ホール効果センサー
機械のローターの位置を検出するために使用される、回路図エディターのホール効果センサー コンポーネントの説明。
コンポーネントアイコン
説明
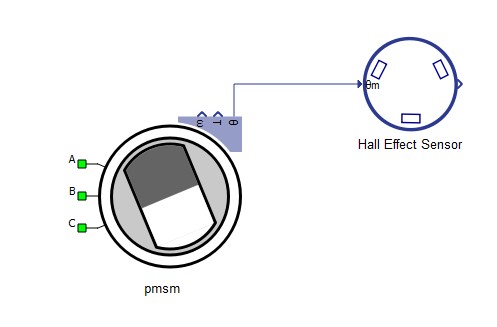
このコンポーネントは、図2に示すように、機械の機械角度出力に接続します。このコンポーネントの出力は、ホールA、ホールB、ホールCのデジタル信号を含む単一のベクトル化信号処理出力です。
信号処理実行速度で実行されるため、実行速度を考慮する必要があります。
ホール効果センサーの動作原理は、3つのデジタル出力に基づいており、その値によって6つの位置セグメントが決定されます。表1は、デジタル出力の状態に基づく位置セグメントを示しています。
機械の電気角は次のように表されます。
、 どこ 極対の数です。
| ポジションセグメント | ホールA | ホールB | ホールC |
|---|---|---|---|
| 1 | 0 | 0 | |
| 1 | 1 | 0 | |
| 0 | 1 | 0 | |
| 0 | 1 | 1 | |
| 0 | 0 | 1 | |
| 1 | 0 | 1 |
ポート
- θm
- 機械角度入力 [rad]
- 外
- デジタルホールA、ホールB、ホールC信号を含むベクトル化された信号処理出力
プロパティ
- 極対数
- 接続された機械の回転子極対の数
- 実行率
- 信号処理出力実行速度[秒]