTupleのサブ要素の最大エントリ数を示します。これはPowerScheduleTypeとPriceRuleTypeのすべての要素に適用されます。SECCは、このパラメータで定義された最大エントリ数まで送信できます。 |
| ターゲット_soc | お |
バイト 0~100 |
|
EV がバッテリーが完全に充電されたと判断する SOC。 |
| ターゲットエネルギー要求 | 動的 制御モード: M スケジュール制御モード: O |
有理数 0 - 200000Wh |
|
所有者が指定した目標 SOC を満たすために必要な EV のエネルギー要求。 |
| 現在の電圧 | M | 有理数 |
|
EVの現在の電圧。 |
| ターゲット電圧 | M | 有理数 0~1000V |
|
EV が要求するターゲット電圧。 |
| ターゲット_現在 | 動的 制御モード: / スケジュール制御モード: M |
有理数 0~400A |
|
EVが要求する目標電流 |
| 最大放電電力 | DC エネルギーサービス: / DC BPTエネルギーサービス:M |
有理数 0 - 200000 W |
|
EVがサポートする最大放電電力。 |
| 最小放電電力 | DC エネルギーサービス: / DC BPTエネルギーサービス:M |
有理数 0 - 200000 W |
|
EV が許容する最小放電電力。 |
| 最大放電電流 | DC エネルギーサービス: / DC BPTエネルギーサービス:M |
有理数 0~400A |
|
EV がサポートする最大放電電流。 |
| 最小放電電流 | DC エネルギーサービス - / DC BPTエネルギーサービス:M |
有理数 0~400A |
|
EV で許容される最小放電電流。 |
入出力端子と状態値
信号処理信号は、端子を使用して ISO 15118-20 EVCC コンポーネントとの間でやり取りされます。
出力端子の値が「-1」の場合、その値はSECCが受信したメッセージでは使用されないことを示します。これは、メッセージ内のオプションパラメータに適用されます。
すべての値がすべての端末で正しく使用できるわけではありません。一部の値は整数値、一部の値は実数、一部の値は状態値を使用します。以下のリストは、各端末の使用方法を説明しています。
- PP - 近接パイロット (PP) 信号の電圧レベルを渡すのではなく、次のように定義される PP 状態を渡す必要があります。
- PP_STATE_ERROR = -1
- PP_STATE_DISCONNECTED = 0
- PP_STATE_CONNECTED = 1
- PP_STATE_DEPRESSED = 2
- CP - コントロール パイロット (CP) 信号の電圧レベルを渡すのではなく、次のように定義された CP 状態を渡す必要があります。
- CP_STATE_ERROR = -1
- CP_STATE_A = 0
- CP_STATE_B = 1
- CP_STATE_C = 2
- CP_STATE_D = 3
- EVPresentVoltage - 符号なし整数値として定義されます。
- EVTargetVoltage - 符号なし整数値として定義されます。
- EVTargetEnergyRequest - 符号なし整数値として定義されます。
- TargetSoC - 符号なし整数値として定義されます。
- EVTargetCurrent - 符号なし整数値として定義されます。
- SessionActive - 接続が確立されていない場合は 0、接続が確立されている場合は 1 と定義されます。
- EVSEReceivedMessage - 次のように定義されます:
- セッションセットアップ_RES = 0
- 認証セットアップ_RES = 1
- 承認_RES = 2
- サービス検出応答 = 3
- サービス詳細RES = 4
- サービス選択RES = 5
- DC_CHARGE_PARAMETER_DISCOVERY_RES = 6
- スケジュール交換頻度 = 7
- DC_ケーブルチェック_RES = 8
- DC_PRE_CHARGE_RES = 9
- パワーデリバリーレスポンス(開始)= 10
- DC_CHARGE_LOOP_RES = 11
- 電力供給抵抗(停止)= 12
- DC_溶接検出_RES = 13
- セッション停止回数 = 14
- EVSEResponseCode - SECCが受信したV2Gメッセージの確認応答ステータスを示します。以下の値を持つ状態として定義されます。
- OK = 0
- OK_CERT_EXPIRES_SOON = 1
- OK_NEW_SESSION_ESTABLISHED = 2
- OK_OLD_SESSION_JOINED = 3
- OK_POWER_TOLERANCE_CONFIRMED = 4
- WARN_AUTH_SELECTION_INVALID = 5
- WARN_CERT_EXPIRED = 6
- WARN_CERT_NOT_YET_VALID = 7
- WARN_CERT_REVOKED = 8
- WARN_CERT_VALIDATION_ERROR = 9
- WARN_CHALLENGE_INVALID = 10
- WARN_EIM_AUTH_FAILED = 11
- WARN_EMSP_UNKNOWN = 12
- 警告_EV_POWER_PROFILE_違反 = 13
- WARN_GENERAL_PNC_AUTH_ERROR = 14
- WARN_NO_CERT_AVAILABLE = 15
- WARN_NO_CONTRACT_MATCHING_PCID_FOUND = 16
- 警告_電力許容度_未確認 = 17
- WARN_SCHEDULE_RENEGOTIATION_FAILED = 18
- 警告_スタンバイ_許可されていません = 19
- 警告_WPT = 20
- 失敗 = 21
- 失敗_関連付け_エラー = 22
- 失敗_コンタクト_エラー = 23
- EVパワープロファイルが無効です = 24
- EVパワープロファイル違反失敗 = 25
- 計測署名が無効です = 26
- エネルギー転送サービスの選択に失敗しました = 27
- 失敗_サービス再交渉がサポートされていません = 28
- 一時停止に失敗しました = 29
- 電力供給失敗 = 30
- 失敗_電力許容度_未確認 = 31
- スケジュール再交渉失敗 = 32
- スケジュール選択が無効です = 33
- 失敗したシーケンスエラー = 34
