ISO 15118-2プロトコル
Typhoon HIL ツールチェーンにおける ISO 15118-2 プロトコルの実装の説明。
IEC 61851規格
ISO 15118-2プロトコルを理解するには、まずこのプロトコルの使用法を定義するIEC 61851規格について触れることが重要です。このセクションでは、この規格とISO 15118-2がどのように関連しているかについて説明します。
IEC 61851 - 電気自動車導電性充電システム[ 1 ]規格は、最大1000Vの標準AC供給電圧および最大1500VのDC電圧で電気自動車を充電するための車載機器とオフボード機器の特性を定義しています。
- 充電モード1 - AC充電。標準の単相/三相コンセントを介してEVを主電源に接続します。最大16A、250/480V。充電ケーブルに保護装置は内蔵されていません。
- 充電モード2 - AC充電。標準の単相/三相コンセントを介してEVを主電源に接続します。最大32A、250/480V。充電ケーブルに保護装置が内蔵されています。
- 充電モード3 - 専用AC充電ステーションを使用したAC充電。必須のPWM信号とオプションの高レベル通信(HLC)
- 充電モード4 - 専用DC充電ステーションを使用したDC充電。PWM信号と高レベル通信(HLC)が必須
- システム A - 物理/データ層は CAN バス A インターフェイスを経由し、アプリケーション層は IEC 61851-24 規格で定義されます。
- システム B - 物理/データ層は CAN バス B インターフェイスを経由し、アプリケーション層は GB/T 27930 標準によって定義されます。
- システム C - 物理層/データ層は電力線通信 (PLC) を介して行われ、アプリケーション層は ISO 15118-2 プロトコルによって定義されます。
言い換えれば、ISO 15118-2 プロトコルは、システム C が適用される場合の DC 充電モードの EV と EVSE 間のデジタル通信層を定義する役割を担っています。
ISO 15118-2プロトコル
ISO 15118-2(道路車両 - 車両・系統間通信インターフェース)[ 3 ]は、バッテリー電気自動車およびプラグインハイブリッド電気自動車を含む電気自動車(EV)と電気自動車給電装置(EVSE)間のデジタル通信プロトコルを規定しています。この汎用機器の通信部品は電気自動車通信コントローラ(EVCC)と給電装置通信コントローラ(SECC)であるため、ISO 15118-2はこれらのコンポーネント間の通信について規定しています。
ISO 15118-2は電気自動車の充電を対象としていますが、他の車両にも適用可能です。コンバインド充電システム(CCS)の一部として、ISO 15118-2は有線(ACおよびDC)およびワイヤレス充電アプリケーションをカバーし、EVをスマートグリッド(V2G - Vehicle-to-Grid)に統合することを可能にします。
ISO 15118-2は、EVと充電ステーションが動的に情報交換を行い、適切な充電スケジュールを(再)交渉することを可能にします。スマート充電アプリケーションは、電力網の状態、各EVのエネルギー需要、そして各ドライバーの移動ニーズ(出発時刻と走行距離)に関する情報を用いて、各EVの個別の充電スケジュールを計算します。これにより、各充電セッションにおいて、電力網の容量と同時充電中のEVの電力需要が完璧に一致します。
ISO 15118-2には、「プラグ&チャージ」と呼ばれる機能も搭載されています。プラグ&チャージは、複数の暗号化メカニズムを導入することで通信を保護し、交換されるすべてのデータの機密性、整合性、および真正性を保証します。これは、トランスポートラインセキュリティ(TLS)プロトコルを使用することで実現されます。
- 暗号化、署名、キー管理などのセキュリティ コンセプト。
- 堅牢なPLCベースの通信
- 自動アドレス割り当てと関連付け
- IPv6ベースの通信
- 圧縮されたXMLメッセージ
- クライアントサーバーアプローチ
- ケーブルチェック、溶接検出などの安全コンセプト
- 付加価値サービスの拡張コンセプト
プロトコルによれば、EVの充電プロセスは表1に示すように8つの機能グループに分かれている[ 3 ]。
| グループ | 関数 | 説明 |
|---|---|---|
| あ | 充電プロセスの開始 | 車両を物理的に接続した後、車両とEVSE間のプロセスを開始します。PWMや高レベル通信の可用性など、進行中の充電プロセスの基礎を設定します。 |
| B | 通信設定 | EVCCとSECC間の関連性と関連する接続を確立します |
| C | 認証処理 | 証明書に関連するすべての通信 |
| D | 識別と認可 | 識別と認証の方法 |
| E | 目標設定と課金スケジュール | 充電プロセスと充電を開始するためにEVだけでなくSECCと二次アクターから必要な情報 |
| F | 充電制御と再スケジュール | 充電プロセス中に要素を制御するコマンド |
| G | 付加価値サービス | 電気自動車の充電に直接必要ではない追加要素 |
| H | 請求終了プロセス | 充電プロセスの終了を知らせるトリガー |
ISO 15118-2 DC充電セッションのメッセージシーケンス
ISO 15118-2 [ 4 ] に従って実行されるDC充電セッションの充電プロセスを図1に示します。メッセージの送受信や接触器の開閉などの特定のアクションを実行するエンティティは、上部のボックスに示されています。状態A、B、およびCは、充電ステーションによって測定された特定の電圧レベルに関連しており、IEC 61851で定義されています。ISO 15118-2はIEC 61851を基に拡張し、EVCCとSECC間のデジタル通信を可能にします。これは、IEC 61851 [ 2 ] で定義されているように、パルス幅変調(PWM)信号のデューティサイクルが5%に設定されるとすぐに開始されます。
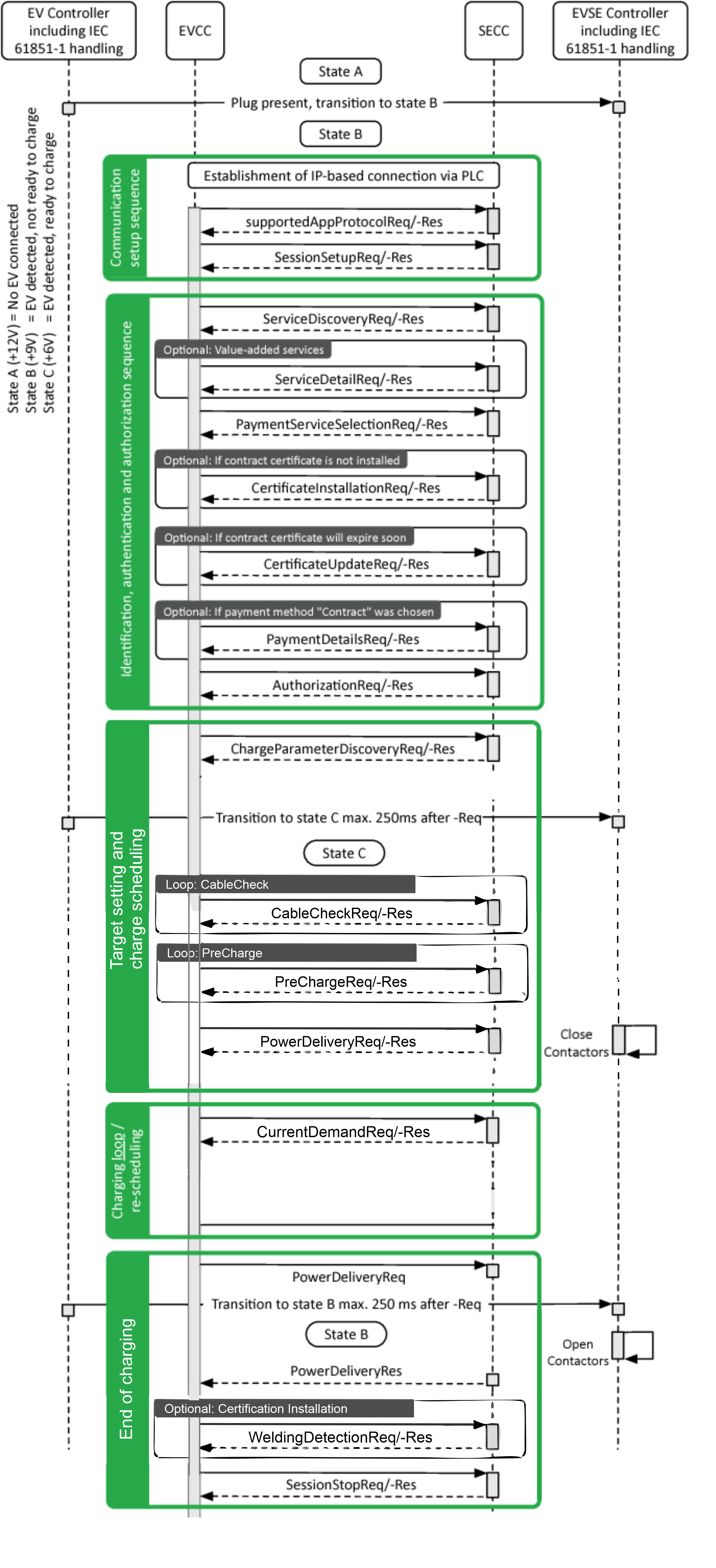
- 通信セットアップシーケンス:
- サポートされているAppProtocolRequest :EVと充電ステーションは、このリクエスト・レスポンスメッセージのペアを使用してプロトコルバージョンを合意します。この移行フェーズでは、EVと充電ステーションの両方が同じバージョンのISO 15118-2に対応していることが重要です。互換性がない場合、ISO 15118-2準拠の充電セッションを開始することはできません。
- SessionSetupRequest : 通信セッションに一意のセッションIDを割り当てるために使用されます。セッションは一時停止し、後で同じセッションIDを使用して再開できます。この場合、ドライバーが当初意図したとおりに充電が継続されるように、以前に合意した課金パラメータが再度適用されます。
- 識別、認証、承認のシーケンス:
- ServiceDiscovery :EVは充電ステーションに提供サービスに関する情報を要求します。これらのサービスには、AC単相充電またはAC三相充電、DC充電のバリエーション、利用可能な識別メカニズム(外部識別手段(EIM)またはプラグ&チャージ)、そして追加データをダウンロードするためのインターネットアクセスなどのオプションの付加価値サービスが含まれます。EVは、オプションのServiceDetailRequestメッセージを使用して、各サービスの詳細を要求できます。
- PaymentServiceSelection : 識別メカニズム、充電モード、および使用するオプションの付加価値サービスが明確になると、EV は PaymentServiceSelectionRequest を使用して充電ステーションに通知します。
- CertificateInstallation :EVが識別方法としてプラグ&チャージを選択した場合、充電ステーションがドライバーを自動的に認証・承認するために、有効なデジタル契約証明書をインストールする必要があります。EVにこの証明書がまだインストールされていない場合、または既存の契約証明書の有効期限が切れている場合は、EVはCertificateInstallationメッセージペアを使用して、充電ステーションから新しい契約証明書をインストールできます。
- CertificateUpdate : EV にプラグ アンド チャージ用の期限切れが近づいている契約証明書がインストールされている場合、EV は CertificateUpdate メッセージ ペアを開始して新しい契約証明書を受信するようにプログラムできます。
