三相巻線回転子同期機
回路図エディタの 3 相巻線ローター同期機コンポーネントの説明。
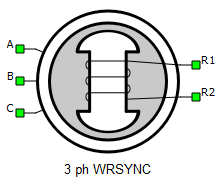
A、B、Cは固定子巻線端子です。固定子巻線は電流源インターフェースを使用します。R1とR2は界磁巻線端子です。回転子巻線は単相電流源インターフェースを使用します。
電気サブシステムモデル
機械の電気部分は、回転するdq座標系でモデル化された以下の連立方程式で表されます。dq座標系は回転子に接続され、直軸は界磁巻線と一致します。モデル化されたダイナミクスは、以下の方程式で表すことができます。
飽和効果を考慮すると、方程式は同じ形式になりますが、その場合、磁束は固定子電流の関数になります。
どこ:
そして:
すべての回転子変数とパラメータは、適切な巻数比を持つステータを基準としています。これを説明するために、界磁巻線端子に電圧v fd rを印加すると、次の式でステータ値v fdに変換されます。
同様に、計算されたローター電流、すなわち界磁巻線電流i fd 、ダンパー巻線電流i kd 、 i kqは、次の式を通じて実際のローター巻線値i fd r 、 i kd r 、 i kq rに参照されます。
| シンボル | 説明 |
|---|---|
| ψ ds | 固定子磁束の直軸成分[Wb] |
| ψ qs | 固定子磁束の直交軸成分[Wb] |
| ψ kd | 固定子を基準としたダンパー巻線磁束の直軸成分[Wb] |
| ψ kq | 固定子を基準としたダンパー巻線磁束の直交軸成分[Wb] |
| ψ fd | 固定子を基準とした界磁巻線磁束 [Wb] |
| ψ kq2 | 固定子を基準としたダンパー巻線磁束の2番目の直交軸成分[Wb] |
| 私は | 固定子電流の直軸成分[A] |
| 私は質問します | 固定子電流の直交軸成分[A] |
| 私はkd | ダンパー巻線電流の直軸成分(固定子基準)[A] |
| 私はkd r | ダンパー巻線電流の直軸成分 [A] |
| 私はkq | ダンパー巻線電流の直交軸成分(固定子基準)[A] |
| 私はkq r | ダンパー巻線電流の直交軸成分[A] |
| 私はFD | 固定子基準の界磁巻線電流 [A] |
| 私はfd r | 界磁巻線電流 [A] |
| i kq2 | ダンパー巻線電流の2番目の直交軸成分(固定子基準)[A] |
| v ds | 固定子電圧の直軸成分[V] |
| v qs | 固定子電圧の直交軸成分[V] |
| v kd | ダンパー巻線電圧の直軸成分(固定子基準)[V] |
| v kq | 固定子を基準としたダンパー巻線電圧の直交軸成分[V] |
| v fd | 固定子基準の界磁巻線電圧 [V] |
| v fd r | 界磁巻線電圧 [V] |
| v kq2 | ダンパー巻線電圧の2番目の直交軸成分(固定子基準)[V] |
| 私はMD | 磁化電流の直軸成分 [A] |
| 私はMQ | 磁化電流の直交軸成分 [A] |
| ψ md | 磁化磁束の直軸成分[Wb] |
| ψ mq | 磁化磁束の直交軸成分[Wb] |
| 私は | 磁化電流 [A] |
| ψ m | 磁化磁束 [Wb] |
| Rs | 固定子相抵抗 [Ω] |
| R kd | 固定子を基準とした直軸ダンパー巻線抵抗 [Ω] |
| R kq | 固定子を基準とした直交軸ダンパー巻線抵抗 [Ω] |