- 失敗_サービス_ID_無効 = 35
- 失敗_サービス_選択_無効 = 36
- 署名エラー失敗 = 37
- 不明セッション失敗 = 38
- 失敗した間違った充電パラメータ = 39
- EVSEMaximumChargePower - 浮動小数点値として定義されます。
- EVSEMinimumChargePower - 浮動小数点値として定義されます。
- EVSEMaximumChargeCurrent - 浮動小数点値として定義されます。
- EVSEMinimumChargeCurrent - 浮動小数点値として定義されます。
- EVSEMaximumVoltage - 浮動小数点値として定義されます。
- EVSEMinimumVoltage - 浮動小数点値として定義されます。
- EVSEPowerRampLimitation - 浮動小数点値として定義されます。
- GoToPause - 0 または 1 として定義されます。
- EVSEMinimumSoC - 0 ~ 100 の範囲の符号なし整数値として定義されます。
- EVSETargetSoC - 0〜100 の範囲の符号なし整数値として定義されます。
- EVSEDepartureTime - 浮動小数点値として定義されます。
- EVSEPresentVoltage - 浮動小数点値として定義されます。
- EVSEPresentCurrent - 浮動小数点値として定義されます。
- EVSEPowerLimitAchieved - 0 または 1 として定義されます。
- EVSECurrentLimitAchieved - 0 または 1 として定義されます。
- EVSEVoltageLimitAchieved - 0 または 1 として定義されます。
- EVSENotificationMaxDelay - 浮動小数点値として定義されます。
- EVSENotification - 次のように定義されます:
- 一時停止 = 0
- 出口スタンバイ = 1
- 終了 = 2
- 計測確認 = 3
- サービス再交渉 = 5
- ChargedEnergyReadingWh - 符号なし整数値として定義されます。
- EVSEMaximumDiscahrgePower - 浮動小数点値として定義されます。
- EVSEMinimumDischargePower - 浮動小数点値として定義されます。
- EVSEMaximumDischargeCurrent - 浮動小数点値として定義されます。
- EVSEMinimumDischargeCurrent - 浮動小数点値として定義されます。
- BPT_DischargedEnergyReadingWh - 符号なし整数値として定義されます。
ISO 15118-20 EVCCコンポーネントの基本ロジック
ISO 15118-20 EVCCコンポーネントはプロトコルインターフェースのみを実装し、コントローラロジックは信号処理コンポーネントを用いて外部で定義されますが、それでも基本的なロジックは存在します。このロジックは、新しいセッションの開始タイミング、終了タイミング、およびいくつかの状態遷移を定義します。
シミュレーションが開始されると、コンポーネントは PP = PP_STATE_CONNECTED かつ CP = CP_STATE_B の場合にのみ新しい通信セッションを初期化します。
次のいずれかの条件が満たされた場合、コンポーネントはセッション停止メッセージを発行します: PP != PP_STATE_CONNECTED、CP = CP_STATE_ERROR、EVChargeComplete = True。
DC 充電時に、EV ターゲット電圧と EVSE 現在の電圧の差が、コンポーネント プロパティで定義されたプリチャージ電圧精度以下 (または等しい) になると、プリチャージから電流需要への移行が発生します。
ISO 15118-20プロトコルメッセージログ
ISO 15118-20 は、ログ メッセージに対して 3 つの異なるログ出力を提供します。
コンソール出力は、システムからのログメッセージをstdout(標準出力)に出力します。HILをシリアル通信でPCに接続し、SSHクライアントソフトウェア(例: PuTTY )を使用してコンソールを表示すると、標準出力に表示されるメッセージを確認できます。
ファイル出力は、システムからのログメッセージをテキストファイル「iso15118.log」に出力します。プログラム終了後、このファイルはHIL上のパス「/mnt/ext_files/iso15118_20/iso15118.log」で確認できます。このテキストファイルにアクセスする方法の一つは、 WinSCPソフトウェアを使用することです。
UDP出力は、システムからのログメッセージをUDPブロードキャストポートに送信します。メッセージを受信するには、スケマティックエディタのモデルをコンパイルしてHIL SCADAで実行する前に、コンピュータのターミナルからスクリプト「\examples\models\communication protocols\iso 15118\electric vehiclecharge controller\udp log receive.py」を実行する必要があります。メッセージの読み取りを可能にするには、HILとコンピュータが同じブロードキャストアドレス上にある必要があります(同じサブネット上にあり、イーサネット接続でネットワーク接続されている必要があります)。メッセージは、HILデバイスと同じブロードキャストアドレスに接続された複数の異なるコンピュータで読み取ることができます。
仮想HILサポート
Virtual HILは現在このプロトコルをサポートしていません。非リアルタイム環境(例:ローカルコンピュータでモデルを実行する場合)を使用する場合、このコンポーネントへの入力は破棄され、このコンポーネントからの出力はゼロになります。
参考文献
- 国際標準化機構(ISO)、「ISO 15118、道路車両 - 車両とグリッド間の通信インターフェース - パート1:一般情報およびユースケース定義」、2013年、1~45ページ
- 国際標準化機構(ISO)、「ISO 15118、道路車両 - 車両とグリッド間の通信インターフェース - パート20:第2世代ネットワーク層およびアプリケーション層の要件」、2022年、138~240ページ
- 国際電気標準会議(IEC)、「IEC 61851、電気自動車導電性充電システム - パート23:DC電気自動車充電ステーション」、2014年