三相かご形誘導機(SP)
回路図エディタの 3 相かご形誘導機 (SP) コンポーネントの説明。
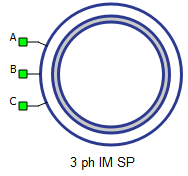
A、B、Cはステータ巻線端子です。ステータ巻線は電流源インターフェースを使用します。
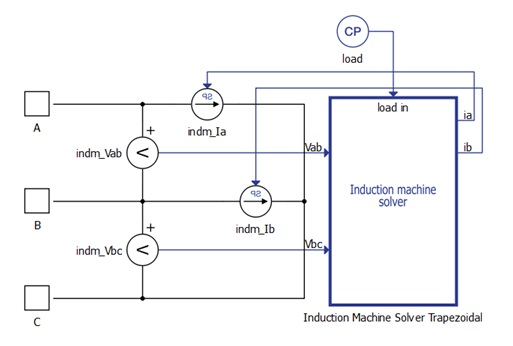
このマシンは、コンポーネント名に「SP」が付いている信号処理を採用した三相かご形誘導機の代替実装です。電気部品と信号処理部の両方から構成されるハイブリッドコンポーネントです(図2 )。電気部品は2つの制御電流源とスナバ抵抗で構成され、電気方程式と機械方程式を含む完全なマシンモデルは、回路の信号処理部にC関数として実装されています。
このマシンの利点は、プロセッサのハードウェアマシンソルバーを使用しないため、HILあたりのマシン数に制限がないことです。欠点は、このマシンモデルが電気回路の選択されたシミュレーションステップではなく、ソルバーの実行速度に基づいて実行されることです。つまり、SP誘導機の実行速度はモデル内のコンポーネントインスタンスの数に依存し、通常は10~100μsの範囲になります。
電気サブシステムモデル
機械の電気部品は、静止したαβ座標系でモデル化された以下の連立方程式で表されます。回転子のすべての変数とパラメータは固定子を基準とします。
| シンボル | 説明 |
|---|---|
| ψ αs | 固定子磁束のアルファ軸成分[Wb] |
| ψ βs | 固定子磁束のベータ軸成分[Wb] |
| ψ αr | 固定子を基準とした回転子磁束のアルファ軸成分[Wb] |
| ψ βr | 固定子を基準とした回転子磁束のベータ軸成分[Wb] |
| i αs | 固定子電流のアルファ軸成分[A] |
| i βs | 固定子電流のベータ軸成分 [A] |
| i αr | 回転子電流のアルファ軸成分(固定子参照)[A] |
| i βr | 回転子電流のベータ軸成分(固定子参照)[A] |
| v αs | 固定子電圧のアルファ軸成分[V] |
| v βs | 固定子電圧のベータ軸成分[V] |
| v αr | ステータを基準としたローター電圧のアルファ軸成分[V] |
| v βr | 固定子を基準とした回転子電圧のベータ軸成分[V] |
| Rs | 固定子相抵抗 [Ω] |
| R r | 固定子を基準とした回転子相抵抗 [Ω] |
| Lメートル | 磁化(相互、主)インダクタンス [H] |
| Ls | 固定子相インダクタンス[H]( ) |
| 左r | 固定子を基準とした回転子位相インダクタンス[H]( ) |
| ω r | ローター電気速度 [rad/s] ( ) |
| p | 機械の極対数 |
| T e | 機械発生電磁トルク[Nm] |
機械サブシステムモデル
運動方程式:
| シンボル | 説明 |
|---|---|
| ω m | ローターの機械速度 [rad/s] |
| Jメートル | ローターと負荷の合成慣性モーメント [kgm2] |
| T e | 機械発生電磁トルク[Nm] |
| T l | シャフトの機械的負荷トルク [Nm] |
| b | 機械粘性摩擦係数[Nms] |
| θ m | ローター機械角度 [rad] |
ポート
- A(電気)
- ステータ巻線 A 相ポート。