- PaymentDetails :EVが識別方法としてプラグ&チャージを選択するようにプログラムされている場合、EVは充電ステーションに契約証明書を提示し、ドライバーの認証と充電許可を得る必要があります。これはPaymentDetailsRequestメッセージを使用して行われます。
- 認可:認可メッセージペアは、リプレイ攻撃を回避するために使用されます。リプレイ攻撃とは、有効なデータ送信を悪意を持って、または不正に繰り返して、制限されたリソースへのアクセスを取得するネットワーク攻撃の一種です。
- 目標設定と料金スケジュール:
- ChargeParameterDiscovery :EVと充電ステーションは、最大および最小の許容電圧レベルとアンペア数を伝えることで、それぞれの技術的な充電制限を相互に交換します。EVはまた、必要なエネルギー量とドライバーが指定した出発予定時刻を充電ステーションに通知します。その後、SECCはEVに提案する充電スケジュールを計算します。提案されるスケジュールには、EVが充電ステーションに接続されている間に充電できる最大電力と、オプションのSalesTariffが含まれます。SalesTariffには、時間経過に伴うコスト、電力需要とエネルギー量に関連するコスト、またはこれらの組み合わせに関する情報を提供するスケジュールが含まれており、EVが特定の充電行動をとるように促すことを目的とします。
- CableCheck :安全なDC充電のために、ケーブルチェックを実行する必要があります。CableCheckReqはEVSEのケーブルチェックステータスを問い合わせ、例えばEV側のコネクタがロックされているか、EVが充電準備ができているかなどをEVSEに伝えます。SECCはCableCheckReqを受信すると、ケーブルチェックとEVSEのステータス情報を含むCableCheckResを送信します。
- プリチャージ:プリチャージは、EVSEの出力電圧をEVバッテリー電圧に調整するために使用されます。EVは、要求されるDC電流(最大突入電流)とDC電圧の両方を含むプリチャージ要求を送信します。SECCはPreChargeReqを受信すると、EVSEの状態と現在のEVSE出力電圧をEVに通知するPreChargeResを送信します。
- PowerDelivery :Power Deliveryメッセージ交換は、EVSEが出力コンセントに電圧を供給し、EVがバッテリーの充電を開始できる時点を示します。DC電源から電力伝送準備完了のフィードバックが返されると、EVはDC電流要求を設定し、電力伝送フェーズを開始します。EVCCはPowerDeliveryReqを送信することで、SECCに電力供給を要求し、充電プロセス中に従うChargingProfileを送信します。PowerDeliveryReqメッセージを受信したSECCは、電力が利用可能かどうかの情報を含むPowerDeliveryResメッセージを送信します。
- 充電ループ/再スケジュール:
- CurrentDemand :DC充電制御には、EV側からの要求電流の周期的なやり取りが必要です。また、目標電圧と電流・電圧差も伝送されます。EVはCurrentDemandReqを送信することで、EVSEに一定の電流を要求します。CurrentDemandReqを受信すると、SECCはCurrentDemandResを送信し、EVSEの状態と現在の出力電圧・電流をEVに通知します。これで充電ループが構築されます。
- 充電終了:
- PowerDelivery :EVが計算された充電スケジュールに基づいて充電セッションを一時停止または終了しようとすると、ChargeProgressパラメータをStopに設定した別のPowerDeliveryRequestメッセージを送信します。EVバッテリーが充電完了SoCに達すると、充電セッションは停止されます。
- WeldingDetection : 溶接検出メッセージは、IEC 61851 に準拠した溶接検出メカニズムの実装を可能にします。これは、EV コンタクタの溶接を防止するために使用されます。
- SessionStop :通信はSessionStopReq/-Resメッセージペアで終了します。ChargingSessionパラメータはTerminateまたはPauseに設定できます。充電セッションを一時停止する場合、合意された充電スケジュールなどの特定のパラメータは充電ステーションによって一時的に保存され、充電再開時にこれらの値が適用されます。
ISO 15118-2 AC充電セッションのメッセージシーケンス
ISO 15118-2 [ 4 ] に従って実行されるAC充電セッションの充電プロセスを図2に示します。メッセージの送受信や接触器の開閉などの特定のアクションを実行するエンティティは、上部のボックスに示されています。状態A、B、およびCは、充電ステーションによって測定された特定の電圧レベルに関連しており、IEC 61851で定義されています。ISO 15118-2はIEC 61851を基に拡張し、EVCCとSECC間のデジタル通信を可能にします。これは、IEC 61851 [ 2 ] で定義されているように、パルス幅変調(PWM)信号のデューティサイクルが5%に設定されるとすぐに開始されます。
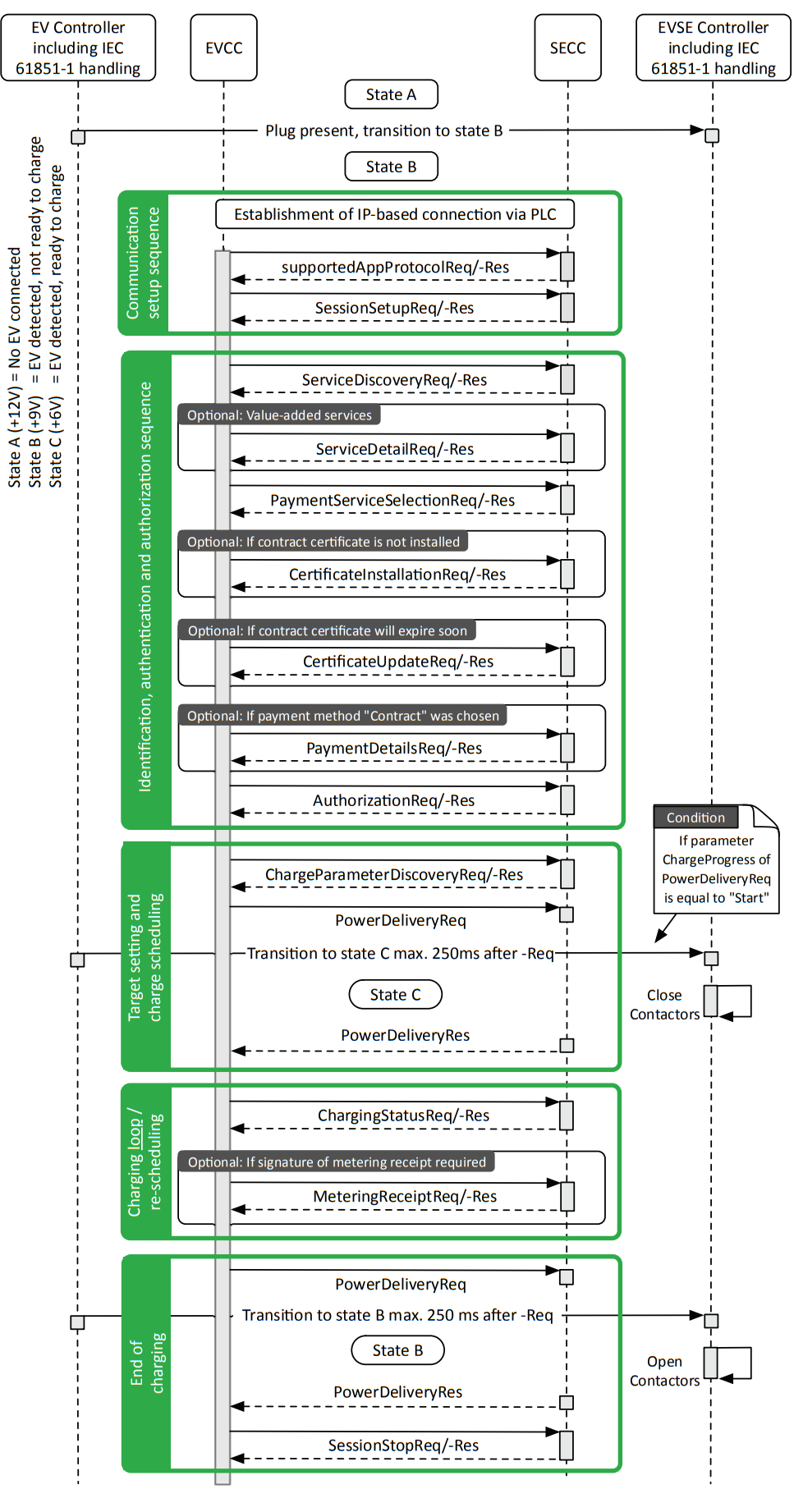
- 通信セットアップシーケンス:
- サポートされているAppProtocol :EVと充電ステーションは、このリクエスト・レスポンス・メッセージのペアを使用してプロトコルバージョンを合意します。この移行フェーズでは、EVと充電ステーションの両方が同じバージョンのISO 15118-2に対応していることが重要です。互換性がない場合、ISO 15118-2準拠の充電セッションを開始することはできません。
- SessionSetup : 通信セッションに一意のセッションIDを割り当てるために使用されます。セッションは一時停止し、後で同じセッションIDを使用して再開できます。この場合、ドライバーが当初意図したとおりに充電が継続されるように、以前に合意した課金パラメータが再度適用されます。
- 識別、認証、承認のシーケンス:
- ServiceDiscovery :EVは充電ステーションに提供サービスに関する情報を要求します。これらのサービスには、AC単相充電またはAC三相充電、DC充電のバリエーション、利用可能な識別メカニズム(外部識別手段(EIM)またはプラグ&チャージ)、そして追加データをダウンロードするためのインターネットアクセスなどのオプションの付加価値サービスが含まれます。EVは、オプションのServiceDetailRequestメッセージを使用して、各サービスの詳細を要求できます。
- PaymentServiceSelection : 識別メカニズム、充電モード、および使用するオプションの付加価値サービスが明確になると、EV は PaymentServiceSelectionRequest を使用して充電ステーションに通知します。
- CertificateInstallation :EVが識別方法としてプラグ&チャージを選択した場合、充電ステーションがドライバーを自動的に認証・承認するために、有効なデジタル契約証明書をインストールする必要があります。EVにこの証明書がまだインストールされていない場合、または既存の契約証明書の有効期限が切れている場合は、EVはCertificateInstallationメッセージペアを使用して、充電ステーションから新しい契約証明書をインストールできます。
- CertificateUpdate : EV にプラグ アンド チャージ用の期限切れが近づいている契約証明書がインストールされている場合、EV は CertificateUpdate メッセージ ペアを開始して新しい契約証明書を受信するようにプログラムできます。
- PaymentDetails :EVが識別方法としてプラグ&チャージを選択するようにプログラムされている場合、EVは充電ステーションに契約証明書を提示し、ドライバーの認証と充電許可を得る必要があります。これはPaymentDetailsRequestメッセージを使用して行われます。
- 認可:認可メッセージペアは、リプレイ攻撃を回避するために使用されます。リプレイ攻撃とは、有効なデータ送信を悪意を持って、または不正に繰り返して、制限されたリソースへのアクセスを取得するネットワーク攻撃の一種です。
