対称コンポーネント
3 相システムを対称位相器のセットに変換する回路図エディターの対称コンポーネント コンポーネントの説明。
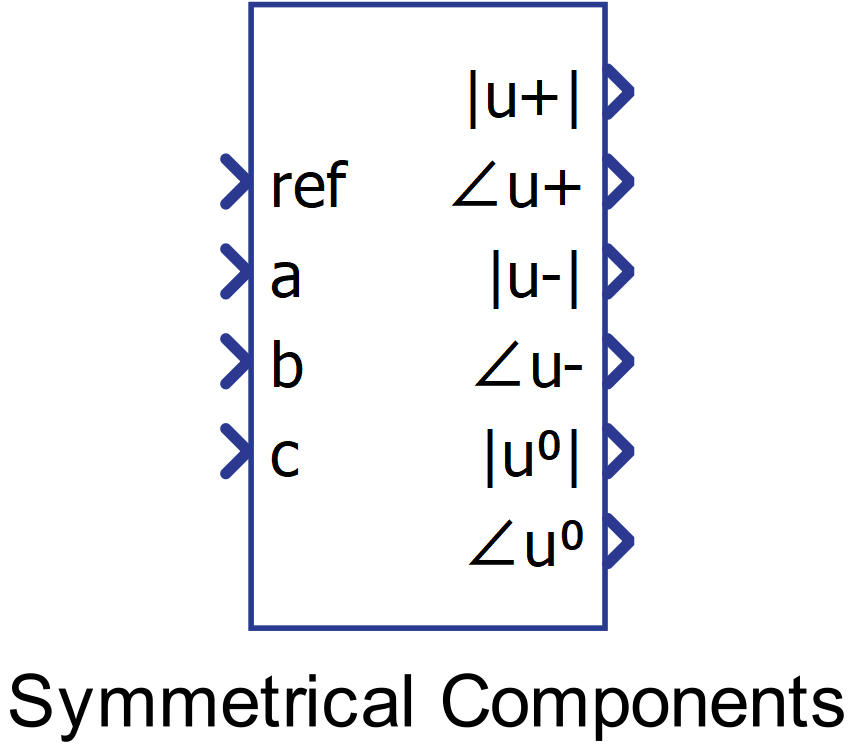
コンポーネントアイコン
説明
3 相システムを対称位相器のセットに変換します。
このコンポーネントへの入力は、三相信号と位相計算に使用される参照信号です。コンポーネントは、正相、負相、零相の3組の対称位相器を出力します。各組は、RMS値と位相値で構成されます。
最初のステップとして、入力信号は時間領域から複素領域に変換されます。その後、Fortescue変換を実行し、以下の式を用いて正相、負相、および零相位相器を計算します。
,
1つの 回転位相器を表す:
,
ここで、 realとimag はそれぞれ位相器の実部と虚部を表します。
RMS 値と位相値は、選択したパラメータ値に応じて、固定周波数または可変周波数を使用して計算されます (周波数ソースを参照)。
コンポーネントの正しい出力を確保するには、次の点に注意する必要があります。 .
ポート
- 参照(入力)
- Ref入力は位相計算のための基準信号を接続するために用いられます。通常、信号は 1つの この端末に接続されています。
- サポートされる型: uint、int、real。
- ベクターサポート: いいえ。
- Ref入力は位相計算のための基準信号を接続するために用いられます。通常、信号は 1つの この端末に接続されています。
- a(イン)
- 入力 1つの 三相abcシステムに対応するコンポーネント。
- サポートされる型: uint、int、real。
- ベクターサポート: いいえ。
- 入力 1つの 三相abcシステムに対応するコンポーネント。
- b(インチ)
- 入力 b 三相abcシステムに対応するコンポーネント。
- サポートされる型: uint、int、real。
- ベクターサポート: いいえ。
- 入力 b 三相abcシステムに対応するコンポーネント。
- c(インチ)
- 入力 c 三相abcシステムに対応するコンポーネント。
- サポートされる型: uint、int、real。
- ベクターサポート: いいえ。
- 入力 c 三相abcシステムに対応するコンポーネント。
- f(インチ)
- 入力 f コンポーネントの、3相abcシステムの周波数に対応します(「外部」周波数ソースを選択した場合)。
- サポートされる型: uint、int、real。
- ベクターサポート: いいえ。
- 入力 f コンポーネントの、3相abcシステムの周波数に対応します(「外部」周波数ソースを選択した場合)。
- |u+|
- この端子は正相位相器の RMS 値を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子は正相位相器の RMS 値を出力します。
- ∠u+
- この端子は、正相位相器の位相角値(参照信号と比較)を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子は、正相位相器の位相角値(参照信号と比較)を出力します。
- |u-|
- この端子は負シーケンス位相器の RMS 値を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子は負シーケンス位相器の RMS 値を出力します。
- ∠u-
- この端子は、負のシーケンス位相器の位相角値(参照信号と比較)を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子は、負のシーケンス位相器の位相角値(参照信号と比較)を出力します。
- |u 0 |
- この端子はゼロシーケンス位相器の RMS 値を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子はゼロシーケンス位相器の RMS 値を出力します。
- ∠u 0
- この端子は、ゼロシーケンス位相器の位相角値(参照信号と比較)を出力します。
- サポートされるタイプ: 実数。
- ベクターサポート: いいえ。
- この端子は、ゼロシーケンス位相器の位相角値(参照信号と比較)を出力します。
プロパティ
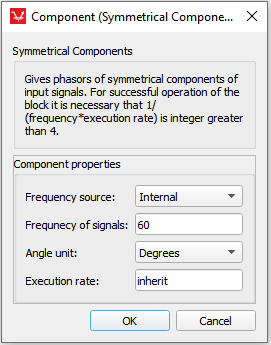
- 周波数源
- 選択した値が「内部」の場合、コンポーネントは固定周波数値を使用して出力を計算します。「外部」値を使用する場合は、追加の入力が作成され、信号処理を通じて周波数値が提供される必要があります。
- 信号の周波数
- このプロパティを使用して入力信号の周波数を入力します。コンポーネントは固定周波数値を使用して出力を計算します。
- 角度単位
- 角度はラジアンまたは度で表すことができます。
- 実行率
- 希望する信号処理実行速度を入力してください。この値は、同じ回路内の他の信号処理コンポーネントと互換性がある必要があります。つまり、回路内で最も速い実行速度の倍数である必要があります。実行速度は最大4つまで指定できます。実行速度の指定には、小数(例:0.001)または指数値(例:1e-3)(秒単位)を使用できます。または、「inherit」と入力すると、入力を受け取るコンポーネントの実行速度に基づいて、コンポーネントに実行速度が割り当てられます。