| R kq2 | 固定子を基準とした第2直交軸ダンパー巻線抵抗[Ω] |
| R fd | 固定子を基準とした界磁巻線抵抗 [Ω] |
| L ls | 固定子相漏れインダクタンス[H] |
| L md | 直軸磁化(相互、主)インダクタンス [H] |
| L mq | 直交軸磁化(相互、主)インダクタンス [H] |
| L lkd | 固定子を基準とした直軸ダンパー巻線漏れインダクタンス[H] |
| L lkq | 固定子を基準とした直交軸ダンパー巻線の漏れインダクタンス[H] |
| L lkq2 | 固定子を基準とした第2直交軸ダンパー巻線漏れインダクタンス[H] |
| L lfd | 固定子基準の直軸界磁巻線漏れインダクタンス[H] |
| L c | 固定子を基準としたカナイ漏れインダクタンス[H] |
| ω r | ローター電気速度 [rad/s] ( ) |
| p | 機械の極対数 |
| T e | 機械発生電磁トルク[Nm] |
| N s /N fd | ステータ相巻線と界磁巻線間の巻数比。界磁巻線変数をステータ側に変換するために使用される。 |
| N s /N kd | 固定子相巻線と直軸ダンパー巻線間の巻数比。ダンパー巻線変数を固定子側に変換するために使用される。 |
| N s /N kq | 固定子相巻線と直交軸ダンパー巻線間の巻数比。ダンパー巻線変数を固定子側に変換するために使用される。 |
機械サブシステムモデル
運動方程式:
| シンボル | 説明 |
|---|---|
| ω m | ローターの機械速度 [rad/s] |
| Jメートル | ローターと負荷の合成慣性モーメント [kgm2] |
| T e | 機械発生電磁トルク[Nm] |
| T l | シャフトの機械的負荷トルク [Nm] |
| b | 機械粘性摩擦係数[Nms] |
| θ m | ローター機械角度 [rad] |
飽和効果
三相巻線回転子同期機の機械モデルは、磁気飽和効果を考慮することができます。その場合、磁束は磁化電流i mdとi mqの関数として定義されます。これらの関数はルックアップテーブルの形式で表されます。ルックアップテーブルでは、線形補間と線形外挿が使用されます。
彩度は次の方法でパラメータ化できます。
- 負荷曲線なし
- 磁束対電流
最初のケースでは、磁化曲線が無負荷曲線として定義され、変数はPythonリストとして定義される必要があります。2番目のケースでは、磁化曲線が磁束対電流として定義され、磁化電流成分のimdベクトルとimqベクトルはPythonリストとして定義され、磁化磁束成分のpsimdテーブルとpsimqテーブルはネストされたPythonリストとして定義される必要があります。内部リストの数はimdベクトルの要素数と等しく、各内部リストの要素数もimqベクトルの要素数と等しくなければなりません。
if_vector = [0, 4514.0, 9498.0, 13260.0, 15260.0, 16710.0, 18200.0, 19210.0, 21340.0, 23650.0, 25930.0] vs_vector = [0.0, 4986.55, 10388.65, 14313.256, 16298.64, 17637.6, 18884.26, 19623, 20915.82, 22116.28, 23224.4]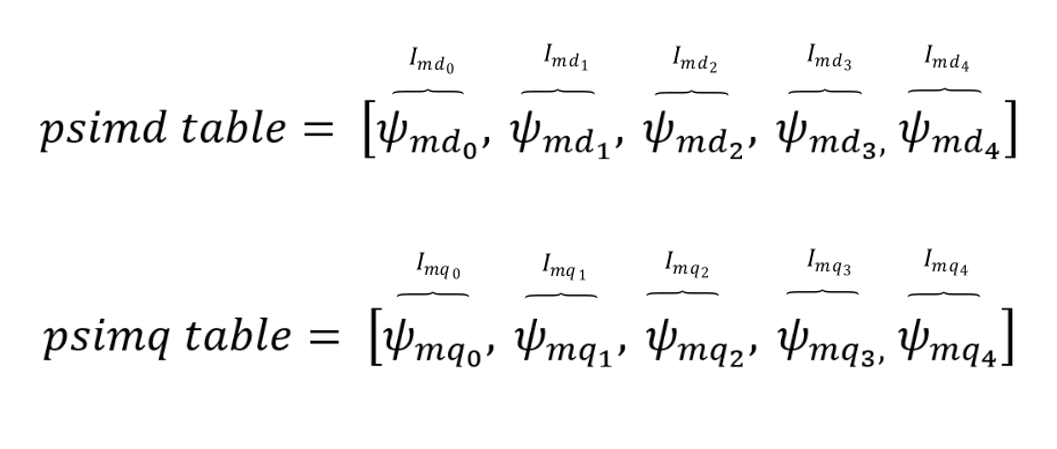