- 目標設定と料金スケジュール:
- ChargeParameterDiscovery :EVと充電ステーションは、最大および最小の許容電圧レベルとアンペア数を伝えることで、それぞれの技術的な充電制限を相互に交換します。EVはまた、必要なエネルギー量とドライバーが指定した出発予定時刻を充電ステーションに通知します。その後、SECCはEVに提案する充電スケジュールを計算します。提案されるスケジュールには、EVが充電ステーションに接続されている間に充電できる最大電力と、オプションのSalesTariffが含まれます。SalesTariffには、時間経過に伴うコスト、電力需要とエネルギー量に関連するコスト、またはこれらの組み合わせに関する情報を提供するスケジュールが含まれており、EVが特定の充電行動をとるように促すことを目的とします。
- PowerDelivery :Power Deliveryメッセージ交換は、EVSEが出力コンセントに電圧を供給し、EVがバッテリーの充電を開始できる時点を示します。AC電源から電力伝送準備完了のフィードバックが返されると、EVはA0C電流要求を設定し、電力伝送フェーズを開始します。EVCCはPowerDeliveryReqを送信することで、SECCに電力供給を要求し、EVCCが充電プロセス中に従うChargingProfileを送信します。PowerDeliveryReqメッセージを受信したSECCは、電力が利用可能かどうかの情報を含むPowerDeliveryResメッセージを送信します。
- 充電ループ/再スケジュール:
- ChargingStatus :充電ステータスメッセージペアは、SECCから提供されるメーター測定値の妥当性チェックを提供します。EVは、繰り返し交換される充電ステータスメッセージに基づいて、EVSEから供給される電力を確認し、検証することができます。また、SECCはメーター受領メッセージペアを使用して、ChargingStatusResメッセージに含まれるメーター情報レコードへの署名をEVCCに要求することができます。
- MeteringReceipt :MeteringReceiptReqメッセージが送信されると、EVCCは、SECCによる要求の受信前に、ChargingStatusResメッセージにMeterInfoレコード、SessionID、およびSAScheduleTupleIDのデータ要素が含まれていることを確認します。この確認は、MeteringReceiptReqメッセージのメッセージ本文に署名を適用することで実装されます。EVCCによって適用される署名は、EVCCが、この充電セッションに選択された現在適用されている充電契約証明書と共に、この要求の前にCharging Status Resメッセージに含まれるMeterInfoレコード、SessionID、およびSAScheduleTupleIDのデータ要素を受信したことを確認することのみを目的としています。これは、以前のMeterInfoレコードに示されたエネルギー量が課金の文脈において正しいことを確認するためのものではありません。
- 充電終了:
- PowerDelivery :EVが計算された充電スケジュールに基づいて充電セッションを一時停止または終了しようとすると、ChargeProgressパラメータをStopに設定した別のPowerDeliveryRequestメッセージを送信します。EVバッテリーが充電完了SoCに達すると、充電セッションは停止されます。
- SessionStop :通信はSessionStopReq/-Resメッセージペアで終了します。ChargingSessionパラメータはTerminateまたはPauseに設定できます。充電セッションを一時停止する場合、合意された充電スケジュールなどの特定のパラメータは充電ステーションによって一時的に保存され、充電再開時にこれらの値が適用されます。
Typhoon HILツールチェーンにおけるISO 15118-2プロトコルの実装
IEC 61851では、EVCCとSECCはISO 15118-2に準拠した電力線通信(PLC)を介して通信すると定義されていますが、プロトコル自体はEthernetベースであり、Typhoon HILツールチェーンに実装されています。Typhoon HILデバイス( HIL402、HIL101、HIL404、HIL602+、HIL604、HIL506、HIL606)でサポートされています。EthernetをPLCに変換するには、 Green Phyモジュールなどの追加モデムを使用できます。
電気自動車側の通信は、回路図エディター ライブラリの Communication → EV charging → ISO 15118 フォルダーにある ISO 15118-2 EVCC コンポーネントを使用して実装されます。
通信の供給機器側は、回路図エディター ライブラリの Communication → EV charging → ISO 15118 フォルダーにある ISO 15118-2 SECC コンポーネントを使用して実装されます。
| 分野 | 価値 |
|---|---|
| プロトコル名前空間 | 名前空間: uru:iso:15118:2:2013:MsgDef |
| バージョン番号メジャー | 2 |
| バージョン番号マイナー | 0 |
| スキーマID | 10 |
| 優先度 | 1 |
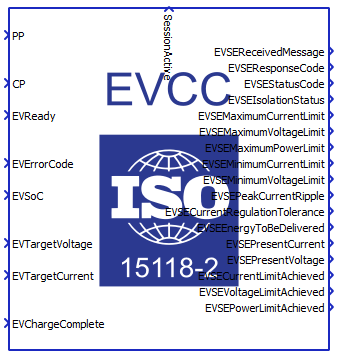
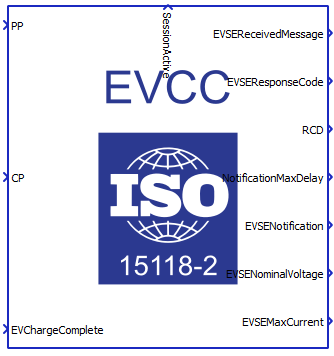
ISO 15118-2 EVCCコンポーネント
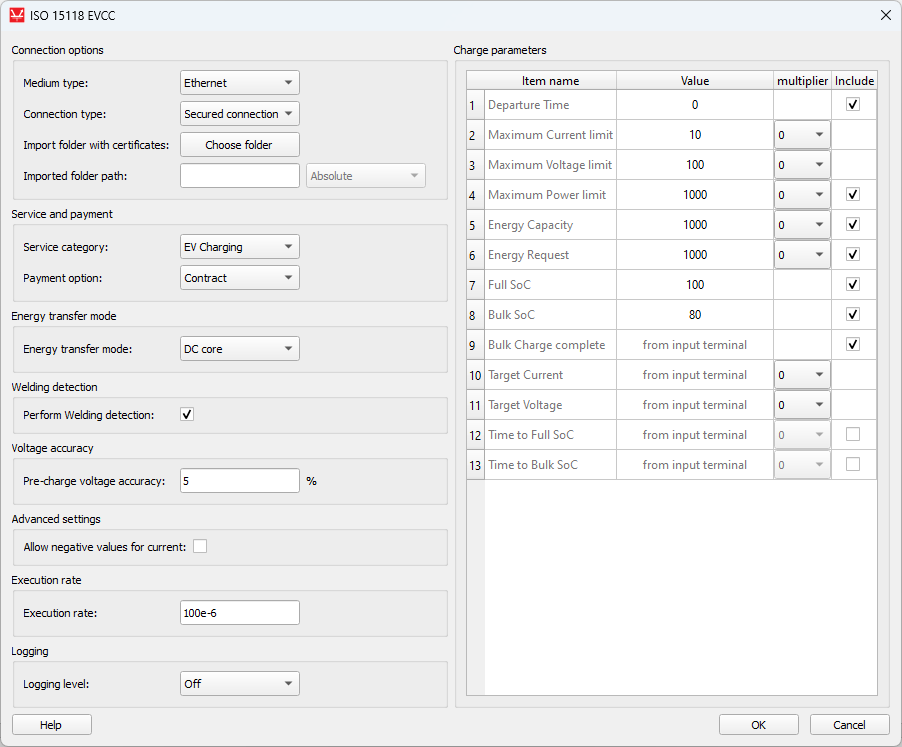
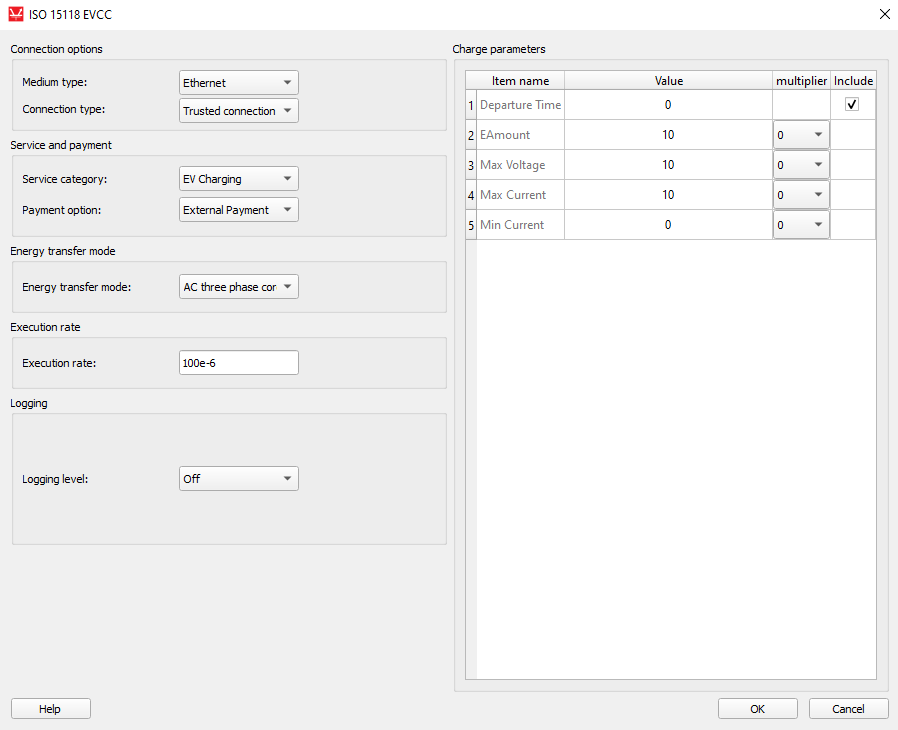
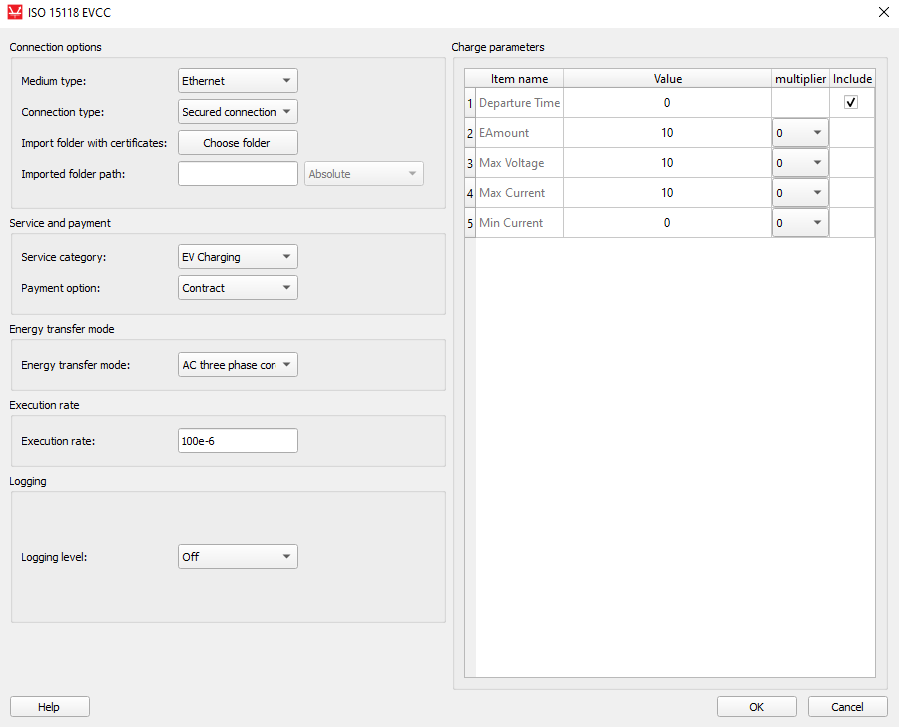
ISO 15118-2 EVCCコンポーネントは、プロトコルのEV側を実装します。このコンポーネントは通信インターフェースのみを実装し、コントローラ自体は実装しないことを明記することが重要です。つまり、このコンポーネントはEVCCとSECC間で必要なメッセージを中継するためだけに使用されます。コントローラ(またはロジック)部分は、ユーザーが信号処理コンポーネントを使用して実装する必要があります。
ISO 15118-2 EVCCコンポーネントを表3に示します。
| 成分 | コンポーネントダイアログウィンドウ | プロパティ |
|---|---|---|
 |
  |
|
 |
  |
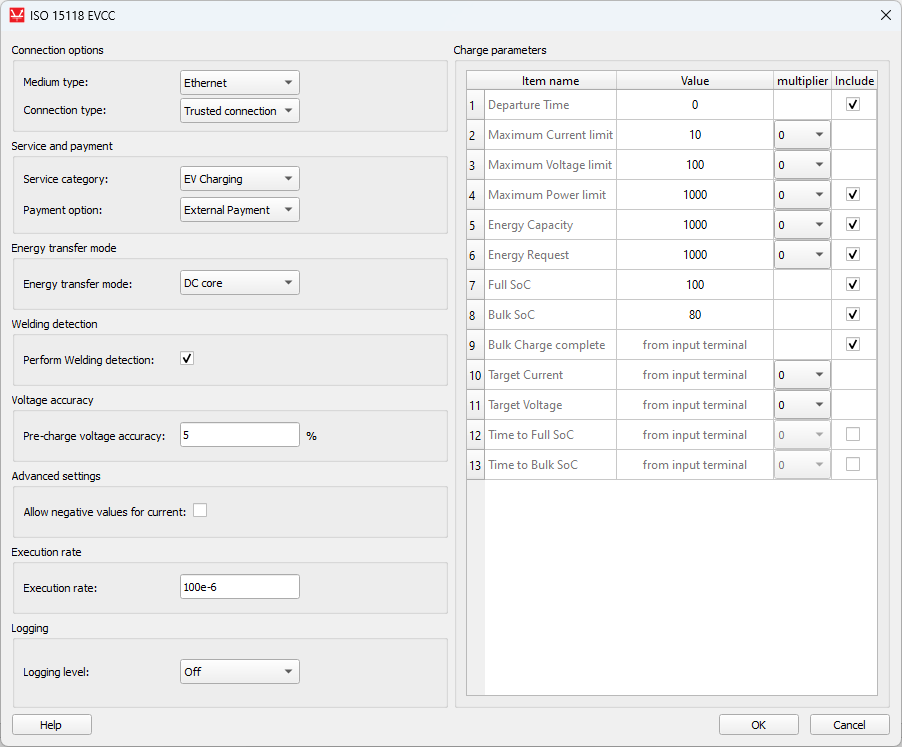
コンポーネントパラメータについては表4で説明されている。
| 名前 | 物件名 | デフォルト値 | 説明 |
|---|---|---|---|
| 接続タイプ | 接続タイプ | 信頼できる接続 | EV と EVSE 間の接続タイプを定義します。信頼できる接続(TCP プロトコルを使用)と安全な接続(TLS を使用)が利用可能です。 |
| 中型タイプ | 中型 | イーサネット | SECCとEVCCが通信する媒体の種類を選択します。EthernetとPLCの媒体タイプが利用可能です。 |
| サービスカテゴリ | サービスカテゴリ | EV充電 | EVで利用予定のサービスカテゴリーを選択してください。現在、利用可能なバリューサービスはEV充電のみです。 |
| 支払い方法 | 支払いオプション | 外部支払い | EV が使用する予定の支払いオプションを選択します。 外部支払い そして 契約 お支払いオプションをご利用いただけます。 契約支払いオプションは、セキュア接続接続タイプを選択した場合にのみ使用できますが、外部支払い支払いオプションは、両方の接続タイプオプションで使用できます。 |
| 証明書を含むフォルダをインポートする | フォルダ選択ボタン | 間違い | 必要な通信を確立するために EVCC にインポートされる SECC からの必要な証明書が含まれるフォルダーに移動します。 万が一、 安全な接続 接続タイプと 外部支払い
支払いオプションを選択した場合、必要な証明書は次のとおりです。
万が一、 安全な接続 接続タイプと 契約 支払いオプションを選択した場合、必要な証明書は次のとおりです。
|
| インポートされたフォルダのパス | フォルダパス | 「」 | 選択したフォルダーのファイルパスを表示します。 |
