ABB DDCS
Typhoon HIL ツールチェーンにおける ABB DDCS プロトコル実装の説明。
コンポーネントはサポートされていません:このコンポーネントは現在 TyphoonSim ではサポートされていません。このコンポーネントをモデルに追加すると、TyphoonSim でモデルを実行できなくなります。TyphoonSim モードでモデルを実行する前に、このコンポーネントを無効にするか、モデルから削除してください。
Typhoon HILツールチェーンにおけるABB DDCS
DDCS(分散型ドライブ通信システム)は、ACドライブの高速通信ニーズに対応するために設計されたABB独自の通信プロトコルです。このプロトコルは、パラメータの読み書き、参照値の付与、診断情報の読み取りなどの機能をサポートしています。ABB DDCSプロトコルのTyphoon HIL実装は、HILデバイスのGPIOピンを介して動作します。
| 成分 | ダイアログウィンドウ |
|---|---|
 |
  |
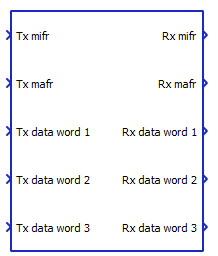
| ポート | 説明 |
|---|---|
| Tx/Rx mifr | 送受信される 8 ビットのマイナー機能コード。 |
| Tx/Rx mafr | 送受信される 8 ビットの主要機能コード。 |
| Tx/Rxデータワード | 送受信される 16 ビットのデータ ワード。 |
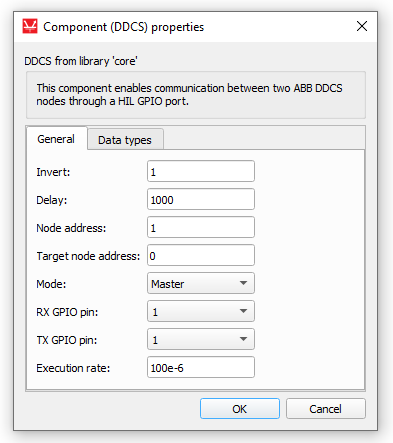
| パラメータ | 説明 |
|---|---|
| 反転 | 1 に設定すると、入力信号と出力信号が反転します。 |
| 遅れ | データ受信から応答送信までの遅延(µs)。最小遅延値は10µsです。 |
| ノードアドレス | このコンポーネントのアドレス。 |
| ターゲットノードアドレス | コンポーネント データが送信されるアドレス。 |
| モード | マスター操作とスレーブ操作の選択。 |
| RX/TXピン | どの GPIO ピンを DDCS TX および RX にマップするかを構成します。 |
| 実行率 | 信号処理実行速度。 |
接続性
HILデバイスをDDCSネットワークに接続するために、光コンバータが使用されます。コンバータはHIL GPIOに接続され、HILの入出力信号を光信号に変換します(図1 、図2 、図3を参照)。
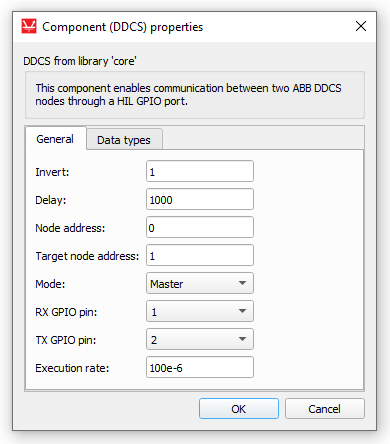
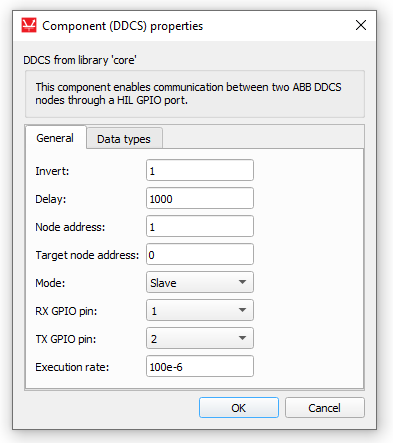

図 3に示すコンバータ GPIO コネクタ内のハードウェア接続の順序は次のとおりです。
- GPIO 1 → RX0
- GPIO 2 → TX0
- GPIO 3 → RX1
- GPIO 4 → TX1
- GPIO 5 → RX2
- GPIO 6 → TX2
- GPIO 7 → RX3
- GPIO 8 → TX3