imd_vector = [-9498.0, -8548.2, -7598.4, -6648.6, -5698.8] imq_vector = [-9498.0, -8548.2, -7598.4, -6648.6, -5698.8] psimd_table = [-22.46306805, -20.2273073, -17.99014399, -15.75121391, -13.51008229] psimq_table = [-11.07784855, -9.9724961, -8.86656821, -7.76004375, -6.65291642]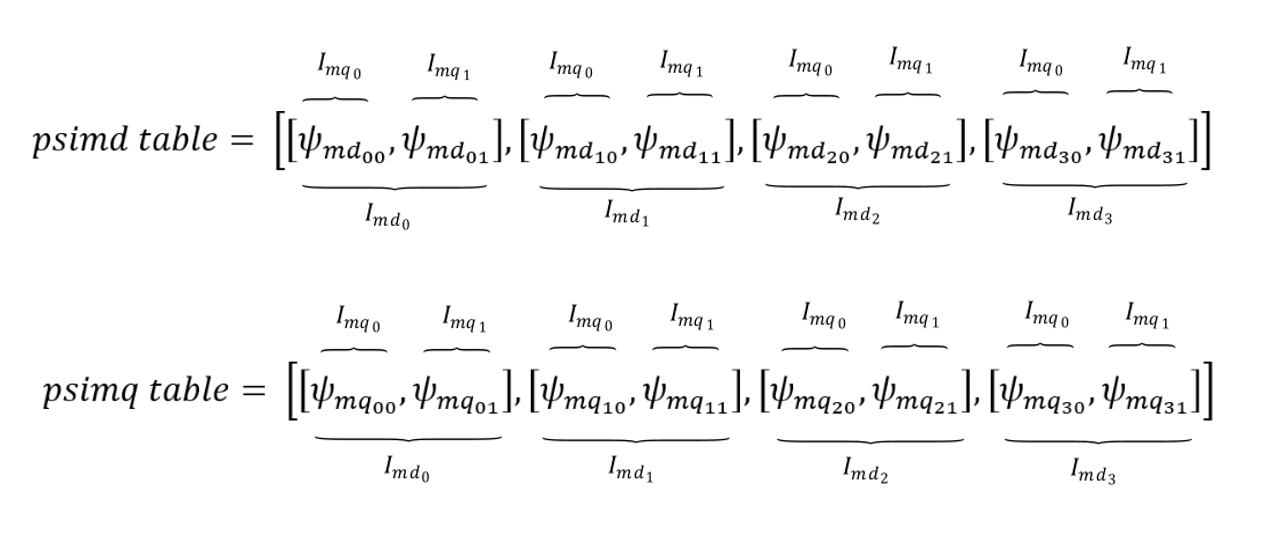
imd_vector = [-9498.0, -8548.2, -7598.4, -6648.6, -5698.8] imq_vector = [-9498.0, -8548.2, -7598.4, -6648.6, -5698.8] psimd_table = [[-22.46306805, -22.46854837, -22.47394023, -22.47914448, -22.48404604], [-20.2273073, -20.23340111, -20.23948657, -20.24544982, -20.25115112], [-17.99014399, -17.99688273, -18.00373418, -18.01057435, -18.01723878], [-15.75121391, -15.75858553, -15.7662438, -15.77406724, -15.78187459], [-13.51008229, -13.51799327, -13.52642503, -13.53528506, -13.54440031]] psimq_table = [[-11.07784855, -9.9724961, -8.86656821, -7.76004375, -6.65291642], [-11.08362731, -9.97826979, -8.87224078, -7.765498, -6.65801557], [-11.08998614, -9.9847262, -8.87869102, -7.77180627, -6.6640132], [-11.09691706, -9.99189941, -8.88600464, -7.77911226, -6.67111073], [-11.10434879, -9.99976596, -8.89422511, -7.7875446, -6.67953349]]ポート
- A(電気)
- ステータ巻線 A 相ポート。
- B(電気)
- ステータ巻線相 B ポート。
- C(電気)
- ステータ巻線相Cポート。
- R1(電気)
- 界磁巻線ポート1。
- R2(電気)
- 界磁巻線ポート2。
- で
- モデルロードソースを選択した場合に使用可能
電気(タブ)
- モデルタイプ
- マシン モデルの実装を指定します。
- モデルの忠実度には線形と非線形の2つのレベルがあります。
- 定格速度
- モデル タイプが非線形に設定されている場合に使用できます。
- 無負荷曲線として定義される磁化曲線の非線形モデルで使用される機械の機械的定格速度[rpm]
- 倍率カーブタイプ