| パスタイプ | パスタイプ | 絶対 | 選択した値に応じて、フォルダーへのパスは絶対または相対になります。 |
| エネルギー伝達モード | エネルギー伝達モード | DCコア | EV が想定するエネルギー転送モードを選択します。DC およびACエネルギー転送モードが利用可能です。 |
| 溶接検出を実行する | 溶接検出リクエストを含める | 真実 | 溶接検出要求メッセージを通信セッションに含めるかどうかを選択します。 |
| プリチャージ電圧精度 | プリチャージ電圧精度 | 5 | IEC 61851規格では、突入電流を防止するため、EV側のメイン充電コンタクタは、EVSE出力電圧とバッテリー電圧の間に大きなオフセットがない場合にのみ閉じることができます。このオフセットは、充電前電圧精度によって定義されます。 |
| 電流に負の値を許可する | 現在の負の値を許可する | 間違い | 負の電流値を有効または無効にします。負の電流値はISO 15118-2プロトコルに準拠していませんが、このオプションはカスタム機能として追加されています。 |
| 充電パラメータDC | 充電パラメータDC |
{
"departure_time": {"value": 0,
"include": True},
"maximum_current_limit": {"value": 10,
"multiplier": 0},
"maximum_voltage_limit": {"value": 100,
"multiplier": 0},
"maximum_power_limit": {"value": 1000,
"multiplier": 0,
"include": True},
"energy_capacity": {"value": 1000,
"multiplier": 0,
"include": False},
"energy_request": {"value": 1000,
"multiplier": 0,
"include": False},
"full_soc": {"value": 100,
"include": True},
"bulk_soc": {"value": 80,
"include": True},
"target_voltage": {"multiplier": 0},
"target_current": {"multiplier": 0},
"time_to_full_soc": {"multiplier": 0},
"time_to_bulk_soc": {"multiplier": 0}
}
|
課金パラメータDCは、 EVリクエストを記述するすべての静的値を定義します。すべての値の詳細な説明は、課金パラメータプロパティ値に記載されています。 |
| 充電パラメータAC | 充電パラメータAC |
|
課金パラメータACは、 EVリクエストを記述するすべての静的値を定義します。すべての値の詳細な説明は、課金パラメータのプロパティ値に記載されています。 |
| 実行率 | 実行率 | 100e-6 | ISO 15118-2 EVCCコンポーネントの実行率 |
| ログレベル | ログレベル | オフ | ISO 15118-2 EVCCコンポーネントのログ出力優先度。選択可能なオプションは、オフ、情報、デバッグ、警告、エラーです。選択内容に応じて、そのランク以上のメッセージが表示されます。 |
| ログ出力 | ログ出力 | コンソール | ログ出力は、ログ メッセージが表示される場所を指定します。 |
| UDPポート | udp_port_edit | 65000 | 出力のログにUDPを選択した場合、メッセージはUDPブロードキャストネットワーク上に表示されます。UDPポートは、ログメッセージが表示されるポートを指定します。 |
| 一括請求完了を含める | 間違い | EVCCの電流需要メッセージにバルク充電完了値を表示するかどうかを定義します。値がTrueに設定されている場合、コンポーネントに追加の端子が作成されます。 | |
| 完全なSOCまでの時間を含める | 間違い | EVCCの電流需要メッセージに、 SoCが満充電になるまでの残り時間の値を表示するかどうかを定義します。この値がTrueに設定されている場合、コンポーネントに追加の端子が作成されます。 | |
| バルクSOCまでの時間を含める | 間違い | EVCCの電流需要メッセージに、 SoCバルクまでの残り時間の値を表示するかどうかを定義します。この値がTrueに設定されている場合、コンポーネントに追加の端子が作成されます。 |
充電パラメータプロパティ値
充電パラメータは、EVの仕様と定格を定義するために使用されます。これらのパラメータは、DC充電を選択した場合はChargeParameterDiscoveryReq 、 PowerDeliveryReq 、 PreChargeReq 、 CurrentDemandReq 、AC充電を選択した場合はChargeParameterDiscoveryReq 、 PowerDeliveryReq 、 ChargingStatusReqなど、様々なリクエストメッセージで使用されます。これらのパラメータにはオプションと必須があります。定義は表5に記載されています。
Chargeパラメータプロパティは、定義済みフィールドを持つPython辞書として定義されています。これらのフィールドはすべて、 value 、 multiplier 、 include というフィールドを持つ辞書です。これらのフィールドの存在は、パラメータ自体と相関しています。パラメータがオプションの場合、 includeフィールドは必須です。パラメータがPhysicalValue型の場合、 multiplierは必須です。プロパティが静的な場合、 valueフィールドは必須です。
静的パラメータは、充電プロセス中に変化しないパラメータです。例えば、DC充電を選択した場合は最大電流制限、最大電圧制限、フルSoC 、AC充電を選択した場合はEAmount 、最大電圧、最大電流、最小電流などが挙げられます。一方、動的プロパティは、充電プロセス全体を通して値が変化します。動的プロパティとは、DC充電を選択した場合のターゲット電圧、ターゲット電流、フルSoCまでの時間、バルクSoCまでの時間です。これらの値は、コンポーネントの入力端子によって指定されます。
PhysicalValue はISO 15118 規格で定義された特定の型であり、 value 、 multiplier 、 unitから構成されます。 valueはshort型(-32768 - 32767)、 multiplier はbyte 型(-3 - 3)です。実数値は以下の式で計算されます。
値* 10 ^ (乗数)
| パラメータ | 必須/任意 | タイプ | デフォルト値 | 説明 |
|---|---|---|---|---|
| 出発時刻 | お |
符号なし整数 0 - 4294967295 |
{
"value": 0,
"include": False
}
|
車両が充電プロセスを完了する予定のタイミングを示すために使用されます。この値により、EVSEは充電戦略を定義できます。値が0の場合、EVは充電プロセスを直ちに開始することを示します。 |
| 最大電流制限 | M |
物理的価値 0~400A |
{
"value": 10,
"multiplier": 0
}
|
EV がサポートする最大電流。 |
| 最大電圧制限 | M |
物理的価値 0~1000V |
{
"value": 100,
"multiplier": 0
}
|
EV がサポートする最大電圧。 |
| 最大電力制限 | お |
物理的価値 0 - 200000 W |
{
"value": 1000,
"multiplier": 0,
"include": True
}
|
EVがサポートする最大電力。 |
| エネルギー容量 | お |
物理的価値 0 - 200000Wh |
{
"value": 1000,
"multiplier": 0,
"include": False
}
|
EVのエネルギー容量。 |
| エネルギー要求 | お |
物理的価値 0 - 200000Wh |
{
"value": 1000,
"multiplier": 0,
"include": False
}
|
EV が EVSE に要求するエネルギー量。 |
| フルソック | お |
バイト 0~100 |
{
"value": 100,
"include": True
}
|
EV がバッテリーが完全に充電されたと判断する SoC。 |