- B(電気)
- ステータ巻線相 B ポート。
- C(電気)
- ステータ巻線相Cポート。
- で
- モデルロード ソースを選択した場合に使用できます。
電気(タブ)
- f
- 機械定格周波数[Hz]
- ルピー
- 固定子相抵抗 [Ω]
- rr
- 固定子を基準とした回転子相抵抗 [Ω]
- Lls
- 固定子漏れインダクタンス[H]
- Llr
- 固定子を基準とした回転子漏れインダクタンス[H]
- ルム
- 磁化(相互、主)インダクタンス [H]
メカニカル(タブ)
- 月経前緊張症
- 機械の極対数
- ジャム
- ローターと負荷の合成慣性モーメント [kgm2]
- 摩擦係数
- 機械粘性摩擦係数[Nms]
ロード(タブ)
- ロードソース
- 負荷ソースは、SCADA/外部またはモデルから設定できます (モデルの場合、1 つの信号処理入力が表示されます)。
- 外部/モデル荷重タイプ
- 負荷の種類: トルクまたは速度
測定値(タブ)
このブロックタブは、機械からのベクトル化された単一の信号出力を可能にします。出力ベクトルには、選択された機械の機械的変数および/または電気的変数が、このタブにリストされている順序と同じ順序で含まれます。
- 固定子A相電流
- 固定子A相電流[A]
- ステータB相電流
- ステータB相電流[A]
- 固定子C相電流
- 固定子C相電流[A]
- 電気トルク
- 機械電気トルク[Nm]
- 機械速度
- 機械の機械角速度[rad/s]
- 機械角度
- 機械機械角度 [rad]
実行率(タブ)
- 実行率
- 信号処理実行速度[秒]
スナッバー(タブ)
- スナバ抵抗
- ステータスナバ抵抗値 [Ω]
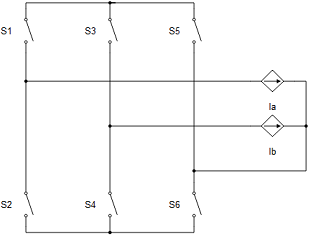
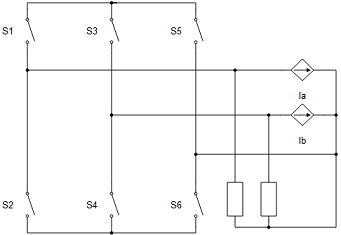
電流源ベースの回路インターフェースを持つすべてのマシンには、プロパティ ウィンドウに[スナバ]タブがあり、スナバ抵抗の値を設定できます。インバータまたはコンタクタがマシンの端子に直接接続される場合、スナバが必要です。この値は無限大 ( inf ) に設定できますが、電流源がオープン スイッチに直接接続されるため、マシンがインバータに直接接続されている場合は推奨されません。この場合、トポロジの競合を回避するために、スイッチ ペア S1 と S2、S3 と S4、および S5 と S6 のいずれかが回路ソルバーによって強制的に閉じられます。一方、有限のスナバ値を使用すると、常に電流 Ia と Ib のパスが存在するため、この場合はすべてのインバータ スイッチをオープンにすることができます。この回路のスナバ抵抗なしとスナバ抵抗ありの回路図をそれぞれ図 3と図 4に示します。スナバは電流源に接続されます。
特典(タブ)
「Extras」タブでは、コンポーネントの信号アクセス管理を設定できます。
- パブリック - パブリックとしてマークされたコンポーネントは、すべてのレベルでシグナルを公開します。
- 保護済み - 保護済みとしてマークされたコンポーネントは、最初のロックされた親コンポーネントの外部のコンポーネントへの信号を非表示にします。
- 継承 - 継承としてマークされたコンポーネントは、継承以外の値に設定されている最も近い親の 'signal_access' プロパティ値を取得します。