- モデル タイプが非線形に設定されている場合に使用できます。
- 以下の飽和タイプを指定できます - 負荷曲線なし、磁束対電流
- ダンパー巻線の数
- Q軸のダンパー巻線の数を変更する
- ルピー
- 固定子相抵抗 [Ω]
- Lls
- 固定子相漏れインダクタンス[H]
- ライト
- 直軸磁化(相互、主)インダクタンス [H]
- ルムク
- 直交軸磁化(相互、主)インダクタンス [H]
- 無線周波数
- 固定子を基準とした界磁巻線抵抗 [Ω]
- Llfd
- 固定子基準の直軸界磁巻線漏れインダクタンス[H]
- ラックド
- 固定子を基準とした直軸ダンパー巻線抵抗 [Ω]
- ルクク
- 固定子を基準とした直交軸ダンパー巻線抵抗 [Ω]
- Rkq2
- ダンパー巻線数が 2 に設定されている場合に使用できます。
- 固定子を基準とした第2直交軸ダンパー巻線抵抗[Ω]
- ルクド
- 固定子を基準とした直軸ダンパー巻線漏れインダクタンス[H]
- ルクク
- 固定子を基準とした直交軸ダンパー巻線の漏れインダクタンス[H]
- Llkq2
- ダンパー巻線数が 2 に設定されている場合に使用できます。
- 固定子を基準とした第2直交軸ダンパー巻線漏れインダクタンス[H]
- ベクトルの場合
- モデルタイプが非線形(荷重曲線なし)に設定されている場合に使用可能
- 界磁巻線を基準とした無負荷励磁電流一覧 [A]
- 対ベクトル
- モデルタイプが非線形(荷重曲線なし)に設定されている場合に使用可能
- 無負荷ステータ線間RMS電圧一覧 [V]
- imdベクトル
- モデルタイプが非線形 - 磁束対電流に設定されている場合に使用可能
- 磁化電流直軸成分値一覧 [A]
- imqベクトル
- モデルタイプが非線形 - 磁束対電流に設定されている場合に使用可能
- 磁化電流直交軸成分値一覧 [A]
- psimdテーブル
- モデルタイプが非線形 - 磁束対電流に設定されている場合に使用可能
- 磁化磁束直軸成分値表 [Wb]
- psimqテーブル
- モデルタイプが非線形 - 磁束対電流に設定されている場合に使用可能
- 磁化磁束直交軸成分値表 [Wb]
- Ns/Nfd
- ステータ相巻線と界磁巻線間の巻数比。界磁巻線変数をステータ側に変換するために使用される。
- Ns/Nkd
- 固定子相巻線と直軸ダンパー巻線間の巻数比。ダンパー巻線変数を固定子側に変換するために使用される。
 TyphoonSimではNs/Nkd巻数比はサポートされていません。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
TyphoonSimではNs/Nkd巻数比はサポートされていません。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- Ns/Nkq
- 固定子相巻線と直交軸ダンパー巻線間の巻数比。ダンパー巻線変数を固定子側に変換するために使用される。
- TyphoonSimではNs/Nkq巻数比はサポートされていません。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- 液晶
- 固定子を基準としたカナイ漏れインダクタンス[H]
メカニカル(タブ)
- 月経前緊張症
- 機械の極対数
-
スター/デルタ
- 固定子巻線接続(スターまたはデルタ)