| バルク_soc | お |
バイト 0~100 |
{
"value": 80,
"include": True
}
|
EV が急速充電プロセスを終了すると判断する SoC。 |
| ターゲット電圧 | M |
物理的価値 0~1000V |
{
"multiplier": 0
}
|
EV が EVSE に要求する電圧。 |
| ターゲット_現在 | M |
物理的価値 0~1000V |
{
"multiplier": 0
}
|
EV が EVSE に要求する電流。 |
| 完全なSOCまでの時間 | お |
物理的価値 0 - 172800秒 |
{
"multiplier": 0,
"include": False
}
|
バッテリーがフル SoC に達するまでの計算時間。 |
| バルク化までの時間 | お |
物理的価値 0 - 172800秒 |
{
"multiplier": 0,
"include": False
}
|
バッテリーがバルク SoC に達するまでの計算時間。 |
| 金額 | M |
物理的価値 0 - 200000Wh |
|
現在の充電セッションでユーザーが設定した充電目標を達成するために必要なエネルギー量を EV が推定したことを反映するエネルギー量。 |
| 最大電圧 | M |
物理的価値 0~1000V |
|
車両が受け入れ可能な最大公称電圧の RMS。 |
| 最大電流 | M |
物理的価値 0~400A |
|
各相の EV でサポートされる最大電流。 |
| 最小電流 | M |
物理的価値 0~400A |
|
この最小値を下回る充電は EV にとってエネルギー/コスト効率が良くないことを SECC に通知するために使用されます。 |
入出力端子と状態値
信号処理信号は、端子を使用して ISO 15118-2 EVCC コンポーネントとの間でやり取りされます。
- PP - 近接パイロット (PP) 信号の電圧レベルを渡すのではなく、次のように定義される PP 状態を渡す必要があります。
- PP_STATE_ERROR = -1
- PP_STATE_DISCONNECTED = 0
- PP_STATE_CONNECTED = 1
- PP_STATE_DEPRESSED = 2
- CP - コントロール パイロット (CP) 信号の電圧レベルを渡すのではなく、次のように定義された CP 状態を渡す必要があります。
- CP_STATE_ERROR = -1
- CP_STATE_A = 0
- CP_STATE_B = 1
- CP_STATE_C = 2
- CP_STATE_D = 3
- EVReady - EVReady値を0または1として定義します
- EVErrorCode - 状態値は次のように定義されます:
- EV_NO_ERROR = 0
- EV_FAILED_RESS_TEMPERATURE_INHIBIT = 1
- EV_FAILED_EV_SHIFT_POSITION = 2
- EV_FAILED_CHARGER_CONNECTOR_LOCK_FAULT = 3
- EV_FAILED_EVRESS_MALFUNCTION = 4
- EV_FAILED_CHARGING_CURRENTDIFFERENTIAL = 5
- EV_FAILED_CHARGING_VOLTAGE_OUT_OF_RANGE = 6
- EV_RESERVED_A = 7
- EV_RESERVED_B = 8
- EV_RESERVED_C = 9
- EV_FAILED_CHARGING_SYSTEM_INCOMPATIBILITY = 10
- EV_NO_DATA = 11
- EVSoC - 符号なし整数値 0 -100
- EVTargetVoltage - 符号なし整数値
- EVTargetCurrent - 符号なし整数値
- EVChargeComplete - ChargeCompleteを0または1として定義します
- EVBulkChargeComplete - BulkChargeCompleteを0または1として定義します
- EVTimeToFullSoC - 符号なし整数値
- EVTimeToBulkSoC - 符号なし整数値
- SessionActive - 0または1として定義されます
- EVSEReceivedMessage - 次のように定義されます:
- セッションセットアップ_RES = 0
- サービス検出応答 = 1
- サービス詳細RES = 2
- 支払いサービス選択RES = 3
- 証明書インストール回数 = 4
- 証明書更新回数 = 5
- 支払い詳細 = 6
- 承認_RES = 7
- チャージパラメータ検出値 = 8
- ケーブルチェック_RES = 9
- プリチャージレス = 10
- POWER_DELIVERY_RES (充電進捗状況 = 開始) = 11
- 充電ステータス = 12
- メーター受信確認 = 13
- 現在の需要需要 = 14
- POWER_DELIVERY_RES (充電進行状況 = 停止) = 15
- 溶接検出抵抗 = 16
- セッション停止回数 = 17
- EVSEResponseCode - 次の値を持つ状態として定義されます:
- OK = 0
- OK_NEW_SESSION_ESTABLISHED = 1
- OK_OLD_SESSION_JOINED = 2
- OK_CERTIFICATE_EXPIRES_SOON = 3
- 失敗 = 4
- 失敗シーケンスエラー = 5
- 失敗_サービス_ID_無効 = 6
- 失敗_不明_セッション = 7
- 失敗_サービス_選択_無効 = 8
- 支払い選択が無効です = 9
- 失敗証明書の有効期限切れ = 10
- 署名エラー失敗 = 11
- 証明書が利用できません = 12
- 失敗した証明書チェーンエラー = 13
- チャレンジ失敗_無効 = 14
- 契約キャンセル失敗 = 15
- 失敗した_間違った_充電_パラメータ = 16
- 電力供給に失敗しました = 17
- 関税選択が無効です = 18
- 充電プロファイルが無効です = 19
- 計測署名が無効です = 20
- 請求サービスの選択に失敗しました = 21
- エネルギー転送モードが間違っています = 22
- 失敗_コンタクト_エラー = 23
- 失敗した証明書がこのEVSEでは許可されていません = 24
- 証明書失効失敗 = 25
- EVSEStatus - 次の値を持つ状態として定義されます:
- EVSE_NOT_READY = 0
- EVSE_READY = 1
- EVSE_シャットダウン = 2
- EVSE_UTILITY_INTERRUPT_EVENT = 3
- EVSE_ISOLATION_MONITORING_ACTIVE = 4
- EVSE_緊急シャットダウン = 5
- EVSE_MALFUNCTION = 6
- 予約済み_8 = 7
- 予約済み_9 = 8
- 予約済み_A = 9
- 予約済み_B = 10
- 予約済み_C = 11
- EVSEMaximumCurrentLimit - 浮動小数点値として定義されます
- EVSEMaximumVoltageLimit - 浮動小数点値として定義されます
- EVSEMaximumPowerLimit - 浮動小数点値として定義されます
- EVSEMinimumCurrentLimit - 浮動小数点値として定義されます
- EVSEMinimumVoltageLimit - 浮動小数点値として定義されます
- EVSEPeakCurrentRipple - 浮動小数点値として定義されます
- EVSECurrentRegulationTolerance - 浮動小数点値として定義されます
- EVSEEnergyToBeDelivered - 浮動小数点値として定義されます
- EVSEPresentCurrent - 浮動小数点値として定義されます
- EVSEPresentVoltage - 浮動小数点値として定義されます
- EVSECurrentLimitAchieved - 0または1として定義されます
- EVSEVoltageLimitAchieved - 0または1として定義されます
- EVSEPowerLimitAchieved - 0または1として定義されます
- RCD - 0または1として定義されます