 TyphoonSimではステータ巻線接続オプションはサポートされていません。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
TyphoonSimではステータ巻線接続オプションはサポートされていません。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- ジャム
- ローターと負荷の合成慣性モーメント [kgm2]
- 摩擦係数
- 機械粘性摩擦係数[Nms]
- 制約のない機械角度
- 機械角を0~2πに制限
ロード(タブ)
- ロードソース
- 負荷ソースは、SCADA/外部またはモデルから設定できます (モデルの場合、1 つの信号処理入力が表示されます)。
- TyphoonSimでは、負荷ソースとしてSCADA/外部を選択した場合、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送信されると、アナログ入力1にも表示されます。
- 外部/モデル荷重タイプ
- 負荷の種類: トルクまたは速度
- AIピンをロード
- 外部トルク/速度コマンド用の AI ピンをロードします。
- リアルタイム/VHIL シミュレーションでは、Load ai ピンは外部トルク コマンドの HIL アナログ入力アドレスを表します。
- TyphoonSimでは、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送られると、アナログ入力1にも表示されます。
- SCADA/外部がロード ソースとして設定されている場合にのみ使用できます。
- AIオフセットをロード
- 外部トルクコマンドを表す入力信号にオフセット値を割り当てます。
- SCADA/外部がロード ソースとして設定されている場合にのみ使用できます。
- ロードAIゲイン
- 外部トルクコマンドを表す入力信号にゲイン値を割り当てます。
- SCADA/外部がロード ソースとして設定されている場合にのみ使用できます。
外部負荷を使用すると、load_ai_pin アドレスを持つ HIL/TyphoonSim (TyphoonSim の内部仮想 IO バス) アナログ チャネルからのアナログ入力信号を外部トルク/速度負荷として使用し、次の式に従って入力信号にオフセット (V) とゲイン (Nm/V) を割り当てることができます。
フィードバック(タブ)
- エンコーダー ppr
- インクリメンタルエンコーダの1回転あたりのパルス数
- エンコーダZパルス長
- Zデジタル信号パルスの長さ(周期)。1 /4周期または全周期(デフォルト)を選択できます。
- レゾルバ極対
- レゾルバの極対数
- リゾルバキャリアソース
- レゾルバキャリア信号源の選択(内部または外部)
- レゾルバキャリア周波数
- レゾルバキャリア信号周波数(内部キャリア)[Hz]
- リゾルバキャリアソースプロパティが内部に設定されている場合にのみ使用可能です
- 外部リゾルバキャリアソースタイプ
- 外部レゾルバキャリア信号源タイプの選択(シングルエンドまたは差動)
- リゾルバキャリアソースプロパティが外部に設定されている場合にのみ使用可能です
- レゾルバAIピン1
- レゾルバキャリア入力チャネル1アドレス(外部キャリア)
- リゾルバキャリアソースプロパティが外部に設定されている場合にのみ使用可能です