- NotificationMaxDelay - 浮動小数点値として定義されます
- EVSENotification - 次の値を持つ状態として定義されます:
- なし = 0
- 充電停止 = 1
- 再ネゴシエーション = 2
- EVSENominalVoltage - 浮動小数点値として定義されます
- EVSEMaxCurrent - 浮動小数点値として定義されます
- EVChargeComplete - 0または1として定義されます
ISO 15118-2 EVCCコンポーネントの基本ロジック
ISO 15118-2 EVCCコンポーネントはプロトコルインターフェースのみを実装し、コントローラロジックは信号処理コンポーネントを用いて外部で定義されますが、それでも基本的なロジックは存在します。このロジックは、新しいセッションの開始タイミング、終了タイミング、およびいくつかの状態遷移を定義します。
シミュレーションが開始されると、コンポーネントは PP = PP_STATE_CONNECTED かつ CP = CP_STATE_B の場合にのみ新しい通信セッションを初期化します。
次のいずれかの条件が満たされた場合、コンポーネントはセッション停止メッセージを発行します: PP != PP_STATE_CONNECTED、CP = CP_STATE_ERROR、EVChargeComplete = True。
DC 充電時に、EV ターゲット電圧と EVSE 現在の電圧の差が、コンポーネント プロパティで定義されたプリチャージ電圧精度以下 (または等しい) になると、プリチャージから電流需要への移行が発生します。
ISO 15118 EVCCの例
ISO 15118-2 EVCC コンポーネントの使用方法の例は、例エクスプローラーの「通信プロトコル」→「iso 15118」→「電気自動車充電コントローラー」にあります。
この例では、EV側は単純なバッテリーとメインコンタクタとしてモデル化されています。EVSE側は信号制御電流源としてモデル化されています。PPおよびCP検出回路は、PWMデューティサイクルと周波数測定を除いたIEC 61851規格に従ってモデル化されています。基本的な電圧レベルが使用されています。
EV 充電コントローラのロジックは、通常起動、通常シャットダウン、緊急シャットダウンの IEC 61851 図に従って実装されています。
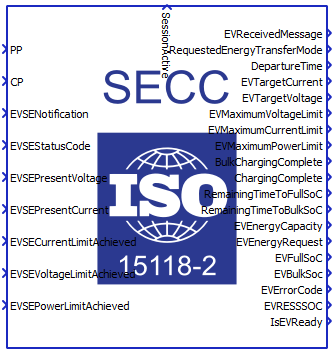
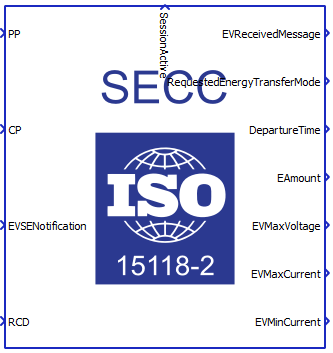
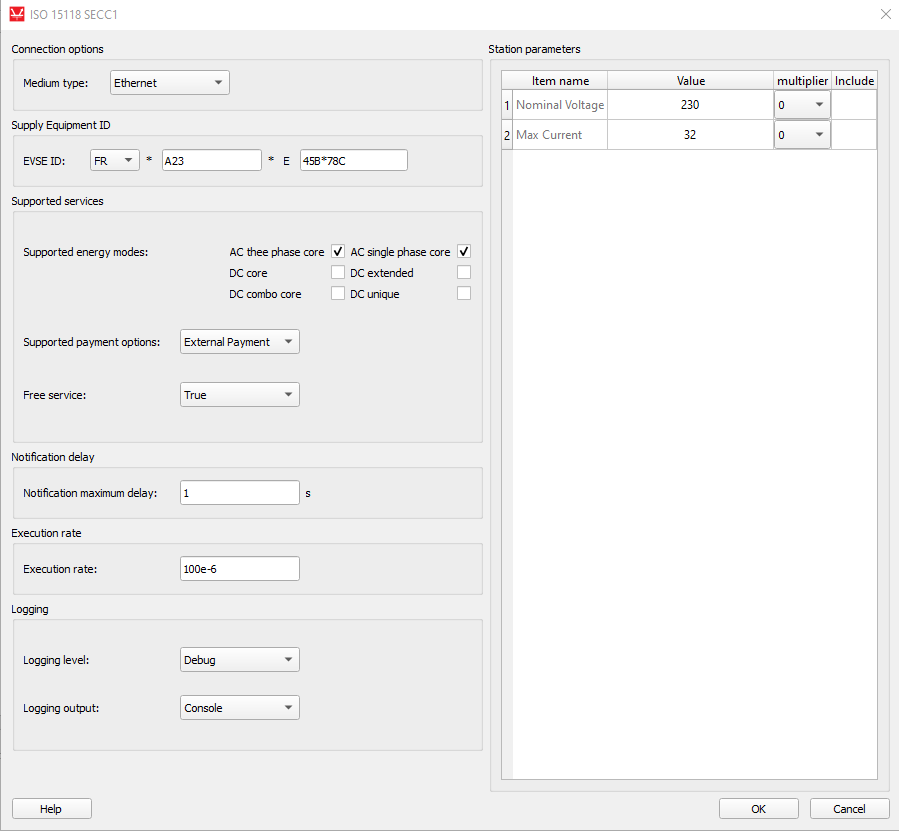
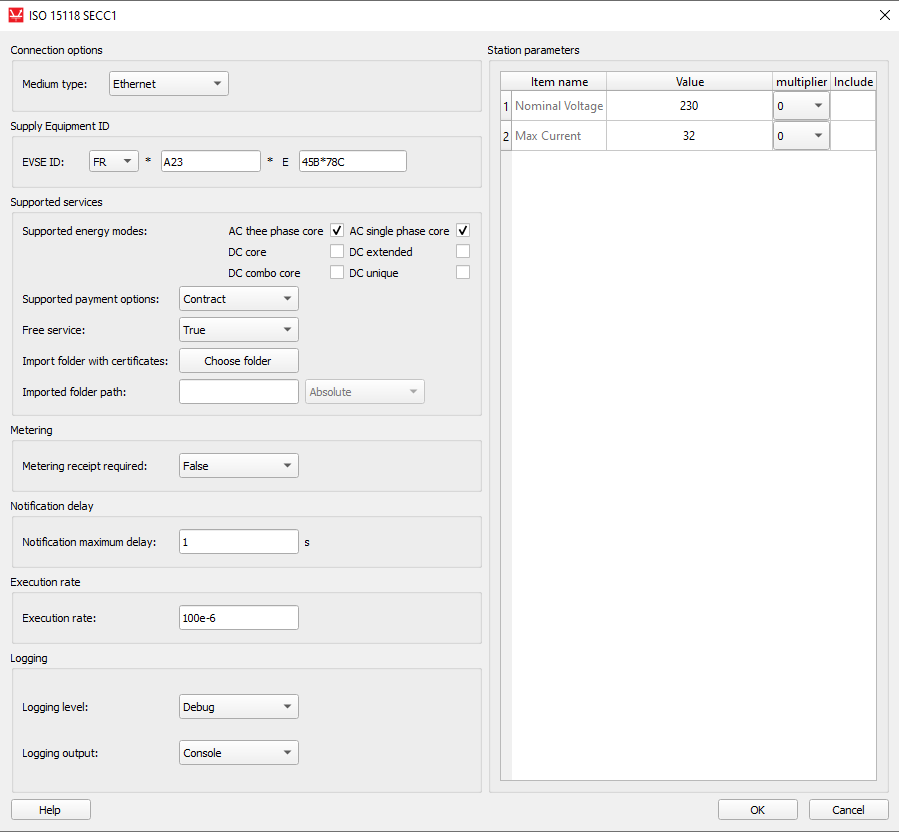
ISO 15118-2 SECCコンポーネント
ISO 15118-2 SECCコンポーネントは、プロトコルのSE側を実装します。このコンポーネントは通信インターフェースのみを実装し、コントローラ自体は実装しないことを明記することが重要です。つまり、このコンポーネントはSECCとEVCC間で必要なメッセージを中継するためだけに使用されます。コントローラ(またはロジック)部分は、信号処理コンポーネントを使用して個別に実装できます。
ISO 15118-2 SECCコンポーネントを表6に示します。
| 成分 | コンポーネントダイアログウィンドウ | プロパティ |
|---|---|---|
 |
  |
|
 |
|
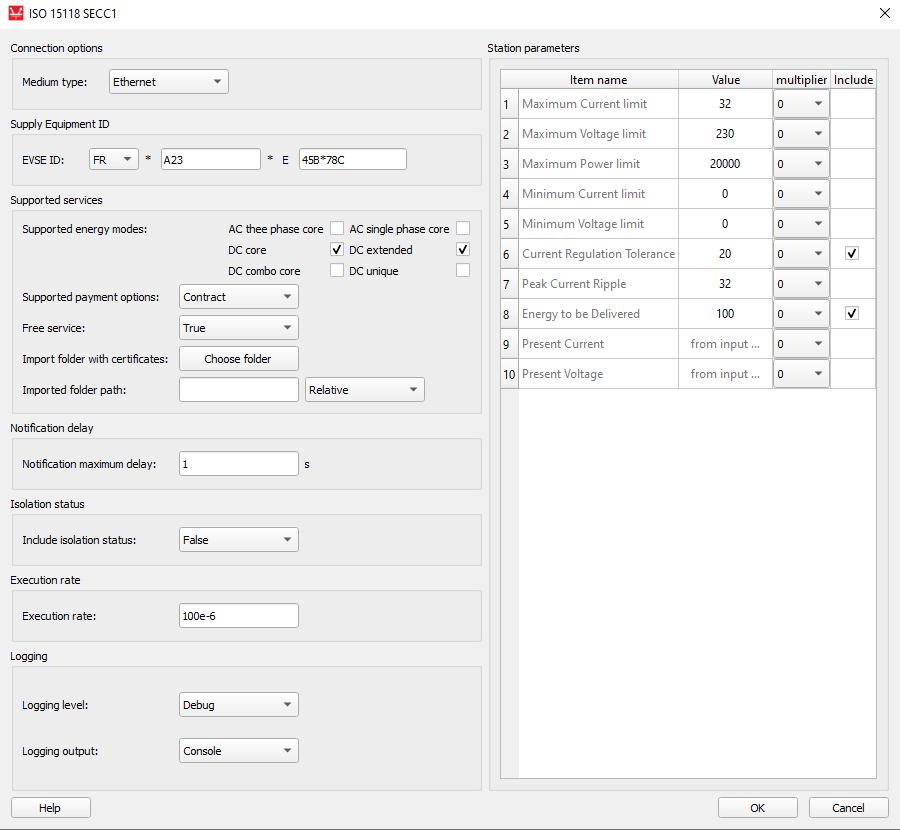
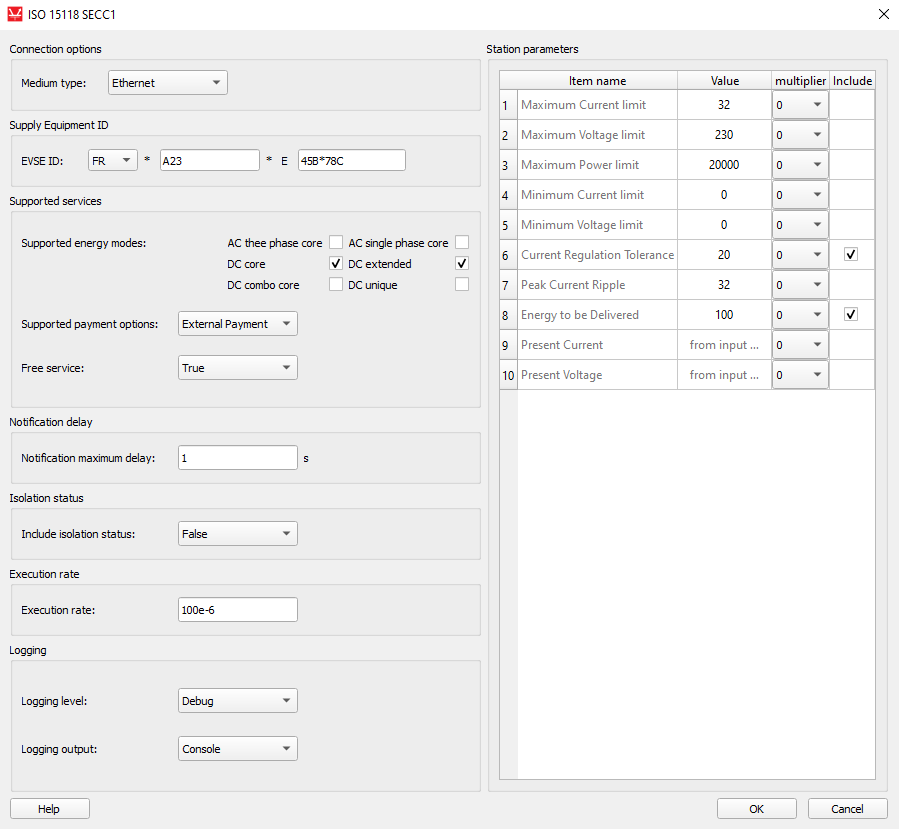
コンポーネントパラメータについては表7で説明されています。
| 名前 | 物件名 | デフォルト値 | 説明 |
|---|---|---|---|
| 中型タイプ | 中型 | イーサネット | SECCとEVCCが通信する媒体の種類を選択します。EthernetとPLCの媒体タイプが利用可能です。 |
| EVSE ID | evse_id |
{
"country_code" : "FR",
"operator_id" : "A23",
"power_outlet_id": "45B*78C"
}
|
EVSE と車両が接続されている電源コンセントを一意に識別する ID。 |
| サポートされているエネルギーモード | サポートされているエネルギー伝達モード |
[ 「AC三相コア」 、 「AC単相コア」 ] |
EVSE でサポートされている利用可能なエネルギー転送モード。 AC 単相コア、 AC 三相コア、 DC コア、 DC 拡張、 DC コンボ コア、 DC ユニークがサポートされています。 |
| サポートされている支払い方法 | サポートされている支払いオプション | 外部支払い | このタイプには、SECC が EVCC に提供する支払いオプションのリストが含まれており、サービスの支払いに選択できる方法を示します。 外部支払い そして 契約 お支払いオプションをご利用いただけます。 |
| 無料サービス | 無料サービス | 真実 | この要素は、SECCがEVCCによるサービス利用の可否を示すために使用されます。FreeServiceがtrueの場合、EVは提供されたサービスを無料で利用できます。現在、このオプションのみが利用可能です。 |
| メーターの領収書が必要です | メータリングレシート応答を含める | 間違い | この要素は、SECC によって使用され、メーター情報レコードに署名するために EVCC が MeteringReceiptReq メッセージを送信する必要があることを示します。 |
| 証明書を含むフォルダをインポートする | フォルダ選択ボタン | 間違い | EVCC からの必要な証明書、キー、およびパスワードが含まれるフォルダーに移動します。これらは、必要な通信を確立するために SECC にインポートされます。
もし、 契約 支払いオプションを選択した場合、次のファイルが必要になります。
|
| インポートされたフォルダのパス | フォルダパス | 「」 | 選択したフォルダーのファイルパスを表示します。 |
| パスタイプ | パスタイプ | 絶対 | 選択した値に応じて、フォルダーへのパスは絶対または相対になります。 |
| 通知最大遅延 | 通知最大遅延 | 1 | この値は、このメッセージが送信された時点から、アクションが即時実行されると予想される時間(相対時間)を秒単位で表したものです。SECCはEVSEStatusのNotificationMaxDelay要素を使用して、EVCCがEVSENotificationで示されたアクション要求に反応すると予想されるまでの時間を示します。 |
| ステーションパラメータ | ステーションパラメータ |
{
"max_current": {"value": 32,
"multiplier": 0},
"nominal_voltage": {"value": 230,
"multiplier": 0},
"maximum_current_limit": {"value": 32,
"multiplier": 0},
"maximum_voltage_limit": {"value": 230,
"multiplier": 0},
"maximum_power_limit": {"value": 20000,
"multiplier": 0},
"minimum_current_limit": {"value": 0,
"multiplier": 0},
"minimum_voltage_limit": {"value": 0,
"multiplier": 0},
"current_regulation_tolerance": {"value": 20,
"multiplier": 0,
"include": True},
"energy_to_be_delivered": {"value": 100,
"multiplier": 0,
"include": True},
"peak_current_ripple": {"value": 32,
"multiplier": 0},
"present_current": {"multiplier": 0},
"present_voltage": {"multiplier": 0}
}
|
ステーションパラメータは、 EVSEを記述するすべての静的値を定義します。すべての値の詳細な説明は、ステーションパラメータのプロパティ値に記載されています。 |