- TyphoonSimでは、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送られると、アナログ入力1にも表示されます。
- リゾルバAIピン2
- レゾルバキャリア入力チャネル2アドレス(外部キャリア)
- リゾルバキャリアソースプロパティが外部に設定され、外部リゾルバキャリアソースタイププロパティが差動に設定されている場合にのみ使用できます。
- TyphoonSimでは、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送られると、アナログ入力1にも表示されます。
- リゾルバAIオフセット
- レゾルバキャリア入力チャンネルオフセット(外部キャリア)
- リゾルバキャリアソースプロパティが外部に設定されている場合にのみ使用可能です
- TyphoonSimでは、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送られると、アナログ入力1にも表示されます。
- リゾルバAIゲイン
- レゾルバキャリア入力チャンネルゲイン(外部キャリア)
- リゾルバキャリアソースプロパティが外部に設定されている場合にのみ使用可能です
- TyphoonSimでは、アナログ信号は内部の仮想IOバスから読み取られます。したがって、アナログ出力1に何らかの信号が送られると、アナログ入力1にも表示されます。
- アブソリュートエンコーダプロトコル
- 絶対的なマシン エンコーダ位置を提供する標準化されたプロトコル。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- シングルターンビット
- マシン絶対エンコーダシングルターンビットの数。
- 絶対エンコーダ プロトコルが「なし」でない場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- マルチターンを有効にする
- マルチターン絶対エンコーダのサポートを有効にします。
- 絶対エンコーダ プロトコルが「なし」でない場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- マルチターンビット
- マシン絶対エンコーダマルチターンビットの数。
- 「マルチターンを有効にする」がチェックされている場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- EnDat/SSI/BiSSクロックDIピン
- 選択した絶対エンコーダ プロトコル タイプのクロック デジタル入力ピン。
- 絶対エンコーダ プロトコルが「なし」でない場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- クロックDIロジック
- クロック DI ピンのロジック: アクティブ ハイ/アクティブ ロー。
- 絶対エンコーダ プロトコルが「なし」でない場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- EnDatデータDIピン
- EnDat データデジタル入力ピン。
- 絶対エンコーダ プロトコルがEnDat の場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
- データDIロジック