| 実行率 | 実行率 | 100e-6 | ISO 15118-2 EVCCコンポーネントの実行率 |
| ログレベル | ログレベル | デバッグ | ISO 15118-2 SECCコンポーネントのログ記録優先度レベル。選択可能なオプションは、オフ、情報、デバッグ、警告、エラーです。選択内容に応じて、そのランク以上のメッセージが表示されます。 |
| ログ出力 | ログ出力 | コンソール | ログ出力は、ログ メッセージが表示される場所を指定します。 |
| UDPポート | udp_port_edit | 65000 | ログ出力にUDPを選択した場合、メッセージは UDP ブロードキャスト ネットワーク上に表示されます。UDP ポートは、ログ メッセージが表示されるポートを指定します。 |
| 隔離ステータスを含める | 分離ステータスを含める | 間違い | このプロパティはDC充電のみに考慮されます。このプロパティ値がTrueに設定されている場合、SECCはEVCCに絶縁状態(絶縁監視の結果)に関する情報を送信します。 |
ステーションパラメータプロパティ値
ステーションパラメータは、SEの仕様と定格を定義するために使用されます。これらのパラメータは、AC充電の場合はChargeParameterDiscoveryRes 、 PowerDeliveryRes 、 ChargingStatusRes 、DC充電の場合はChargeParameterDiscoveryRes 、 PowerDeliveryRes 、 PreChargeRes 、 CurrentDemandReqなど、さまざまなリクエストメッセージで使用されます。これらのパラメータにはオプションと必須があります。
Stationパラメータプロパティは、定義済みフィールドを持つPython辞書として定義されています。これらのフィールドはすべて、 value 、 multiplier 、 include というフィールドを持つ辞書です。これらのフィールドの存在は、パラメータ自体と相関しています。パラメータがオプションの場合、 includeフィールドは必須です。パラメータがPhysicalValue型の場合、 multiplierは必須です。プロパティが静的な場合、 valueフィールドは必須です。
静的パラメータとは、充電プロセス中に変化しないパラメータです。例えば、AC充電の場合は最大電流、公称電圧、DC充電の場合は最大電流制限、最大電圧制限、最大電力制限、最小電流制限、最小電圧制限、電流レギュレーション許容値、供給エネルギー、ピーク電流リップルなどです。一方、動的プロパティは、充電プロセス全体を通して値が変化します。DC充電の場合は、現在の電圧と現在の電流です。これらの値は、コンポーネントの入力端子によって指定されます。
PhysicalValue はISO 15118 規格で定義された特定の型であり、 value 、 multiplier 、 unitから構成されます。 valueはshort型(-32768 - 32767)、 multiplier はbyte 型(-3 - 3)です。実数値は以下の式で計算されます。
値* 10 ^ (乗数)
| パラメータ | 必須/任意 | タイプ | デフォルト値 | 説明 |
|---|---|---|---|---|
| 公称電圧 | M |
物理的価値 0~1000V |
{
"value": 230,
"multiplier": 0
}
|
EVSEがサポートする線間電圧。これは、相と中性線の間で測定される電圧です。 |
| 最大電流 | M |
物理的価値 0~400A |
{
"value": 32,
"multiplier": 0
}
|
EVSE によって各相に設定される最大許容ライン電流制限。 |
| 最大電流制限 | M |
物理的価値 0~400A |
{
"value": 32,
"multiplier": 0
}
|
EVSE が供給できる最大電流。 |
| 最大電圧制限 | M |
物理的価値 0~1000V |
{
"value": 230,
"multiplier": 0
}
|
EVSE が供給できる最大電圧。 |
| 最大電力制限 | M |
物理的価値 0 - 200000 W |
{
"value": 20000,
"multiplier": 0
}
|
EVSE が供給できる最大電力。 |
| 最小電流制限 | M |
物理的価値 0~400A |
{
"value": 0,
"multiplier": 0
}
|
EVSE が期待される精度で供給できる最小電流。 |
| 最小電圧制限 | M |
物理的価値 0~1000V |
{
"value": 0,
"multiplier": 0
}
|
EVSE が期待される精度で供給できる最小電圧制限。 |
| 電流規制許容値 | お |
物理的価値 0~400A |
{
"value": 20,
"multiplier": 0,
"include": True
}
|
EVSE の調整許容値の絶対値。 |
| 供給されるエネルギー | お |
物理的価値 0 - 200000Wh |
{
"value": 100,
"multiplier": 0,
"include": True
}
|
EVSE によって供給されるエネルギーの量。 |
| ピーク電流リップル | M |
物理的価値 0~400A |
{
"value": 32,
"multiplier": 0
}
|
EVSE の電流リップルのピークツーピーク振幅。 |
| 現在 | M |
物理的価値 0~400A |
{
"multiplier": 0
}
|
EVSE の現在の出力電流。 |
| 現在の電圧 | M |
物理的価値 0~1000V |
{
"multiplier": 0
}
|
EVSE の現在の出力電圧。 |
入出力端子と状態値
信号処理信号は、端末を使用して ISO 15118-2 SECC コンポーネントとの間でやり取りされます。
- PP - 近接パイロット (PP) 信号の電圧レベルを渡すのではなく、次のように定義される PP 状態を渡す必要があります。
- PP_STATE_ERROR = -1
- PP_STATE_DISCONNECTED = 0
- PP_STATE_CONNECTED = 1
- PP_STATE_DEPRESSED = 2
- CP - コントロール パイロット (CP) 信号の電圧レベルを渡すのではなく、次のように定義された CP 状態を渡す必要があります。
- CP_STATE_ERROR = -1
- CP_STATE_A = 0
- CP_STATE_B = 1
- CP_STATE_C = 2
- CP_STATE_D = 3
- EVSENotification - この値は、SECCがEVCCの動作に影響を与えるために使用されます。EVSENotificationには、SECCがEVCCに実行してほしいアクションが含まれます。EVCCは、NotificationMaxDelayで指定された時間まで、要求されたアクションを実行することを期待します。目標時間が未来でない場合、EVCCは直ちにアクションを実行することが期待されます。通常動作中、EVSENotificationの値は次のように設定されます。 なしEVSENotification は次のように定義されて渡される必要があります。
- なし = 0
- 充電停止 = 1
- 再ネゴシエーション = 2
- RCD - 残留電流デバイス(RCD)の現在の状態を示します。RCDがtrueの場合、RCDはエラーを検出しました。RCDがfalseの場合、RCDはエラーを検出していません。このステータスフラグは情報提供のみを目的としています。RCDは次のように定義して渡されます。
- 真 = 1
- 偽 = 0
- EVSEStatusCode - EVSEの内部状態を示します。以下の値を持つ状態として定義されます。
- EVSE_NOT_READY = 0
- EVSE_READY = 1
- EVSE_シャットダウン = 2
- EVSE_UTILITY_INTERRUPT_EVENT = 3
- EVSE_ISOLATION_MONITORING_ACTIVE = 4
- EVSE_緊急シャットダウン = 5
- EVSE_MALFUNCTION = 6
- 予約済み_8 = 7
- 予約済み_9 = 8
- 予約済み_A = 9
- 予約済み_B = 10
- 予約済み_C = 11
- EVSEPresentVoltage - EVSEの現在の出力電圧。符号なし整数値として定義されます。
- EVSEPresentCurrent - EVSEの現在の出力電流。符号なし整数値として定義されます。
- EVSECurrentLimitAchieved - true に設定されている場合、EVSE は現在の制限に達しています。0 または 1 で定義されます。
- EVSEVoltageLimitAchieved - true に設定されている場合、EVSE が電圧制限に達しています。0 または 1 で定義されます。
- EVSEPowerLimitAchieved - true に設定されている場合、EVSE は電力制限に達しています。0 または 1 として定義されます。
- SessionActive - EVCC が接続されていない場合は 0、接続が確立されている場合は 1 と定義されます。
- EVReceivedMessage - 次のように定義されます:
- セッションセットアップ要求 = 0
- サービス検出要求 = 1
- サービス詳細要求 = 2
- 支払いサービス選択要求 = 3
- 証明書インストール要求 = 4
- 証明書更新要求 = 5
- 支払い詳細要求 = 6
- 承認要求 = 7
- チャージパラメータ検出要求 = 8
- ケーブルチェック要求 = 9
- 事前チャージ要求 = 10
- POWER_DELIVERY_REQ (ChargeProgress = START) = 11
- 充電ステータス要求 = 12
- メータリング受信要求 = 13
- 現在の需要要求 = 14
- POWER_DELIVERY_REQ (充電進行状況 = 停止) = 15
- 溶接検出要求 = 16
- セッション停止要求 = 17
- RequestedEnergyTransferMode - EVCC によって要求される充電用の選択されたエネルギー転送モード。次のいずれかになります。
- なし = 0
- AC_単相_コア = 1
- AC_三相_コア = 2
- DC_コア = 3
- DC_拡張 = 4
- DC_コンボ_コア = 5
- DC_ユニーク = 6
- DepartureTime - 浮動小数点値として定義されます。
- EAmount - 浮動小数点値として定義されます
- EVMaxVoltage - 浮動小数点値として定義されます
- EVMaxCurrent - 浮動小数点値として定義されます
- EVMinCurrent - 浮動小数点値として定義されます
- EVTargetCurrent - 浮動小数点値として定義されます
- EVTargetVoltage - 浮動小数点値として定義されます
- EVMaximumVoltageLimit - 浮動小数点値として定義されます
- EVMaximumCurrentLimit - 浮動小数点値として定義されます
- EVMaximumPowerLimit - 浮動小数点値として定義されます
- BulkChargingComplete - 0または1として定義されます
- ChargingComplete - 0または1として定義されます
- RemainingTimeToFullSoC - 浮動小数点値として定義されます
- RemainingTimeToBulkSoC - 浮動小数点値として定義されます
- EVEnergyCapacity - 浮動小数点値として定義されます
- EVEnergyRequest - 浮動小数点値として定義されます
- EVErrorCode - 次の値を持つ状態として定義されます:
- EV_NO_ERROR = 0
- EV_FAILED_RESS_TEMPERATURE_INHIBIT = 1
- EV_FAILED_EV_SHIFT_POSITION = 2
- EV_FAILED_CHARGER_CONNECTOR_LOCK_FAULT = 3
- EV_FAILED_EVRESS_MALFUNCTION = 4
- EV_FAILED_CHARGING_CURRENTDIFFERENTIAL = 5
- EV_FAILED_CHARGING_VOLTAGE_OUT_OF_RANGE = 6
- EV_RESERVED_A = 7
- EV_RESERVED_B = 8
- EV_RESERVED_C = 9
- EV_FAILED_CHARGING_SYSTEM_INCOMPATIBILITY = 10
- EV_NO_DATA = 11
- EVRESSSOC - 符号なし整数値 0 -100
- IsEVReady - 0または1として定義されます
ISO 15118-2 SECCコンポーネントの基本ロジック
ISO 15118-2 SECCコンポーネントはプロトコルインターフェースのみを実装し、コントローラロジックは信号処理コンポーネントを使用して外部で定義されていますが、それでも基本的なロジックは存在します。このロジックは、サーバーの起動タイミングと強制終了タイミングを定義します。
シミュレーションが開始されると、サーバーは PP = PP_STATE_CONNECTED かつ CP = STATE_C の場合にのみ初期化されます。
セッションがアクティブで、PP = PP_STATE_DICONNECTED または PP = PP_STATE_ERROR または CP = STATE_A または CP = CP_STATE_ERROR の場合、接続は強制的に閉じられます。
ISO 15118-2 プロトコルメッセージログ
ISO 15118-2 は、ログ メッセージに対して 3 つの異なるログ出力を提供します。
コンソール出力は、システムからのログメッセージをstdout(標準出力)に出力します。HILをシリアル通信でPCに接続し、SSHクライアントソフトウェア(例: PuTTY )を使用してコンソールを表示すると、標準出力に表示されるメッセージを確認できます。
ファイル出力は、システムからのログメッセージをテキストファイル「iso15118.log」に出力します。プログラム終了後、このファイルはHIL上のパス「/mnt/ext_files/iso15118/iso15118.log」で確認できます。このテキストファイルにアクセスする方法の一つは、 WinSCPソフトウェアを使用することです。
UDP出力は、システムからのログメッセージをUDPブロードキャストポートに送信します。メッセージを受信するには、スケマティックエディタのモデルをコンパイルしてHIL SCADAで実行する前に、コンピュータのターミナルからスクリプト「\examples\models\communication protocols\iso 15118\electric vehiclecharge controller\udp log receive.py」を実行する必要があります。メッセージの読み取りを可能にするには、HILとコンピュータが同じブロードキャストアドレス上にある必要があります(同じサブネット上にあり、イーサネット接続でネットワーク接続されている必要があります)。メッセージは、HILデバイスと同じブロードキャストアドレスに接続された複数の異なるコンピュータで読み取ることができます。
仮想HILサポート
Virtual HILは現在このプロトコルをサポートしていません。非リアルタイム環境(例:ローカルコンピュータでモデルを実行する場合)を使用する場合、このコンポーネントへの入力は破棄され、このコンポーネントからの出力はゼロになります。
参考文献
- 国際電気標準会議(IEC)、「IEC 61851、電気自動車の導電性充電システム - パート1:一般要求事項」、2010年、14ページ
- 国際電気標準会議(IEC)、「IEC 61851、電気自動車導電性充電システム - パート23:DC電気自動車充電ステーション」、2014年、33~70ページ
- 国際標準化機構(ISO)、「ISO 15118、道路車両 - 車両とグリッド間の通信インターフェース - パート1:一般情報およびユースケース定義」、2013年、1~45ページ
- 国際標準化機構(ISO)、「ISO 15118、道路車両 - 車両とグリッド間の通信インターフェース - パート2:ネットワークおよびアプリケーションプロトコルの要件」、2014年、11~104ページ
- M. Multin、「Vehicle-to-Grid アプリケーションの実現手段としての ISO 15118」、2018 年国際自動車電気電子技術会議、2018 年、pp. 1-6、doi: 10.23919/EETA.2018.8493213。