- EnDat データ DI ピン ロジック: アクティブ ハイ/アクティブ ロー。
- 絶対エンコーダ プロトコルがEnDat の場合にのみ使用できます。
-
TyphoonSimでは絶対エンコーダプロトコルは無視されます。この値を変更しても、TyphoonSimのシミュレーションにはまったく影響しません。
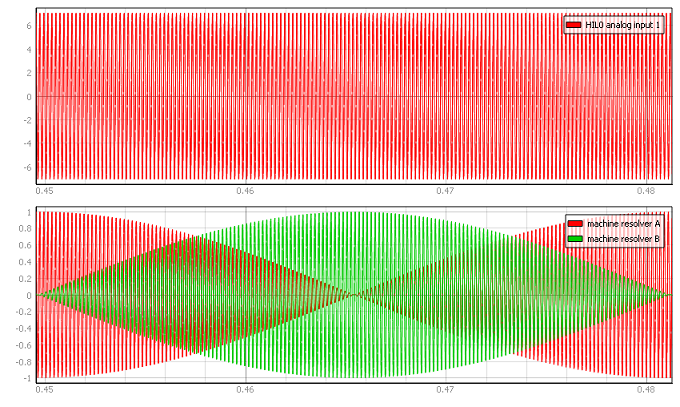
外部レゾルバキャリアソースを選択した場合、ソース信号タイプはシングルエンドまたは差動のいずれかに設定できます。シングルエンド外部レゾルバキャリアソースタイプでは、HIL/TyphoonSim(TyphoonSimの内部仮想IOバス)のアナログチャンネルから、res_ai_pin_1アドレスを外部キャリアソースとしてアナログ入力信号を使用できます。さらに、入力信号には、以下の式に従ってオフセット(V)とゲイン(V/V)の値を割り当てることができます。
差動外部レゾルバキャリアソースタイプでは、HIL/TyphoonSim(TyphoonSimの内部仮想IOバス)アナログチャンネルから、res_ai_pin_1およびres_ai_pin_2アドレスを持つ2つのアナログ入力信号を使用できます。これらのHIL/TyphoonSim(TyphoonSimの内部仮想IOバス)アナログ入力からのアナログ信号は減算され、その結果が外部差動キャリアソースとして使用されます。さらに、入力信号には(シングルエンドの場合と同様に)オフセット(V)とゲイン(V/V)値を以下の式に従って割り当てることができます。
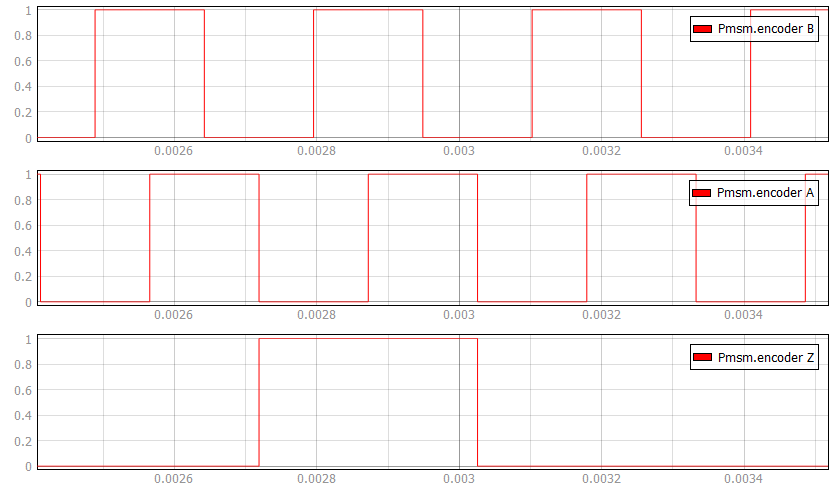
エンコーダ信号を適切に生成するには、次の式が成り立つ必要があります。
| シンボル | 説明 |
|---|---|
| enc_ppr | エンコーダの1回転あたりのパルス数 |
| f m | ローター機械周波数[Hz] |
| Ts | シミュレーション時間ステップ[秒] |

高度な
- シータ_ab
- 固定子位相a軸に対する固定αβ参照フレームの位置[rad]
- フィールド入力
- 界磁巻線に印加される物理量(電圧または電流)。回転子側を指します。
入力磁界電流をステータパラメータに反映させるには、 N s /N fd 電気タブでは、
注:界磁入力が電流として定義されている場合、界磁巻線方程式は数学モデルから削除されます。代わりに、界磁入力電流がモデルの入力として使用されます。現時点では、電流入力による2つのq軸ダンパー巻線はサポートされていません。線形機モデルでは、界磁巻線に電圧または電流を印加するかどうかを選択できます。非線形機モデルでは、界磁入力として電圧のみを使用できます。- フィールド入力オプションはTyphoonSimではサポートされていません。値を変更してもTyphoonSimのシミュレーションにはまったく影響しません。
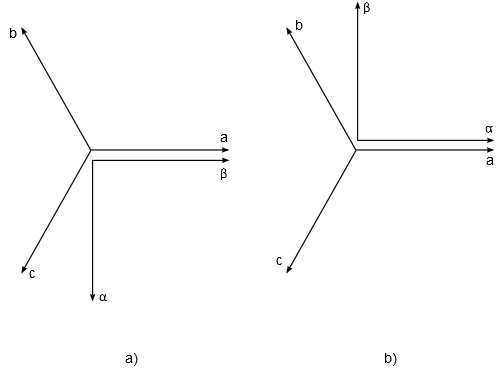
機械モデルの出力変数(電流、電圧、磁束)は、静止参照フレームから観測できます。電気機械のモデリングでは、広く用いられている2つのアプローチがあります。1つ目は、静止参照フレームのα軸がステータ位相a軸に対して90度遅れている方法です(デフォルトで使用され、図8のaに示されています)。2つ目は、α軸がステータ位相a軸と一致している方法です(図8のbに示されています)。ユーザーは、この2つの状況を選択できます。
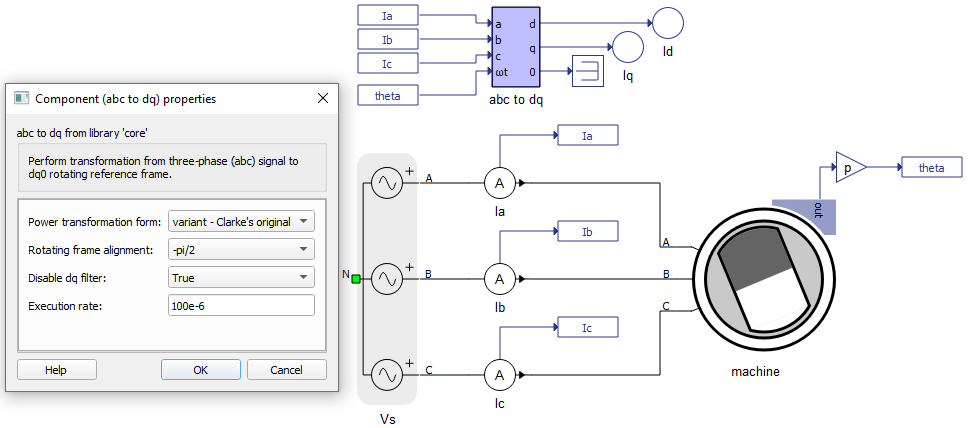
ローター位置フィードバックが必要な場合、 Theta_abの値を知ることが重要です。例えば、モデルが機械角度をフィードバック信号として使用し、それをabc to dq 、 alpha beta to dq 、 dq to abc 、またはdq to alpha betaのいずれかの変換ブロックに入力する場合、期待どおりのシミュレーション結果を得るためには、両方のコンポーネントで同じ変換角度オフセット値を使用する必要があります。
スナッバー(タブ)
- RSNBローター
- ロータースナバ抵抗値 [Ω]
- Rsnbステーター
- ステータスナバ抵抗値 [Ω]
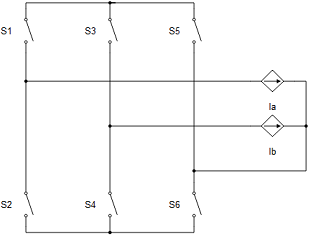
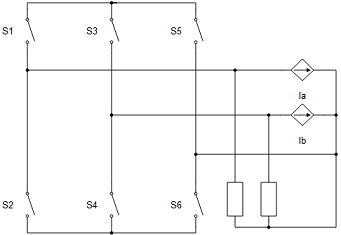
電流源ベースの回路インターフェースを持つすべてのマシンには、プロパティ ウィンドウに[スナバ]タブがあり、スナバ抵抗の値を設定できます。インバータまたはコンタクタがマシンの端子に直接接続される場合、スナバが必要です。この値は無限大 ( inf ) に設定できますが、電流源がオープン スイッチに直接接続されるため、マシンがインバータに直接接続されている場合は推奨されません。この場合、トポロジの競合を回避するために、各スイッチ ペア S1 と S2、S3 と S4、および S5 と S6 のいずれかが回路ソルバーによって強制的に閉じられます。一方、有限のスナバ値を使用すると、常に電流 Ia と Ib のパスが存在するため、この場合はすべてのインバータ スイッチをオープンにすることができます。この回路のスナバ抵抗なしとスナバ抵抗ありの回路図をそれぞれ図 10と図 11に示します。スナバは電流源に接続されます。
出力(タブ)
このブロックタブは、機械からのベクトル化された単一の信号出力を可能にします。出力ベクトルには、選択された機械の機械的変数および/または電気的変数が、このタブにリストされている順序と同じ順序で含まれます。
- 実行率
- 信号処理出力実行速度[秒]
- 電気トルク
- 機械電気トルク[Nm]
- 機械速度
- 機械の機械角速度[rad/s]
- 機械角度
- 機械機械角度 [rad]
- 固定子α軸電流
- 固定子電流のアルファ軸成分[A]
- 固定子β軸電流
- 固定子電流のベータ軸成分 [A]
- ステータd軸電流
- 固定子電流の直軸成分[A]
- ステータQ軸電流
- 固定子電流の直交軸成分[A]
- 固定子α軸磁束
- 固定子磁束のアルファ軸成分[Wb]
- 固定子β軸磁束
- 固定子磁束のベータ軸成分[Wb]
- 固定子d軸磁束
- 固定子磁束の直軸成分[Wb]
- 固定子q軸磁束
- 固定子磁束の直交軸成分[Wb]
特典(タブ)
「Extras」タブでは、コンポーネントの信号アクセス管理を設定できます。
- パブリック - パブリックとしてマークされたコンポーネントは、すべてのレベルでシグナルを公開します。
- 保護済み - 保護済みとしてマークされたコンポーネントは、最初のロックされた親コンポーネントの外部のコンポーネントへの信号を非表示にします。
- 継承 - 継承としてマークされたコンポーネントは、継承以外の値に設定されている最も近い親の 'signal_access' プロパティ値を取得します。